滚子轴承和滚珠轴承(减速器行业专题报告:对比Atlas看人形机器人商业化可能性)
Posted
篇首语:丈夫欲遂平生志,一载寒窗一举汤。本文由小常识网(cha138.com)小编为大家整理,主要介绍了滚子轴承和滚珠轴承(减速器行业专题报告:对比Atlas看人形机器人商业化可能性)相关的知识,希望对你有一定的参考价值。
滚子轴承和滚珠轴承(减速器行业专题报告:对比Atlas看人形机器人商业化可能性)
(报告出品方/作者:浙商证券,程兵、邱世梁、田子砚)
1 分析波士顿动力 Atlas 高成本来源看人形机器人商业化可能性
波士顿动力 Atlas 机器人出色的运动性能为未来商用服务型人形机器人树立标杆。波士顿动力 Atlas 展现了全球最前沿的人形机器人科研进度,可以跑酷、后空翻、跳舞、使用工具。其研发目标是“超越人”。Atlas 机器人以复杂的 AI 算法、多模态视觉感知和高性能电液驱动系统实现优异运动性能,但百万美金的高昂成本限制了商业化进程。特斯拉以电驱替代液驱,旨在实现人形机器人的产品标准化、低成本和可量产。特斯拉人形机器人使用电驱作为动力系统,优化关节数目降低静坐和快走的功耗,将FSD、Dojo芯片、纯视觉系统等自动驾驶技术迁移至人形机器人,优先运动控制算法研究。电驱有望替代液驱实现高运控性能,低成本优势驱动打开消费市场。电液驱动在惯量比、响应速度、力密度等方面具备显著优势,而伺服电机系统通过电机性能迭代、精密减速器优化等途径,未来有望在各项指标上实现突破,且目前国内外厂商及科研院所在各环节均发力突破。考虑到电驱在成本、维护、体积重量等方面均优于液驱,未来将是商用人形机器人的不二选择。 人形机器人将持续迭代,特斯拉 Optimus 商业前景可期,我们预计3~5 年内可以提升电驱系统至 Atlas 当前水平,人形机器人商用有望迎来爆发式成长。人形机器人运控模块的迭代升级也将打开视觉感知、精密减速器市场空间,建议重点关注谐波减速器、RV减速器和激光雷达方向。
1.1 离线轨迹优化和在线模型预测控制为Atlas 步态算法核心
人形机器人的步态及平衡控制具有较高技术难度。人形机器人在移动时只受自身重力和地面作用力两方面外力,但机器人只能通过控制关节驱动力来控制步态,带来了研发的极大难度。 环境感知:Atlas 通过 TOF 深度相机(15 帧/秒)生成环境点云,集合测量数据。使用多平面切割算法在环境点云中提取表面,并将输出的数据输入到地图系统建立模型。
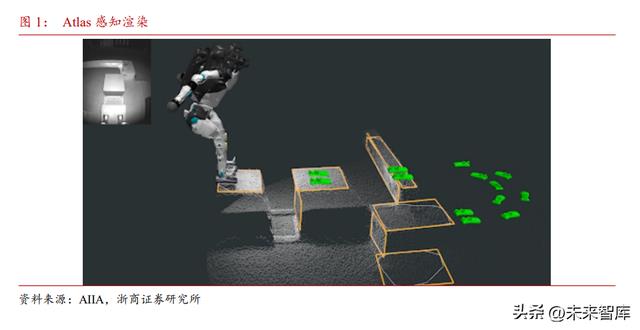
TOF(Time of Flight)深度相机,增加了像素 Z 轴的景深信息,也被称为3DTOF。给目标发送连续光脉冲,通过传感器接收物体反射光,计算发射和反射时间差或相位差,来换算目标距离以及深度信息,再结合传统相机拍摄,以不同颜色代表不同距离的地形图方式呈现目标的三维轮廓。 特斯拉人形机器人感知视觉技术为自动驾驶纯视觉系统的迁移,发展相对成熟,具商业化规模成本优势。特斯拉视觉模块采用处理原始信息的神经网络,即纯视觉系统。借鉴Google Transformer 模型,搭建 HydraNet 神经网络模型,优化视觉算法。它获取密集的视频数据,将其压缩到 3D 向量空间。实时处理摄像头传输的图像,转换为向量信息。形成所需要的全部三维空间信息,包括线条、边缘、路沿、交通指示、交通灯、位置、方向、深度、速度等。
