激光3D轮廓传感器(深入了解3D激光三角测量(1)——激光成像系统的配置方法)
Posted
篇首语:大多数人想要改造这个世界,但却罕有人想改造自己。本文由小常识网(cha138.com)小编为大家整理,主要介绍了激光3D轮廓传感器(深入了解3D激光三角测量(1)——激光成像系统的配置方法)相关的知识,希望对你有一定的参考价值。
激光3D轮廓传感器(深入了解3D激光三角测量(1)——激光成像系统的配置方法)
随着随着智能制造时代的逐步迈进,机器视觉产业逐渐被大家所重视,机器视觉产品以其高精度、高效率、数据互联与替代人工的优势,持续的在为整个社会提供着巨大价值。
基于3D三角测量技术的机器视觉系统就是其中一个分支,其中包括线激光轮廓传感器,焊缝跟踪传感器等等,它们被广泛的应用于汽车生产、电子制造等各个领域中的产品尺寸检测、焊缝跟踪、工件轮廓测量、机器人轨迹引导等诸多使用场景当中。
虽然使用三角测量的基本概念很简单,但在设计此类系统时仍需要解决诸多问题。其中就包括如何配置基于激光的3D三角测量系统以及如何指定激光线参数。
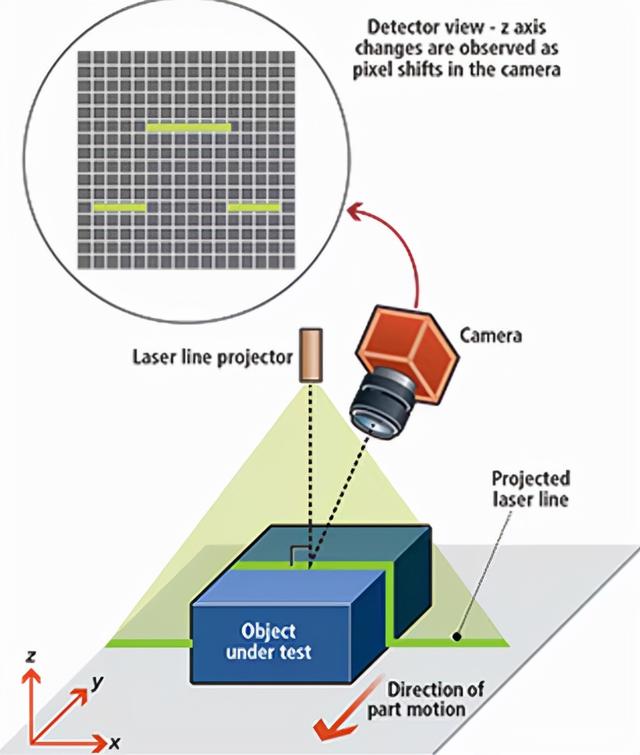
图 1: 当从线光源以外的其他角度观看时,投影的激光线看起来会失真。 这种失真用于推导出被测物体的尺寸。
在一套激光三角测量系统中,投射到物体表面上的线激光会产生一条明亮的投影线,从激光源以外的观察角度来看,这条亮线会根据物体轮廓形成一定失真(图 1)。 然后我们便可以通过对这些线条的形状分析来实现对象表面形状的精确几何重建。
3D三角测量系统一般由四个主要部件构成,他们分别是相机、基于激光的线结构光、能够在视场中对物体或者成像系统实现位移的平台或导轨,以及处理图像并将像素偏移转换为高度差的软件系统。
激光成像系统的配置
3D三角测量中的激光成像系统在实际应用中可以通过几种不同的方式来实现,每种方式都有其独特的特点和优劣。 比较常见的四种配置方式如图 2 所示。
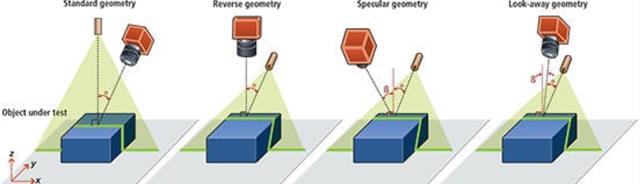
图 2:基于 3D 三角测量的机器视觉系统的四种常见配置。
一、最常用的标准配置是,激光线垂直于标称测量 (x, y) 平面投影。 这种配置最重要的特性是物体沿投影线的高度变化不会导致线的 y 坐标值发生变化。 这简化了导出物体形状所需的后续计算,从而使系统在设置期间更快、更准确且更易于校准。这种方法的一个缺点是相机必须要以一个角度去观察对象,这使得它必须增大自身的景深以便于在物体高度变化时保持对焦。
这也意味着随着物体高度(以及与镜头的物体距离)的变化,镜头会经历更大的放大倍数,因此,必须校准测试对象才能从系统中获得准确的测量结果。 除此之外,这种配置也有一些其他的弊端,比如可能存在的遮挡:当相机以非垂直角度观察物体,由于没有物体本身完全平坦,所以投影线的某些部分会被挡在相机的视野之外,这导致在设计上必须进行权衡,因为随着相机角度的增加,测量分辨率和可能的遮挡都会随之增加。
二、如果我们切换激光源和相机的位置,则能够提供比上述标准配置更高的高度分辨率,因为激光照明的斜角意味着物体高度的变化会导致激光线位置的更大偏移。 由于相机垂直于测量平面,因此在此配置中对象不会被遮挡。 但是与之相对的,零件高度的变化却会导致投影线的 y 坐标发生变化,从而使结果变得更加复杂。 因此,此设置通常被设计用来测量平面对象。
三、第三种配置是:激光和相机都与表面成相似的非法线角度(接近镜面反射角)。 这种配置能够提供更高的分辨率。 然而,在这种布置中,相机可能会看到来自激光的镜面反射或近镜面反射,如果这些反射在检测器中产生饱和或光晕,就可能会导致测量错误。 当然,这一特点也可以被反向利用,如果需要测量的对象是深色物体且表面光滑,我们可以通过这种配置来提高反射率,以弥补在其他配置中深色物体因为反射率不足导致不容易被测量的问题。
四、最后一种配置目前也被广泛使用:相机和线激光都放置在物体表面法线的同一侧。 这给了人们将相机跟线激光实现集成的机会,常见的3D激光轮廓传感器,以及焊缝跟踪传感器都是采用这一方法。同时,这种配置也极大地减少了镜面反射的机会,除非对象具有高度纹理。 当然,这一定程度也降低了分辨率,因为相机与投影仪的角度太过接近,而且这也有可能导致一些遮挡。
当然,还有其他可能的方法来配置基于激光的 3D三角测量视觉系统,但这些都是刚刚描述的四种基本典型配置的变体,替代方法通常会继承这些配置的基本特征,相当于它们的一种派生。

长春新产业激光用于3D三角测量的线激光器
长春新产业激光致力于为3D三角测量系统提供专业且质量稳定的线激光源,能够为各位系统搭建商提供最适合的成像系统配置建议,并提供与之贴合的线激光方案,目前新产业激光的线激光产品已经在3D激光轮廓传感器,焊缝跟踪传感器以及其他3D三角测量系统中被广泛使用。如有线激光源需求,或需了解更多3D激光三角测量的信息,可联系CNI长春新产业激光的3D成像专家寻求沟通建议。

新产业激光总部
相关参考