激光点云数据处理软件(点云数据怎么生成三维模型?)
Posted
篇首语:人的天才只是火花,要想使它成熊熊火焰,哪就只有学习!学习。本文由小常识网(cha138.com)小编为大家整理,主要介绍了激光点云数据处理软件(点云数据怎么生成三维模型?)相关的知识,希望对你有一定的参考价值。
激光点云数据处理软件(点云数据怎么生成三维模型?)
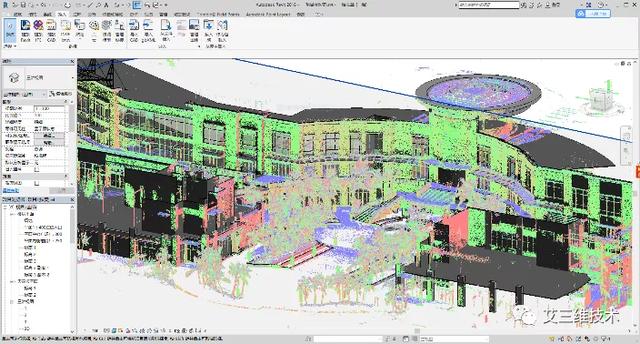
点云”(Point Cloud)简单来说,就是通过测量仪器在获取物体表面每个采样点的空间坐标后,得到的是一个点的集合。
通常使用三维坐标测量机所得到的点数量比较少,点与点的间距也比较大,叫稀疏点云;而使用三维激光扫描仪或照相式扫描仪得到的点云,点数量比较大并且比较密集,叫密集点云。
除此之外,根据不同仪器的工作原理,不同仪器得到的点云信息也不一致:
1.根据激光测量原理得到的点云,包括三维坐标(XYZ)和激光反射强度(Intensity)。
2.根据摄影测量原理得到的点云,包括三维坐标(XYZ)和颜色信息(RGB)。
3.结合激光测量和摄影测量原理得到点云,包括三维坐标(XYZ)、激光反射强度(Intensity)和颜色信息(RGB)。
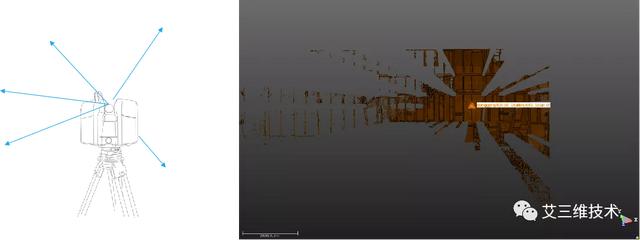
为了尽可能的获取更多点云信息,目前,大多采用三维激光扫描仪进行物体测量,三维激光扫描仪器可大面积、高分辨率、快速地获取物体表面各个点的(XYZ)坐标、反射率、颜色(R.G.B)等数据信息,为快速复建出1:1真彩色三维点云模型提供的一种全新技术手段。

Trimble X7 3D激光扫描仪
关于三维激光扫描仪的的详情,就不在这里叙述了,感兴趣的可以点击链接了解三维激光扫描仪详情:三维激光扫描仪的工作原理和六大技术特点
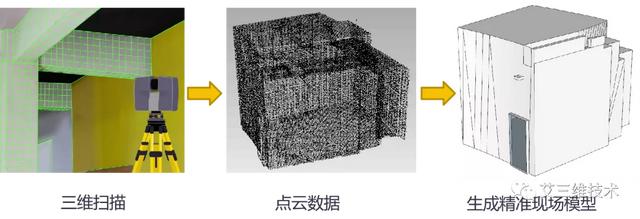
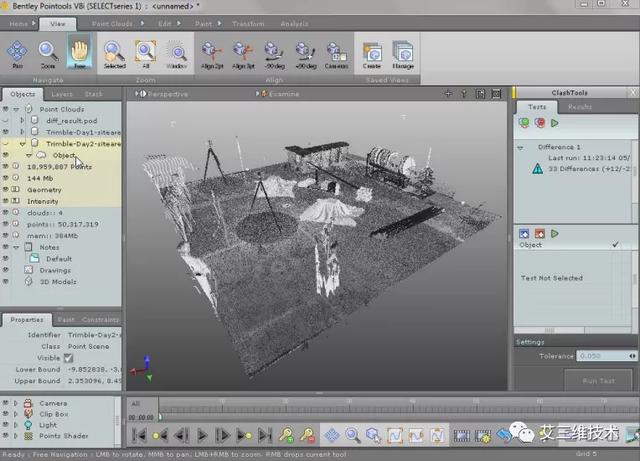
通过三维激光扫描仪或者其他测量仪器得到的点云,要如何生成三维模型?现阶段,点云数据生成三维模型,主要是通过点云数据处理BIM软件Bentley Pointools。
Bentley Pointools是一款功能强大的软件,用于编辑点云和创建点云交付成果,使用Bentley Pointools 能为您所有的基础设施项目处理点云。拥有Bentley Pointools,您可以:
- 高性能点云引擎
- 快速进行详图制作、以层为基础的编辑和数据细分
- 创建专业质量的图片、动画和影片
- 碰撞检测