人形机器人步态算法种类繁多,以波士顿动力的 MPC(Model Predictive Control)算法最为先进。模型预测控制(MPC)最早应用于自动驾驶。Atlas 团队负责人Scott Kuindersma表示,Atlas 的 MPC 算法有离线和线上两部分。 首先根据 Centroidal Dynamics(能够将人形机器人欠驱动的自由度和关节速度映射成质心速度的模型)通过离线算法进行轨迹优化,优化出 Library of Template Behaviors(行为模板库),在线上算法部分采用高效 MPC 使用机器人动力学模型来跟踪相应步态,输出作用力、落脚位置和时间等参数。 轨迹优化离线设计模板是Atlas行为执行的来源。研究人员更新行为库里的轨迹和功能,捕捉重要发力点。跳马和后空翻是 Atlas 全身复杂行为优化设计的很好例证。MPC 可以实现实时反馈。MPC 可以在线调整行为时间,通常用于保持平衡、调整触地时间等。对于舞蹈动作,可以使用该模型来跟踪所需的 BPM(每分钟拍子数)并与音乐合拍。

特斯拉 Optimus 步态算法中规中矩,与 Atlas 步态算法结构类似,目前可以保持平衡。特斯拉将捕捉的动作可视化处理,形成“关键帧”。并对人形机器人的躯干、手和腿等部位的位置做详细的关键帧分析,将数据映射回机器人身上,实现轨迹优化。预计随时间推移特斯拉将搜集更多数据建立更具可用性的轨迹优化行为库,并通过在线动作调整实现 Optimus 更多灵活行为。
1.2 液驱以更高力密度促成 Atlas 优异性能,电驱为未来商业化趋势选择
Atlas 包含 28 个液压驱动器来提供动力。驱动器为充满加压流体的气缸,以很大的力驱动活塞。定制伺服阀优化设计演变的更小、更轻。Atlas 内部由流体管线连接液压驱动器。如果管线断裂,红色液压流体会流出。 液驱历史悠久,波士顿动力在液驱方面专利布局广而深。Atlas 进行一系列研发降低液压系统的能耗,使得动力系统取得更高效率。 1) 规划人形机器人理想双足运动轨迹。波士顿动力机器狗由于能量多次转换和多环节传递产生能耗高的问题,Atlas 设计足式机器人前行中理想足部轨迹,以降低液压驱动能耗。
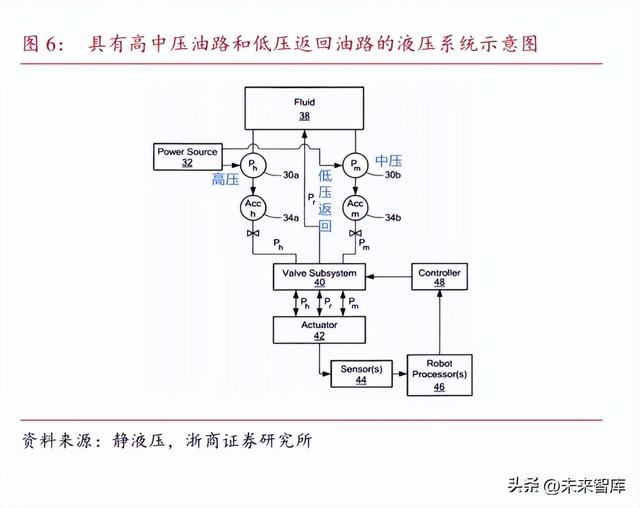
2) 通过切换控制器和设计不同压力油路的液压系统供给不同功率。为Atlas 在不同场合供给不同功率以降低功耗。波士顿动力在专利US20100090638A1 中根据传感器检测力,通过控制器控制阀进行开关,按照不同情景切换高低功率模式。并于专利US20120291873A1 中设计了具有高、中压油路和低压返回油路的液压系统。
3) 采用以液压驱动为主的电液一体化方式提供动力。Atlas 背着蓄电池和微型液压动力站,通过判断关节承受的负载类型和大小选择合适的液压或电动制动器,使得机器人的功率消耗最低。 液压驱动为离散力,电驱动为连续力,两种方式互补形成期望力,达到最佳驱动效率。Atlas 做后空翻等动作时,采用液压驱动更加安全,避免过大冲击引发电机爆炸。 4) 波士顿动力还布局了液压系统的稳定供压能力提升、不同压力组合、分阶段提供液压、延长液压零部件工作寿命、加快阀的响应速度等方面的专利。这些专利都有助于液压系统运行更加高效,减少功耗。
