环链吊具(盾构机上管片起重机的控制方法)
Posted
篇首语:壮心未与年俱老,死去犹能作鬼雄。本文由小常识网(cha138.com)小编为大家整理,主要介绍了环链吊具(盾构机上管片起重机的控制方法)相关的知识,希望对你有一定的参考价值。
环链吊具(盾构机上管片起重机的控制方法)
杨灿兴 方线伟 韩明强
法兰泰克重工股份有限公司 苏州 215211
摘 要:管片起重机是盾构机的重要组成部分,担负着在盾构机桥架部分运输隧道管片的工作,设备的可靠运转保证了盾构机24 小时连续工作。管片起重机安装在盾构机的双轨梁下方,一般由2 台或4 台环链葫芦、电动牵引小车和连接件等构成,由于多台葫芦的联动,因此对设备的电气控制有更高的要求,区别于传统继电器控制,文中将重点探讨一种新的盾构机上管片起重机的控制方法。
关键词:盾构机;管片起重机;同步;一键调平;控制方法
中图分类号:U455.3+9 文献标识码:A 文章编号:1001-0785(2020)02-0063-04
伴随着大中城市轨道交通的高速发展,盾构机的需求日益加大,从而也带来了管片起重机的迅速发展。管片起重机作为盾构机不可或缺的一部分,需要连续工作,这对管片起重机控制的可靠性有了更高的要求,故选择高可靠性的控制系统尤为重要。
1 管片起重机的系统及性能参数
管片起重机整体安装在盾构机的双轨梁下方,由4台固定式环链葫芦、电动牵引小车、连接件和电气控制等部分构成。管片起重机系统图如图1 所示,管片起重机电动葫芦型号为VR25 5004b2,起重量为20 t,小车轨距为2 060 mm,轨道倾角tanα 为0.05,起升高度为3.2m,工作级别为M5,起升速度为0.4~4 m/min(变频),小车速度为0.2~20 m/min(变频,满载)、0.2~40 m/min(变频,轻载),起升机构电动机功率为3.6 kW、转速为3 000 r/min,小车机构电动机功率为2×7.5 kW、转速为1 445 r/min,真空吸盘机构液压站电动机功率为2×2.7 kW、转速为1 420 r/min,真空吸盘机构旋转电动机功率为2.2 kW、转速为3 000 r/min。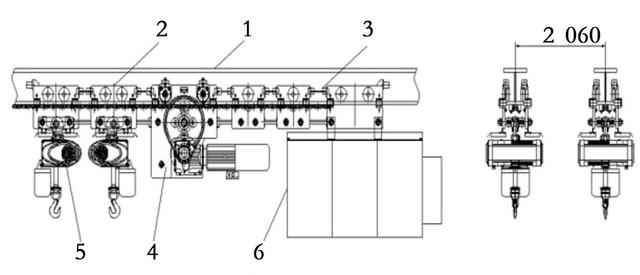
1. 小车轨道 2. 小车车轮组 3. 连接件4. 三合一小车驱动机构 5. 环链葫芦 6. 电控箱
图1 管片起重机系统图
2 管片起重机传统的控制方法及特点
本盾构机上管片起重机采用的是4 台固定式环链葫芦同时起吊管片吊具,两个固定式环链葫芦组合起来固定在小车上,分别为小车1 和小车2,两个小车之间机械上无刚性连接,相互独立。电气控制通过一发双收的遥控器来达到同时控制双侧小车的起升和运行的目的,真空吸盘的控制不能集成在管片起重机遥控器上,也不能与管片起重机进行连锁,需选择独立遥控器控制。葫芦间无累加超载功能,不能有效地控制真空吊具的偏载。管片起重机控制简图如图2 所示。

