焊接工装夹具安装要求(安川机器人虚拟仿真:机器人加工工件安装到工装夹具的三种方法)
Posted
篇首语:知识是工具,而不是目的。本文由小常识网(cha138.com)小编为大家整理,主要介绍了焊接工装夹具安装要求(安川机器人虚拟仿真:机器人加工工件安装到工装夹具的三种方法)相关的知识,希望对你有一定的参考价值。
焊接工装夹具安装要求(安川机器人虚拟仿真:机器人加工工件安装到工装夹具的三种方法)
概述
工业机器人生产线虚拟仿真前期布局工作,除了机器人安装底座、工装夹具、安全围栏、控制柜等周边设备在地面直接进行布局操作以外,还包括加工工件安装到工装夹具,以及机器人安装到安装底座。上一期,为大家介绍了圆形特征的机器人安装底座、方形特征的工装夹具地面布局的操作方法,本期再来为大家介绍一下加工工件安装到工装夹具。
在安川机器人虚拟仿真软件MotoSimEG-VRC中,工件安装到工装夹具的操作相对来讲还是比较简单的,操作方法大致可以分为三种:一种是直接导入安装法,另一种是改变父-子级关系安装法,最后一种是坐标移动安装法,以下分别详细介绍。
直接导入安装法
安川机器人虚拟仿真软件MotoSimEG-VRC实现工件安装的方法与FANUC机器人虚拟仿真软件ROBOGUIDE实现的工件安装的方法非常类似,都是事先要设定一个父级参考对象,并以这个父级参考对象作为安装基准进行工件数模导入与安装。
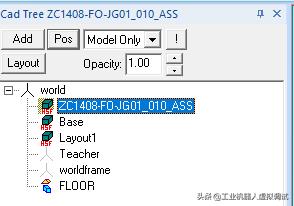
一般情况下,工件安装的父级参考对象都是工装夹具,因此这里首先要在左侧的数模浏览树Cad Tree中点选已经导入的工装夹具,使其高亮显示。
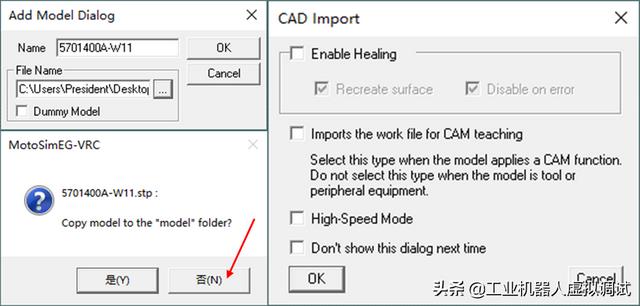
然后重复外部数模导入步骤,依次点击“add”工具按钮,选择要导入的加工工件数模。在是否复制原始数模到“model”文件夹提示框中点击“否”。在CAD Import对话框中设置数模导入参数,若是需要使用“CAM Function”功能,则需要勾选“Imports the work file for CAM teaching”选项;若是不需要使用“CAM Function”功能,那么直接导入即可。本例是机器人点焊焊接,因此不需要使用“CAM Function”功能。所有的数模导入参数设置如下图所示。
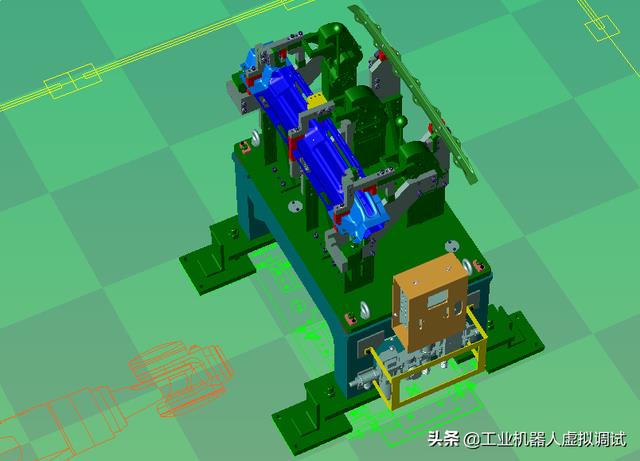
加工工件数模成功导入后,可以看到工件已经直接安装到了工装夹具上。
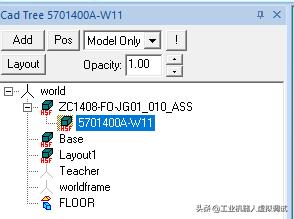
这个时候,在左侧数模浏览树Cad Tree中的工装夹具下出现了一个加工工件的资源节点,表示加工工件对象的导入/创建是以工装夹具为父级参考对象的。
说明:这种工件可以自动安装到工装夹具上的方法,它的关键一点是:加工工件与工装夹具的设计参考坐标系(装配参考坐标系)是同一个,并且已经完成装配操作。实现自动安装的原理:加工工件导入仿真软件后,由于它的父级参考坐标系是工装夹具,那么工件的布局参考坐标系(所有导入数模的默认布局参考坐标系都是自身的设计参考坐标系)将会自动与工装夹具的设计参考坐标系进行重合操作,由于二者的设计参考坐标系是同一个,所以工件就被自动安装到了工装夹具上。