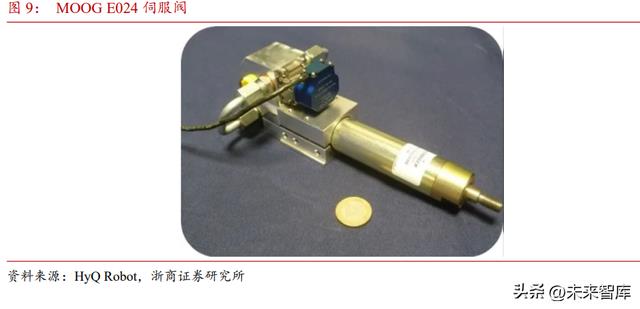
电驱对比液驱主要劣势在于力密度,电驱目前在人形机器人领域无法完全取代液驱。与 Atlas 不同的是,特斯拉人形机器人采用电驱。液驱依靠流体动力,可以在狭小空间实现密集解决方案。电力驱动通过电磁场产生电磁力,其单位质量作用力(力密度)目前只有液压驱动器的十分之一。德国力士乐电液驱动器驱动力可达200-250 吨,体积相似的电驱只能达 29 吨。 更大的力密度带来人形机器人更优质的运动性能。液压驱动力密度更大,响应速度更快,爆发力和控制力更好,运动更加平稳。波士顿动力副总裁Aeron Saunders 表示Atlas用电驱可以跳 3 英尺(约 0.9 米),用液驱可以跳 6 英尺(约1.8 米)。Atlas 采用液压驱动方案,其响应速度很大程度上取决于电液伺服阀的频率响应指标。Atlas 采用 MOOG 公司的航空伺服阀作为主控制阀,频响接近1000Hz,即Atlas 可在接近1ms 的时间内对运动指令做出响应。伺服电机的频率响应功能反映在速度环周期和瞬态响应曲线这两个指标上,核心指标为伺服电机的频带宽度,目前日本安川的高性能伺服电机频带宽度可达到 1kHz,即电机响应时间达 1ms,与液压驱动非常接近。
液压驱动器更大的惯量使得人形机器人运动更加平稳。液压驱动的惯量比电驱要大,能够承受跑步、跳跃等运动过程中的瞬时大负载,伺服电机自身惯量较小,受到外部大惯量输入时容易对电机工作造成反作用,影响工作平稳性。 电驱由于易于维护、低成本、零件规整更加有利于商业化。以 Bigdog 为例拆解液压系统:波士顿动力机器狗采用水冷二冲程内燃发动机作为动力源,通过发动机驱动液压泵,提供约 11.19kW 的功率。高压液压油通过过滤器、歧管、蓄能器和其他管路被输送到腿部执行器。热交换器用于冷却液压油,散热器用来冷却发动机以便持续运行,液驱系统还包括检测油压、油温和流量等传感器。目前人形机器人电驱方案主要采用伺服电机、伺服驱动器和编码器共用构成伺服系统。伺服系统用于准确控制输出的机械位移转角、位移速度和加速度等,满足机器人各部位各种运动方式的需求,且电机驱动的成本要低得多。
由于力的限制,目前电机普遍通过增大转矩和转速来满足更高功率需求,加入稀土元素减少惯量以提升响应性能。功率=转矩×速度=力×半径×角速度。可以通过增加电动机的半径来增加转矩,或提升转速来满足功率的需求。根据盖世汽车研究院,目前18,000rpm的电机已逐渐量产,未来将进一步朝 20,000rpm 以上发展。新南威尔士大学研发的高速电机每分钟超 10 万转,峰值功率密度可达 7kW/Kg。加入稀土元素,可4 倍提高材料磁饱和强度,减小转子惯量,提升电机响应性能。 电驱在工业机器人和军事领域逐步取代液驱。工业机器人领域,FANUC电驱超重负载机器人,负载为 1700 kg,重复精度+/-0.27mm。军事领域,俄罗斯苏-57 战斗机使用电驱系统代替液压系统,用电缆代替液压管道,避免使用易燃有毒液体;提升战斗机生存性,电缆易于备份,防止一处损坏导致全驱动系统崩溃。 我们认为未来 3~5 年内,随着电驱系统功率密度和响应速度的不断提升,特斯拉使用电驱在性能上可以媲美液压驱动。
