焊接机械手(新能源车身制造需要什么样的焊接机器人?)
Posted
篇首语:世界上三种东西最宝贵本文由小常识网(cha138.com)小编为大家整理,主要介绍了焊接机械手(新能源车身制造需要什么样的焊接机器人?)相关的知识,希望对你有一定的参考价值。
焊接机械手(新能源车身制造需要什么样的焊接机器人?)

1 序言
新能源是国家扶持发展的战略新兴产业,也是全球“双碳”大背景下构筑发展新优势的低碳绿色产业。近几年国家密集出台多项扶持新能源汽车发展的相关政策,使我国新能源汽车产业驶入快车道。据悉,2022年1-10月新能源汽车产销分别达到548.5万辆和525万辆,同比均增长1.1倍,市场占有率达到24%。新能源汽车市场的增长对汽车生产技术提出了更高要求,相较于传统燃油车,新能源汽车更需要轻量化,以缓解“电动化”和“智能化”带来车辆质量增加的问题,从而提升续航里程和整车性能。
在实现车身减重的轻量化新材料、结构优化设计、轻量化制造工艺三种方式中,材料轻量化是一项基础性的核心技术,对提高汽车续航能力等关键性能具有重要意义。轻量化材料的应用必然会导致车身连接技术的变化,传统钢车身90%以上为电阻点焊,轻量化车身以冷连接工艺为主,热连接及胶接为辅。因连接工艺局限性及对质量要求的不断提高,轻量化车身无法像传统车身那样依靠人工实现连接,催生工业机器人在新能源汽车制造业中得到深入广泛的应用。轻量化新能源车身制造中采用机器人,不仅可以节约人力,降低成本,提高设备利用率,提高产品的质量,更重要的是可以保障人员安全,改善工作条件,减轻劳动强度,提高工作效率[1]。
2 焊装机器人系统简介
汽车白车身连接通常以生产线或工作岛形式进行工艺布局,生产线或工作岛一般由单个或多个工位组成,每个工位可看成是单个连接系统。该系统主要由多台(通常为2或4台)机器人及外部集成系统等构成。
2.1 机器人系统构成
机器人系统主要由机器人本体及外部集成系统组成。机器人本体主要包括机器人、机器人控制器、示教器,外部集成系统根据其集成的不同连接设备或者工装略有差异,一般包括连接设备、连接设备控制系统、连接设备辅助系统、管线包、RIP单元等组成,见表1。根据节拍及车型柔性化的需要,部分机器人存在一对多的情况,需同时配置多台相同或者不同的连接设备及工装,这就需要配置换枪盘、连接设备/工装托架及机器人七轴等[2]。

2.2 单工位系统构成
单工位分总成或白车身总成工位系统主要由工装夹具、机器人连接系统、PLC控制柜、安全围栏等组成。单工位分总成一般采用岛式结构,1~2台机器人对应多套夹具,人工上下件,机器人连接。白车身总成一般采用线体结构,标准工位一般按照4台(具体数量根据工艺需求配备)机器人配置,输送一般采用滚床滑橇,如图1所示。

a)单工位工作岛结构 b)单工位线体结构
图1 单工位机器人系统
3 机器人在新能源车身焊装生产线的应用
机器人在新能源汽车生产线的应用非常广泛,在焊装线规划初期,会根据产品工艺要求及投资情况进行自动化程度定义,合理选择自动化方案。机器人应用场景按照功能划分,一般根据工艺分为连接工艺、涂胶工艺、搬运、检测等。
3.1 焊装机器人应用规划标准
焊装工位或生产线是否选择自动化,一般按照5个维度来进行评估,如图2所示。在方案规划初期,首先考虑生产线柔性化及后续车型预留需要,一般30JPH生产线通常按照2平台4车型,60JPH生产线按照3平台6车型规划,对于存在车型柔性切换需要更换工装、设备的工位需要的优先考虑自动化。其次根据特殊工艺需要来定义自动化方案,对于新能源轻量化车身来说,SPR、FDS、铝点焊、激光焊等工艺由于设备工艺要求、安全、操作性等方面,需要考虑自动化方案。然后考虑质量标准高的区域,如外观焊点位置,为避免焊点扭曲变形影响,需要考虑自动化连接来确保质量稳定可靠。接着考虑下岗位劳动强度是否符合岗位标准,对于劳动强度大,操作困难的作业考虑自动化方案。最后,除以上几个维度外,若选择自动化方案相比手工方案从长期生产运行看有明显经济效益,也优先选择自动方案。