改变父-子级关系安装法
改变父-子级关系安装法与直接导入安装法类似,这种方法在导入加工工件数模时不直接选择工装夹具作为父级参考对象,而是使用仿真软件默认的世界坐标系为父级参考对象。数模导入后,再通过改变父-子级关系的方式,使得工件自动安装到工装夹具上。
首先,在左侧的数模浏览树Cad Tree中选择世界参考坐标系world,然后重复上述工件数模导入步骤导入工件数模,此时工件将以世界坐标系为布局参考对象实现自动布局放置。
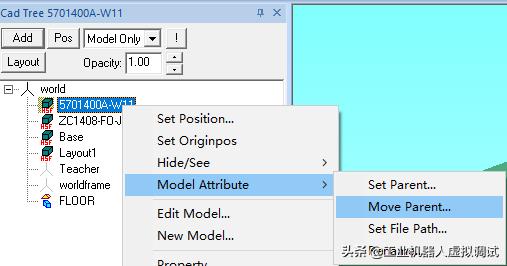
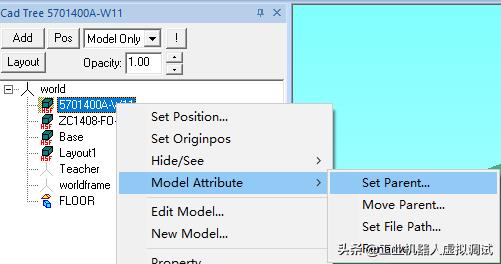
然后,在左侧的数模浏览树Cad Tree中选择工件资源节点,右击鼠标依次选择“Model Attribute”→“Move Parent”。
在弹出的Select Object对话框中,点选工装夹具资源节点为对象移动的父级参考对象,点击OK按钮。
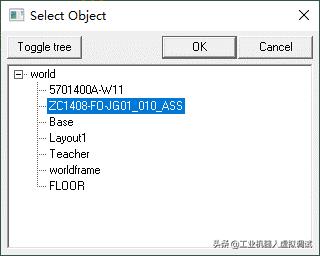
同样的,加工工件数模立即被自动安装到工装夹具上,并且数模浏览树Cad Tree中工件资源节点也移动到工装夹具资源节点下。
这种工件自动安装方法的关键点也是加工工件与工装夹具的设计参考坐标系(装配参考坐标系)是同一个,否则也无法实现自动安装。
坐标移动安装法
最后一种方法是针对加工工件与工装夹具的设计参考坐标系(装配参考坐标系)并不是同一个的情况,也就是工件无法自动安装到工装夹具上。
首先以世界坐标系为参考对象导入工件数模,数模导入后利用“Pos”工具手动移动工件到工装夹具上,使得工件的定位孔与工装夹具的定位销对齐。
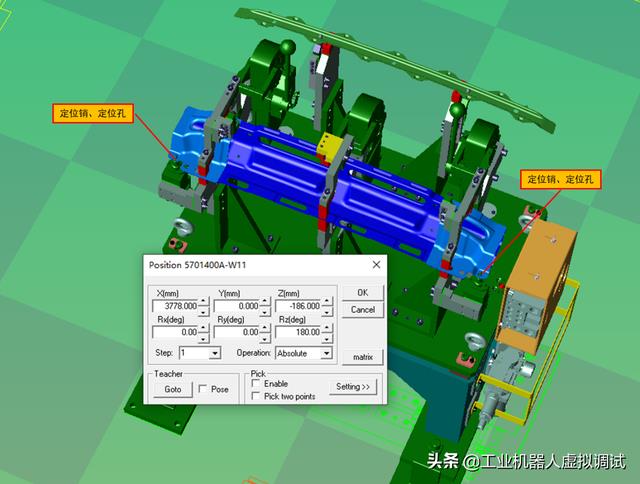
然后,再将工件的父级参考对象设定为工装夹具即可,设定方法如下图所示。
方法总结
以上三种方法都可以实现工件自动安装到夹具上,当然,这三种方法不只是适应于工件的自动安装,也适用其他有安装关系的设备或零部件的安装。其中,前两种方法适用于两安装对象的设计参考坐标系是同一个的数模,其中第二种方法更加适合需要导入更多具有安装关系的数模;第三种方法适用于所有具有安装关系的数模。除此之外,还有其他的安装方法,比如手动添加参考坐标系安装法、几何特征装配法等,但是这些方法由于使用起来极为复杂,因此不属于常用方法,这里也就不过多介绍了。
The End
上一篇:MotoSim EG-VRC软件:机器人仿真工作站外围设备布局方法介绍
相关参考
机器人上下料程序(DELMIA软件物流仿真:机器人输送带上下料虚拟仿真操作方法)
...少设备停机时间、提高自动化程度,很多情况下都是使用机器人进行上下物料。从本质上来讲,机器人上下料工艺就是一种物料的搬运操作,但是应用在不同的领域就会有不同的工艺要求。那么在使用DELMIA软件进行机器人输送带...