图2 管片起重机控制简图
葫芦的起升为常规继电器控制,其优点是控制电路简单。缺点是起升和运行同步性能差,运行期间同步不可控,如发现偏差只能通过切换到单动模式,人为调节使起升和(或)运行在相对高度和(或)位置上。初始同步点的控制因人而异,因此存在不可控、安全隐患大等问题,同时需要两套遥控器控制,且要求控制管片起重机的遥控器需具有一发双收功能,遥控器成本高,操作人员需携带2 只遥控器,操作极不便捷。
3 管片起重机新的控制方法及特点
为了解决传统管片起重机的问题,新方案在控制方法上进行了改进。起升机构不再采用双速电机的调速方式,改用变频控制,并在电机的轴端加装编码器进行速度反馈。运行机构也由开环改为闭环控制。新方案调速精度高,起动转矩大,停车更平稳。
每个小车采用SIEMENS S7-300 PLC 控制,起升、运行选用ABB ACS880 系列变频器,PLC 与变频器采用总线控制方式,PLC 同时将编码器的脉冲数折算成位移进行存储。两个小车的PLC 之间通过无线通讯方式进行实时数据交换,时刻比较起升和小车之间的数值,进而调节变频器实现各自的运动相对同步。初始状态具有一键调平功能,自动将两机构对齐到同一水平高度或同一垂直截面上。如两吊钩误差超出预设值(根据工况自由设定)时停车,确保抬吊的重物不发生大的偏斜。2 个PLC 之间的无线通讯采用的是ORing 公司的IAP-420-EU 产品,通讯速率高、距离远、抗干扰能力强,完全满足2 个PLC 间的数据交换需求。管片起重机控制网络图如图3 所示。
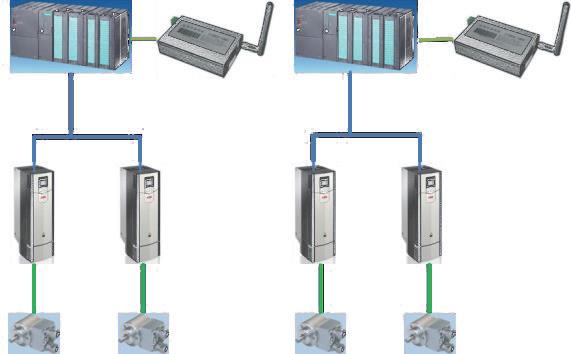
图3 管片起重机控制网络图
通过一发一收的遥控器来达到同时控制双侧小车的起升和运行的目的。此时的遥控器只需最基本的功能,遥控器功能简单,成本低。真空吸盘的控制集成在管片起重机遥控器上,实现与管片起重机的连锁。管片起重机遥控器控制简图如图4 所示。
图4 管片起重机遥控器控制简图
控制箱内设置有必要的状态指示灯,包括两只PLC通讯正常指示灯,同步偏差报警指示灯,手电门控制激活指示灯及小车遥控器等指示信号。改进后的方案使操作人员操作更便捷、安全性更高。
3.1 两组起升机构的同步起升
由于两组起升机构在机械结构上是完全独立的,没有任何刚性连接,但在工作时,两组起升吊钩下部会悬挂同一个吊具机构(真空吸盘),用于吸取盾构管片,可以同上同下,也可以单独上下动作。当在同步运行时,要求其相对误差不超过2 mm,同步控制精度要求较高。方案中,只能依靠电气实现同步,采用ACS880 系列变频器D2D 主从控制的负荷分配功能。同时,两台起升电机必须配置编码器,编码器一方面用于变频器的闭环控制,提高控制精度,改善动态响应,优化抱闸控制逻辑;另一方面,用于同步起升时位置计算。