软件核心技术
领先的点云引擎Pointools Vortex
Bentley Pointools 由行业领先的点云引擎 Pointools Vortex 提供支持,可支持大型点云。用户可以处理包含数十亿点的大型数据集,以交互方式管理场景参数并快速加载和卸载本地格式点云 POD 模型。您将体验到高性能传输与点云密度、清晰度和细节的最大视觉。
拥有 Bentley Pointools,您可以轻松导入和查看三种类型的对象:
- 点云,可从大范围的扫描仪导入
- 纹理三维模型,可从大量常用模型格式中导入
- 二维 CAD 制图,可从 DXF,DWG 和 SHP 文件格式导入
软件功能
创建动画、视频和漫游场景
通过呈现任何大小的快照,生成高分辨率的平剖图和透视图。使用输出标尺、刻度和定位来设置图像大小和刻度,以便能够准确重复利用。充分利用基于时间的、直观逼真的漫游场景和对象动画系统,轻松快速地生成电影。
从点云中检测冲突
将点云数据值扩展至您的设计流程中。无论您是在使用 Bentley 的 Navigator,还是 Descartes 产品,均可在决策流程中利用现实世界数据和建议设计之间的冲突检测。
区分点云
自动标识对象之间的差异。您可以比较同一区域中的两个点云,并标识数据中出现的任何增减。使用差异工具可检测更改,并随时监控建筑工地的进度和其他管理项目。
编辑点云
使用点层技术编辑点云的大型数据集,实现无与伦比的编辑速度。在 128 个层之间移动点,隔离要详细编辑的区域。操作、清理或细分点云模型,以便清洁和丰富点云模型,使其更易于重复利用。

使用高达 128 个图层,可以轻松地锁定、重命名、保存和删除层。利用 LAS 分类并基于点云创建层
处理与可视化大规模点云数据
利用高性能显示技术,处理并可视化具有数以亿计的庞大数据点集。可视化点云通过多种细微渐变选项,使视觉诠释更加简便。
对点云进行批注
向点云添加注释,确保项目的每位参与者拥有最新信息,能够远程审查现场,并且可以准备现场操作。
如果您对三维激光扫描仪或者点云数据处理软件Bentley Pointools感兴趣,欢迎联系我们。
关注“艾三维技术”微信公众号,看直播!免费获得BIM软件7天免费试用和12个BIM软件系列教程,还有精彩案例,BIM解决方案,定期发送!
相关参考
...系统通过扫描目标物体,可以获得海量的高精度空间三维点云数据,单点精度能够达到毫米级,并具有真实的色彩信息,获取的点云模型能够充分表达目标物体的三维特征信息。根据不同的需求,通过对点云数据的分析和处理,...
...系统通过扫描目标物体,可以获得海量的高精度空间三维点云数据,单点精度能够达到毫米级,并具有真实的色彩信息,获取的点云模型能够充分表达目标物体的三维特征信息。根据不同的需求,通过对点云数据的分析和处理,...
植被模型制作植被模型制作就是基于倾斜摄影和激光点云生产的Mesh模型提取,转换生成植被模型,赋予对应植被纹理。植被模型应分为面模型、块模型和点模型。(1)对于林地、农田、草地、小区绿地、公共绿地、绿化植被等...
...光扫描仪、航摄仪甚至智能手机拍摄得到的照片、视频和点云数据,都能通过三维实景建模技术创建成三维实景模型。通过倾斜摄影+三维实景建模技术创建的三维模型,除了能被放大、缩小、移动、多角度观看外,与普通的三...
激光扫描仪的精度(影响三维激光扫描测量精度的因素-成都远石)
...影响三维激光扫描测量精度的因素有很多,主要有硬件、软件和系统误差三个方面。硬件方面:包括平台、摄像机、激光器等。这种误差主要是由于设备本身制造精度,零部件的老化破损等机械结构导致的误差,解决办法是
激光扫描仪的精度(影响三维激光扫描测量精度的因素-成都远石)
...影响三维激光扫描测量精度的因素有很多,主要有硬件、软件和系统误差三个方面。硬件方面:包括平台、摄像机、激光器等。这种误差主要是由于设备本身制造精度,零部件的老化破损等机械结构导致的误差,解决办法是
...仪对物体进行扫描形成点云数据,通过点云数据进行三维软件的建模。中科院广州电子技术有限公司科教与智能制造事业部自主
...达传感器能够获取丰富,稠密且精确的三维空间中物体的点云数据,这可以帮助自动驾驶车辆实现定位和障碍物的跟踪,lidar也将成为实现完全自动驾驶的核心传感器。本篇文章将主要介绍三维激光雷达在自动驾驶定位领域最新...
...达传感器能够获取丰富,稠密且精确的三维空间中物体的点云数据,这可以帮助自动驾驶车辆实现定位和障碍物的跟踪,lidar也将成为实现完全自动驾驶的核心传感器。本篇文章将主要介绍三维激光雷达在自动驾驶定位领域最新...
...彩真实的三维数据模型,可以以10帧/秒的帧率快速抓取3D点云数据。支持特征拼接和标记点拼接两种拼接方式,支持彩色纹理扫描,可生成彩色3D模型用于3D打印。Revopoint三维扫描仪内置的高性能3D计算芯片和出色的算法,即便搭...