图2 自动化方案选择流程
3.2 机器人连接工艺应用
新能源轻量化车身一般选择钢铝混合路线,充分发挥钢和铝优势,将合适的材料用于最合适的位置。由于下车身电池重量较大,下车身采用更轻质的铝合金,上车身采用高强的高车身,同时在碰撞安全区应用热成形钢等形成安全的笼式结构,其强度是高强铝合金的3倍左右,更可以实现整车上下重量的完美配比,从安全性、操控性、舒适性等多个方面为消费者带来价值,多材料混合的“上钢下铝”车身具有较高的性能和较优的制造及后续维护成本。轻量化钢铝车身连接工艺常见分布情况见表2。
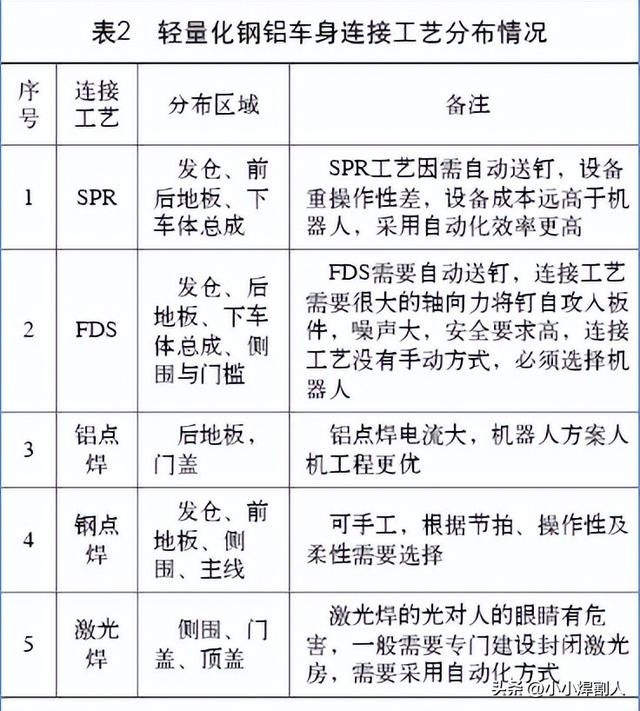
(1)机器人SPR/FDS连接工艺应用 新能源轻量化铝/钢铝车身一般以SPR、FDS冷连接为主。自冲铆连接技术(SPR)是一种在板材和铆钉之间形成连接,不需要预先打孔,而是把所使用的半空或实心铆钉作为冲孔工具的一种高速机械连接工艺,SPR为双面连接,适用于4mm铝/铝钢组合连接。热熔自攻铆接(FDS)是通过高速旋转及轴向下压力使工件发生塑性变形,螺钉穿透工件,形成自攻形成完全啮合的螺纹,拧紧至最终扭矩,适用车身单面连接区域。两种连接工艺一般均采用机器人自动化方式[1]。
某新能源轻量化车身下车体为全铝,车型规划为两平台,节拍30JPH。考虑连接设备成本高,下车体UBGEO工位方案考虑采用小循环台车方案,最大限度提高连接设备利用率。规划4个工位。UB010为台车等待工位,UB020为下车体各总成上件工位,3台机器人将从APC或者EMS小车上分别取前后地板总成、发仓总成,机器人涂胶后上件至台车上。台车输送到UB030工位定位锁紧,4台SPR机器人对下车体进行点定后,台车输送至UB040工位,4台FDS机器人对下车体进行点定后,1台7轴机器人将下车体总成输送至下一工位,通过升降机输送至UB后续线体。具体工艺布置如图3所示。