D2D(Drive To Drive Link)是工业传动模块,用来完成变频器之间的快速通讯功能。在多台电机传动控制过程中,各分部电机的负载率相同,即δ=P/Pa 相同(P为电机所承担的负载功率,Pa 为电机额定功率)。在负荷分配调节过程中不能影响本传动组以外各分部的速度。负荷分配中,选取一台电机作为本组主电机,连接在速度链主链上,其它电机作为子电机,形成子链控制结构。变频器对变频器连接是一种菊花链式RS-485 传输线路,它允许与一个变频器和多个变频器进行基本的主从式通信,通信速率可达到8 Mbit/s。在变频器对变频器连接位于末端的变频器终端电阻必须设置为ON,位于中间的变频器上的终端电阻必须设置为OFF。接线时必须使用双绞屏蔽电缆。电缆最大长度为50 m,如图5 所示为主从接线图。
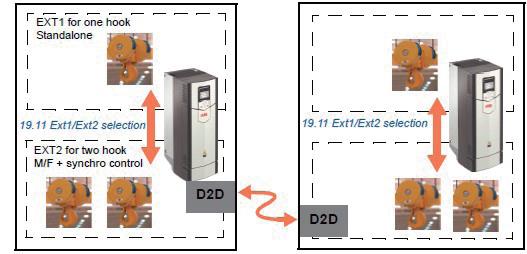
图5 主从接线图
3.2 一键调平功能
两台独立的起升机构(包含各自的小车运行机构)在联动运行时需要同步起升,且需确保其共同水平起吊一组管片,故需要确保两组吊钩初始位置处于水平,传统方式是手动调平,效率较低,精度较差。系统中可以采用自动模式,两组吊钩可以在任意位置自动对齐。其工作原理为:在主站PLC 中,需要编写程序,分别读取两组起升机构变频器位置参数(编码器脉冲计算),以上升停止限位为“零点”作为参考,读取的瞬时位置值与零点值比较,得到每组吊钩的相对位置值,两组吊钩(A 和B)的相对位置值相减得到两组吊钩间位置相对值δ=H (A)-H (B)。当δ=0 时,表示两组吊钩位置相同,无需调整;当δ > 0 时,表示A 组较B 组位置低,以A 组为参考点,B 组调整向下运行,继续比较,直到δ=0 时表示调平;当δ < 0 时,表示A 组较B 组位置高,以A 组为参考点,B 组调整向上运行,继续比较,直到δ=0 时表示调平。在实际调整过程中,当偏差值δ较大时,可以先快速运行,直到δ 较小时慢速运行调平到位。
3.3 两台设备PLC 间无线通信数据交换
由于整体系统是由两套独立的设备组成,每套设备都有完整的电控系统,包括PLC、变频器等,两套设备间即可组合联动,也可单动。联动时要确保所有机构运行同步,限位、故障等连锁,涉及到两套设备PLC 间的通讯、数据交换。由于每套设备都是移动的,因此为PLC 增加无线通信是更便捷,可靠的方案。