机器人上下料(ROBOGUIDE软件机床上下料虚拟仿真:机器人机床上下料配置与编程)
概述机床上下料是工业机器人较为广泛的一种应用,尤其是与数控机床相互配合,共同完成工件加工,可实现全程无人参与。几个月之前写过一系列ROBOGUIDE软件机床上下料虚拟仿真的文章,但是由于种种原因文章只更新到了数控...
数控车床上下料(ROBOGUIDE软件机床上下料虚拟仿真:机器人机床上下料配置与编程)
概述机床上下料是工业机器人较为广泛的一种应用,尤其是与数控机床相互配合,共同完成工件加工,可实现全程无人参与。几个月之前写过一系列ROBOGUIDE软件机床上下料虚拟仿真的文章,但是由于种种原因文章只更新到了数控...
焊接工装夹具(伊唯特讲解焊接机器人生产线的工作方法及工装夹具的设计)
以焊接机器人为主要设备,还可以形成焊接机生产线,可以方便地将多个工作站与工件输送线连接起来。尽管它们彼此相互作用,但该生产线仍然保持了单个站的特征。焊接机器人生产线中的每个工位只能使用所选择的工件夹...
焊接工装夹具(伊唯特讲解焊接机器人生产线的工作方法及工装夹具的设计)
以焊接机器人为主要设备,还可以形成焊接机生产线,可以方便地将多个工作站与工件输送线连接起来。尽管它们彼此相互作用,但该生产线仍然保持了单个站的特征。焊接机器人生产线中的每个工位只能使用所选择的工件夹...
焊接工装设计(焊接工装夹具设计及应用手册,上百页全是知识点无偿分享)
本书主要内容包括焊件的定位原理及定位器设计;焊接工装夹具;焊接工装夹具的动力装置;焊接工装夹具的设计方法;焊接变位机械,包括焊件变位机械、焊机变位机械、焊工变位机械的特点及应用;焊接机器人与焊件变位机械,以...
焊接工装设计(焊接工装夹具设计及应用手册,上百页全是知识点无偿分享)
本书主要内容包括焊件的定位原理及定位器设计;焊接工装夹具;焊接工装夹具的动力装置;焊接工装夹具的设计方法;焊接变位机械,包括焊件变位机械、焊机变位机械、焊工变位机械的特点及应用;焊接机器人与焊件变位机械,以...
焊接机器人操作规程1、旋开气体阀门;新瓶要放半分钟,防止有存水。2、进入机器人系统操作界面后,打开焊机电源;3、将控制柜上主开关旋至"ON"位置,控制器开启。4、对夹具的气路进行检查是否存在漏气等现象。5、...
焊接夹具设计思路(怎样打造一个完美的焊接机器人焊接工装夹具?)
...题,下面向大家解读怎样打造一个完美的焊接机器人焊接工装夹具?1、焊接机器人焊接夹具具有动作迅速、操作方便的特点,操作位置应处在工人容易接近、最易操作的部位。当机器人焊接夹具处于夹紧状态时,应能自锁。 ...
焊接夹具设计思路(怎样打造一个完美的焊接机器人焊接工装夹具?)
...题,下面向大家解读怎样打造一个完美的焊接机器人焊接工装夹具?1、焊接机器人焊接夹具具有动作迅速、操作方便的特点,操作位置应处在工人容易接近、最易操作的部位。当机器人焊接夹具处于夹紧状态时,应能自锁。 ...