图3 UBGEO工作岛SPR/FDS工艺布置方案
下车体GEO工作岛规划节拍30JPH,考虑设备开动率85%,单工位节拍为102s,各输送采用高速滚床+台车方式,柔性化考虑台车车型切换,输送节拍举升2~3s,行走6~8s,SPR连接按照6s/点,FDS连接按照平均7s/点,涂胶按照80ms/s,工位节拍及最大连接能力分析详细见表3。

(2)机器人激光焊连接工艺应用 激光焊接技术是以高能激光束为热源,使其冲击焊件接头,通过熔化钎料或母材,完成板材间连接的一种热连接技术。目前白车身激光焊接中应用较为广泛的两种焊接方式为激光钎焊和激光熔焊,图4为两种激光焊接方式的焊缝形式。

a)激光熔焊

b)激光钎焊
图4 两种激光焊接方式的焊缝形式
相比冷连接和传统点焊工艺,激光焊接具有以下优点:①焊接速度快,生产效率高,可以沿任意轨迹进行焊接。②激光光束能量密度高,热影响区域小,焊缝深宽比大,焊接变形小。③可实现不同型号、异种金属之间的焊接。④配合轻量化车身,可实现车身进一步轻量化及降成本。激光焊接应用在轻量化铝合金连接中,用于解决焊接困难,并进一步降低车身重量,目前大量应用在顶盖、后备箱盖、侧围门框、流水槽等位置,某轻量化车身激光焊应用情况见表4。
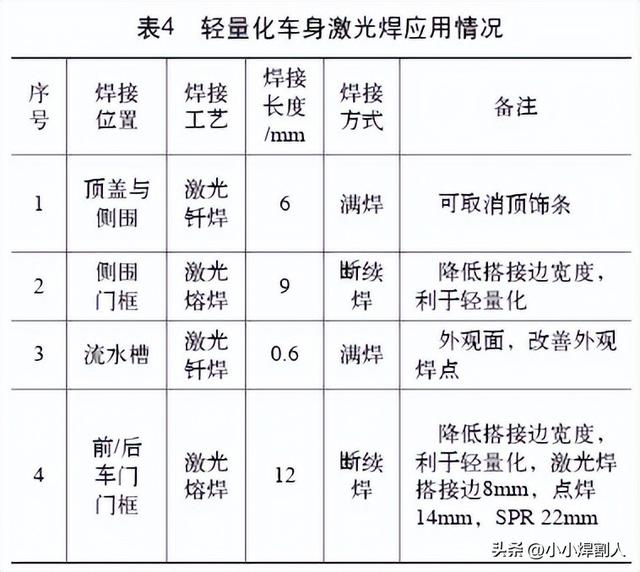
针对激光焊工艺分布情况分别制定工艺方案,顶盖与侧围搭接规划在主线外总拼工位,前后车门门框集中规划在门盖工作岛同一工位进行焊接,侧围门框及流水槽集中在侧围外板线进行规划。以侧围外板为例介绍机器人激光焊工艺应用方案。在侧围外板线规划建设激光房,工位规划5台机器人,
1台机器人将侧围外板、前部加强框总成、流水槽总成上件至侧围外板总成定位工装上,定位工装采用四面体转台实现4车型柔性切换,上件后工装定位夹紧,机器人离开激光房并关闭房门,3台机器人进行激光焊(2台侧围门框激光熔焊和1台流水槽激光钎焊),完成后1台7轴机器人将侧围外板总成下线并进行人工焊缝检查。为保障激光焊每次都能准确地寻找到焊接起始位置,在焊接头的前端增加一套焊缝寻位系统。具体平面布置如图5所示。
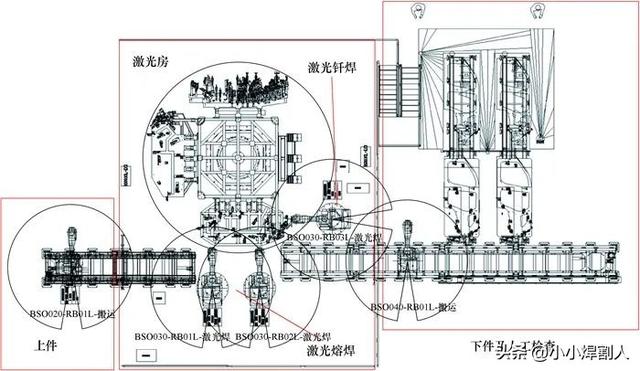
图5 侧围激光焊工艺布置方案
3.3 机器人涂胶工艺应用
(1)白车身焊装用胶 车身焊装常用胶为折边胶、点焊胶、结构胶、减震胶和双组份胶等,折边胶是用于车身钣金件折边结构的胶粘剂,主要应用于四门两盖及轮罩等包边位置。点焊胶是预先涂布板件焊接的搭接位置,点焊后填充板件缝隙,防止锈蚀,减噪,防止焊缝间隙漏水、通风、漏尘,保障车内环境,适用于车身点焊位置。减震胶用于减少车辆行驶过程中的噪声和振动,车身很多零件如门外板件、顶盖外板及侧围外板等外板件与内板件之间存在间隙,且无法通过焊点连接,将膨胀胶涂在两零件之间,其经过加热膨胀固化后,胶层具有较高的粘结强度。结构胶主要起到增强车身结构作用,还能够局部替代某些位置的焊点。双组份胶是两种胶通过一定比率混合,在室温下固化的结构胶粘结,主要应用外板包边位置,因其具有室温下固化强度高的特点,可以更好地防止包边后外板件窜动,避免影响总成精度[3,4]。
(2)新能源车身涂胶方案 车身涂胶方案一般有人工手动和机器人自动两种方式,如图6所示。随着汽车制造工艺及质量要求的不断提高,机器人涂胶应用越来越广泛,尤其是新能源汽车更需要采用机器人涂胶方案。主要体现在以下几个方面原因。