无线PLC 是具有无线通信功能的PLC。它在传统PLC 的基础上针对远程测控做了优化,硬件上除具备传统PLC 的输入采集、继电器控制、定时器和串口通信等功能外,增加了GPRS、短信和无线数传电台等通信功能。在软件上除具备传统PLC 的读输入、执行程序、处理通信请求、执行CPU 自诊断和写输出这五个扫描周期过程外,增加了信道管理、驱动管理、采集管理和应用管理等远程采集管理功能。在外观上除具有与传统PLC 相同的外观基础外,如接线端子、指示灯和串口接口(扩展接口)等,增加了无线通信有关的SIM 卡座和天线接口等部件。无线PLC 与传统PLC 相比最大的优势,是无需外接无线通信模块和编写接口驱动程序,即可直接构建远程测量系统、远程控制系统和远程报警系统等远程测控方案。如图6 所示为远程通信无线PLC工作原理图,图7 所示为无线PLC 信号传递过程,图8所示为系统结构配置图。
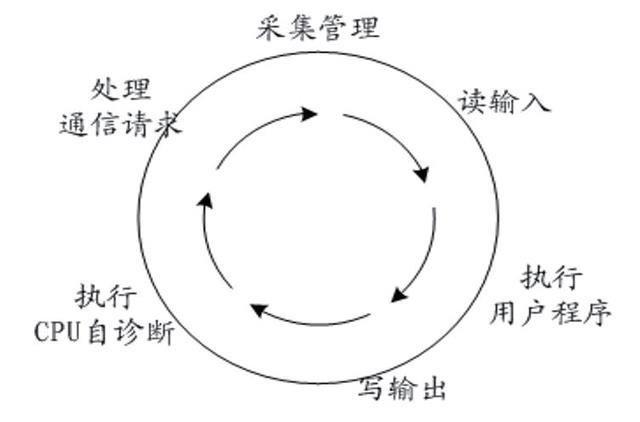
图6 远程通信无线PLC 工作原理
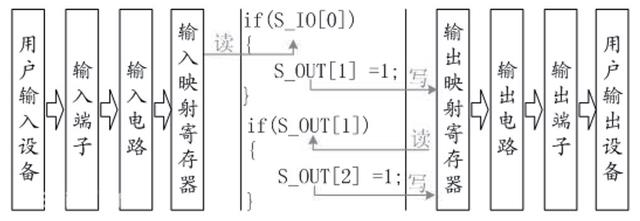
图7 无线PLC 信号传递过程
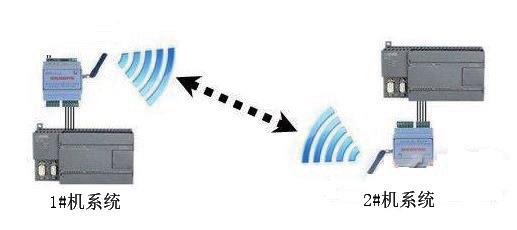
图8 系统结构配置图
4 管片起重机新控制方案的应急措施
管片起重机备有应急用的有线手电门,手电门和遥控器通过重载接插件的方式互换使用。每个小车的控制箱均留有同样的控制接口,小车间的控制地锁定由PLC的内部程序完成。在管片起重机的联动同步模式不能使用时,如检修或初期设备安装等特殊情况时,可切换到单动模式,即单小车运行模式。在单动模式下,PLC 间不再检测两者之间的通讯是否正常,也不再做同步运算,彼此间完全独立。此备用功能可增加系统的可靠性,减少了停机时间。
5 管片起重机控制方案的辅助设备
管片起重机具有起重量限制功能,实时保护,确保不超载。联动时,累加超载。单动时,以各自额定起重量为准。超载保护还具有轻载信号输出,轻载模式下,运行均按200% 的额定速度运行,极大的提高了生产效率。管片起重机的起升和运行方向均设置有行程极限保护,能有效的将管片起重机的运行限定在所设计的行程范围内,确保设备运转的安全性。
联动时,管片起重机和吊钩下的真空吸盘吊具具有联锁保护,真空吸盘的控制集成在遥控器上,真空吸盘的反馈信号参与控制,真空吸盘有六个控制信号和两个反馈信号,其吸合控制采用一个按钮,释放控制采用两个按钮,减小误动作。真空吸盘不吸料或吸料中且真空度正常,管片起重机运行能启动。真空吸盘在吸料的过程中,管片起重机运行不能启动。真空吸盘的释放取决于吊钩是否处在轻载状态(即真空吊具无吸料或吸料已着地)或者吊钩是否处在下降减速行程范围。真空吸盘吊具图如图9。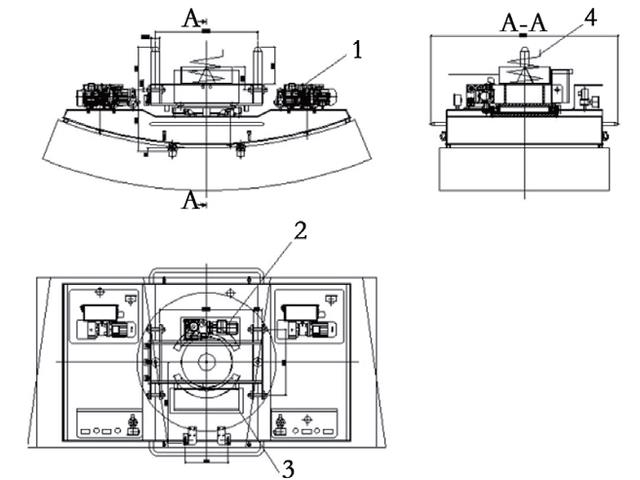
1、液压泵 2、旋转电机 3、吸盘控制箱 4、动力及控制电缆
图9 真空吸盘吊具
6 结论
采用新的控制方法后,系统的操作更简单,性能更可靠,效率更高。该系统方案已成功运用在国内某工程公司的盾构机上,且运行状况良好。今后将继续完善该设备的功能,满足不同客户的需求。
参考文献
[1] GB3811—2008 起重机设计规范[S].