图6 人工及机器人涂胶布局
1)涂胶量大。新能源轻量化车身因其主要连接工艺为SPR、FDS冷连接工艺。单纯冷连接工艺强度相比焊接强度低,无法达到白车身强度、刚度要求,一般需要配合结构胶才能达到使用要求。通常SPR、FDS增加结构胶后的强度为单独连接强度的5~8倍,因而轻量化铝车身结构应用相比钢制车身在结构胶用量要增加近几十倍,普通钢车身结构胶长一般在5~10m以下,钢铝车身结构胶长在80~100m,全铝车身结构胶长近200m。
2)工艺要求高。为保证胶的覆盖率,同时避免溢胶对涂装电泳的影响,因而工艺对胶的直径、胶边距(胶距离板件止口边距离)、起止点等有明确的要求,由于通过人工涂胶有时难以保障质量,因此需要机器人系统来确保涂胶位置的稳定性和一致性。
3)质量要求高。因新能源车涂胶量大,对胶质量要求更高,涂胶质量不良会严重影响车身性能。采用机器人涂胶同时配合视觉检测系统,对胶条质量在线监控,可检测胶条位置、宽度、连续性,在胶枪工作时进行实时检测,不占用生产节拍,并且可以存储图像和数据,用于工艺分析和质量追溯,因而机器人涂胶能够更好地保障涂胶质量。
3.4 机器人搬运工艺应用
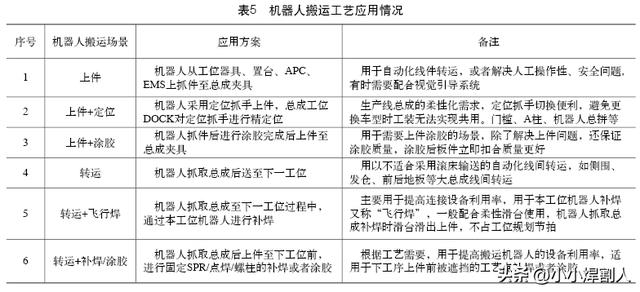
白车身生产过程中经常涉及冲压件、分总成及总成在同工位或不同工位间的搬运,因考虑操作性、安全性、柔性化、质量及节拍等工艺要求,需要采用机器人来搬运工件。
常见机器人搬运工艺应用情况见表5。
3.5 机器人检测工艺应用
机器人检测工艺主要指通过机器人携带视觉系统来检测工艺质量、工件位置、精度等,来达到某种工艺应用需求。常用的机器人视觉检测工艺主要有焊缝视觉检测、涂胶视觉检测、上件视觉检测引导、在线精度检测等。
(1)工艺质量检测 工艺质量检测包括对焊缝质量和涂胶质量的检测等。焊缝视觉检测主要应用于激光焊或弧焊,用于检测工件位置精度来确定焊缝位置从而实时匹配机器人的轨迹,或用于焊后焊缝质量的监控和追溯。机器人涂胶检测同样用于对涂胶质量的实时监控和质量追溯[5]。
(2)上件引导检测 视觉引导上件技术结合了视觉检测技术和工业机器人运动学原理,为机器人安装“眼睛”,突破机器人只能单纯地重复示教轨迹的限制,使其能根据被操作工件的位置变化实时调整其工作轨迹,准确抓取工件,直接提升整个车身制造过程的自动化效率。视觉引导上件相比传统人工上件、高精度料架上件具有明显的优点,三种上件方式对比见表6。