[2] 张质文,虞和谦,王金诺,等. 起重机设计手册[M]. 北京:中国铁道出版社,1998.
[3] GB6067—2010 起重机械安全规程[S].
相关参考
目前磁力吊具主要有起重电磁铁、起重电永磁铁、永磁吸吊器、自动永磁吸吊器。 起重电磁铁的特点是通过电流的有无来控制吸力,使用方便,节省时间。起重电永磁铁是通过电流脉冲产生磁力,工作过程不需要用电,...
目前磁力吊具主要有起重电磁铁、起重电永磁铁、永磁吸吊器、自动永磁吸吊器。 起重电磁铁的特点是通过电流的有无来控制吸力,使用方便,节省时间。起重电永磁铁是通过电流脉冲产生磁力,工作过程不需要用电,...
...造的更新一款轻型起重吊装设备,迎合了性能较高的进口环链电动葫芦特别适用于很小距离,使用频繁,密集性吊运作业,具有高效、节能、省事、占地面积小,易于操作与维修等特点。移动式悬臂吊更具灵活机动、适应性广等...
一说到钢板搬运神器大家想到那些?电永磁吊具,永磁起重器,电磁吸盘,吊钩,吊钳,欢迎大家在文末投票选出钢板搬运神器!钢板搬运神器今日为大家讲解的是钢板搬运神器中的一款新型起重吊具,也是当下“智能制造”大...
日式翻转钢板钳(钢板起吊搬运不再难找对吊具轻松解决(千豪快讯))
一说到钢板搬运神器大家想到那些?电永磁吊具,永磁起重器,电磁吸盘,吊钩,吊钳,欢迎大家在文末投票选出钢板搬运神器!钢板搬运神器今日为大家讲解的是钢板搬运神器中的一款新型起重吊具,也是当下“智能制造”大...
...间的搬运过程中用电不便,这时,型材专用充电式电永磁吊具的出现就显得十分必要。充电式电永磁吊具型材专用充电式电永磁吊具顾名思义是专为H型钢、角钢、L型钢材的吊装进行设计的,它自带蓄电池,无需外接电源,非常...
...程技术—第四篇起重技术一技;三大技术;(3分)一、起重机械与吊具;起重机械分类;1、轻小型起重设备;千斤顶、滑车、起重葫芦、卷扬机。2、起重机;桥架型、臂架型、缆索型。使用要求;千斤顶;1、座下垫木板或钢...
强力永磁起重吸盘(起重吊具,电永磁吸盘,磁力模板价格?看完你就知道了)
近日市场上出现恶意竞争厂商,#起重吊具#价格以声称比所有报价低2000为吸引。我公司郑重声明:质量是企业的尊严和生命!为了给国内外客户提供适用、满意的产品与服务,我司给出的报价均为多层评估慎重决定!电永磁吸盘...
1.盾构机的掘进液压马达驱动刀盘旋转,同时开du启盾构机推进油缸,将盾构机向前推进,随着推进油缸的向前推进,刀盘持续旋转,被切削下来的碴土充满泥土仓,此时开动螺旋输送机将切削下来的渣土排送到皮带输送机上,...