某新能源轻量化车型侧围外板上件考虑采用视觉引导上件方案,方案平面布局如图7所示。采用AGV将左右侧围工位料架送至库位,根据料架精度,可考虑机器人携带抓手直接对侧围外板L进行视觉拍照后抓件,或机器人携带抓手先对料架位置进行初步拍照寻位,再对侧围外板L进行二次视觉拍照后抓件。机器人抓取侧围外板L件后上至转台夹具,人工上尾灯板、流水槽、锁扣等小总成后夹具夹紧并旋转180°至焊接位对板件进行点定。机器人将焊接完成的侧围外板总成R从转台夹具上取下后并进行固定补焊后挂在EMS小车上。接着机器人重复从另一个料架里抓取侧围外板R,上件至转台夹具上,人工上小总成夹紧后,此时转台另一侧侧围外板总成L点定连接完成,转台旋转180°,机器人取侧围外板总成L至固定焊钳补焊后挂在EMS小车上,进入下个循环取侧围外板L。此方案最大程度提高视觉引导设备的利用率,实现视觉检测系统及抓手的共用,减轻人员操作强度,降低外板变形对精度的影响,同时四面体转台夹具可以满足2车型柔性化需要。

图7 侧围外板总成上件引导视觉方案
(3)在线精度检测 机器人在线精度检测主要包括对白车身各部件总成关键孔位精度在线检测及白车身总成间隙面差在线检测,典型在线精度检测应用方案如图8所示。从成本角度看,通常在车身总成两侧各安装1~2台机器人构成检测系统,一套完整的测量系统包括硬件和软件两个部分, 其中硬件部分包括:工业机器人、激光视觉传感器(测头)、测量计算机及图象处理系统、测量数据管理网络结构、电气控制系统等。软件部分包括:测量控制软件和数据管理与分析软件。测量过程为:当机器人接收到开始测量信号后,就按预先规划的测量路径带动视觉传感器运动,依次使视觉传感器到达被测点,由视觉传感器完成测量。测量结束后,机器人回到初始状态,并发送测量完毕信号。
a)车身精度检测 b)门盖间隙面差检测
图8 在线精度检测方案
4 结束语
车身轻量化是新能源汽车发展的必然趋势,车身轻量化的设计手段不断优化,轻量化材料的应用也越来越广泛。新能源车身由于采用轻量化铝合金材料,导致工艺变化,SPR及FDS等冷连接工艺因设备安全性及操作性必须要采用自动化连接,激光焊和铝点焊因职业卫生需要也必须采用机器人自动化方式。轻量化工艺需要结构胶配合才能更好保证车身强度及刚度,新能源轻量化车身涂胶量是传统车的几十倍以上,同时由于涂胶工艺质量要求的提高,也需要采用机器人涂胶。同时随着对工艺柔性化、自动化、质量等要求的提高,机器人搬运及在线精度检测也越来越普遍。因而,随着轻量化在新能源车身的发展及工艺要求的提高,自动化也是新能源车身发展的必然趋势。
参考文献:
[1] 王兰,王学敏,张宇.铝合金车身连接技术探讨[J].汽车与配件,2017(17):70-73.
[2] 焦建武.汽车车身焊装机器人工作站设计及应用[J].机械工程师,2012(1):126-128.
[3] 刘美娜.车身焊装涂胶工艺研究[J].汽车工艺与材料,2019(12):40-43.
[4] 陈媛媛,徐浩.汽车白车身焊装工艺用胶[J].汽车工艺与材料,2019(12):40-43.
[5] 赵亮.机器人激光在线检测技术在汽车焊装线上的应用分析[J].小型内燃机和车辆技术,2018,47(6):42-45.
相关参考
欧拉好猫的工厂位于江苏省泰州市,主要生产新能源汽车,这次趁着参加欧拉好猫的新车发布会,顺便来工厂参观一下。也是我第一次参观工厂,拍了很多照片,请大家慢慢欣赏。视频加载中...冲压车间全封闭冲压车间,车身钣...
欧拉好猫的工厂位于江苏省泰州市,主要生产新能源汽车,这次趁着参加欧拉好猫的新车发布会,顺便来工厂参观一下。也是我第一次参观工厂,拍了很多照片,请大家慢慢欣赏。视频加载中...冲压车间全封闭冲压车间,车身钣...
...连接以及车身的总成装配,其工作流程如下:1.首先,由机器人手臂抓取车身结构件(如前纵梁),然后通过机械臂将它们放入到相应的工位;2.接着,机器人手臂抓取覆盖件,并放入相应的工位。3.,机器人手爪抓起车身总成
...工人的流水,自动化激光焊接生产得到了厂家的青睐。而机械手激光焊接机智能化操作,搭配能够稳定回转的焊接变位机,能够实现灵活焊接,在面对不同规格工件的焊接工作中,机械手激光焊接机能够实现焊接精确部位,实行...
小编带您了解焊接机器人的含义,焊接机器人的特点、焊接机器人的结构组成以及焊接机器人的作用。什么是焊接机器人一、什么是焊接机器人焊接机器人是通过人工智能技术、传感技术、通信技术等制造出来的用于自动化焊接...
焊接机器人作为智能制造领域的机械设备,在工业自动化生产线得到了广泛的应用和普及。焊接机器人在进行焊接生产的过程中往往需要加装外部轴才能高效完成工件的焊接任务。外部轴的作用是与机器人本体相配合,使焊接工...
小编带您了解焊接机器人的含义,焊接机器人的特点、焊接机器人的结构组成以及焊接机器人的作用。什么是焊接机器人一、什么是焊接机器人焊接机器人是通过人工智能技术、传感技术、通信技术等制造出来的用于自动化焊接...
机器人焊接属于什么焊(实现焊接机器人自动焊接代替人工操作焊接,会有很好的发展)
...使得焊接工艺对于自动化、机械化的要求极为迫切,实现机器人自动焊接代替人工操作焊接成为几代焊接人的理想和追求目标。目前
焊接夹具设计思路(怎样打造一个完美的焊接机器人焊接工装夹具?)
...据时代来临,很多的焊接生产加工等工作都依靠使用焊接机器人或者机械臂来完成,对于企业来说有面临由手工向自动化焊接转型的需要或者是现有的自动焊接方式不够完善,其中涉及到的焊接夹具设计问题,下面向大家解读怎...
焊接夹具设计思路(怎样打造一个完美的焊接机器人焊接工装夹具?)
...据时代来临,很多的焊接生产加工等工作都依靠使用焊接机器人或者机械臂来完成,对于企业来说有面临由手工向自动化焊接转型的需要或者是现有的自动焊接方式不够完善,其中涉及到的焊接夹具设计问题,下面向大家解读怎...