功率密度方面,特斯拉目前国产电机供应商为台湾富田电机,其低惯量交流感应伺服电机系列产品额定转速为 1000-3000rpm,功率为 37-190kW。随着直流空心杯电机(因为无铁芯转子,体积和质量较普通电机减少 1/3-1/2)和高速电机的发展,更高转速和更小体积的电机预计将被引入人形机器人产业链,Atlas 液压动力单元HPU 的功率密度为5kW/5Kg。新南威尔士高速电机研究员表示高速电机(7kW/Kg)推广到特斯拉电动车需要6-12个月,预估如果特斯拉想采用高速和高精度微特电机,3 年内可以适配到人形机器人产业链。响应速度方面,目前特斯拉电动车 Model 3 两个电机的扭矩切换相应时间只需要10ms,目前市场上已经存在响应速度(1ms)接近液压驱动的安川伺服电机。同时随着转子材料的进化,电机的响应性能将进一步提升。 平稳性方面,伺服电机增强平稳性的核心解决方法是通过减速器减小外部输入,实现对原动机的减速增矩。
1.3 电驱方案确定性强,精密减速器成为人形机器人核心零部件
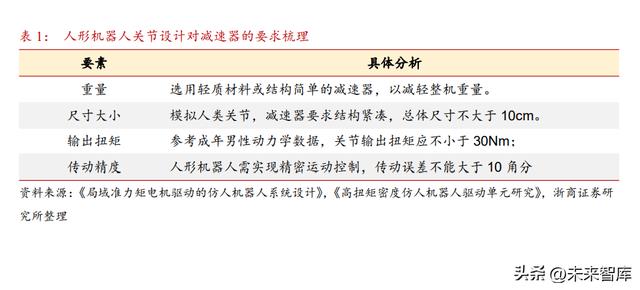
减速器连接动力源和执行机构,具有匹配转速和传递转矩的重要作用。设备由于不适宜用原动机直接驱动,减速器可将传动设备在高速运转时的动力,通过齿轮比传动(输入轴上的小齿轮啮合输出轴上的大齿轮)或是差齿传动(由于输入端和输出端齿轮数量差异产生减速),达到降低转速和增大扭矩的目的。 人形机器人关节数量多,结构复杂,对减速器的精度、体积重量、减速性能等均提出很高要求。考虑人形机器人要模拟人类的运动模式,需要具备高精度、高稳定性的特点,且由于整机重量过大会增大机器人动力负担,减速器也必须尽可能轻量化。因此我们认为,在人形机器人的膝关节、髋关节等大关节处,RV 减速器具备良好的应用前景;而在小关节处,谐波减速器是最优解决方案。
2 谐波减速器:体积小精度高,满足人形机器人小关节要求
2.1 利用少齿差减速原理,谐波减速器可实现高精度运动控制
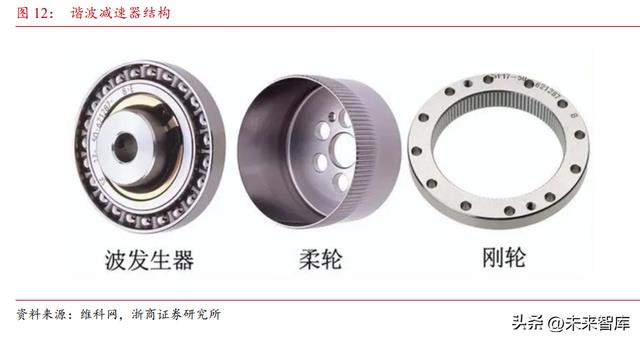
谐波减速器由波发生器、柔轮和刚轮三大部分构成。相比于传统的减速器,谐波减速器以独特的三元件结构,在紧凑轻便的结构中实现高减速比,并具备零背隙、高扭矩和高定位精度的优点。谐波减速器三个基本部件分别为波发生器(Wave Generator)、柔轮(FlexSpline)和刚轮(Circular Spline): 波发生器:由一个专门设计的薄滚珠轴承组成,该轴承安装在椭圆轮毂上,通常用作输入并连接到伺服电机。 柔轮:由合金钢制成,呈薄圆柱形杯状,开口端有外齿,径向具备较大的弹性,工作过程中柔轮呈椭圆形。 刚轮:带有内齿的刚性环,工作过程中与柔轮外齿相啮合。
谐波减速器利用新型传动理论,利用少齿差原理实现精密减速控制。柔轮直径略小,且齿数比刚轮少两个。波发生器的椭圆形状使柔性齿轮的齿在椭圆长轴上的两个相对区域与刚轮啮合。波发生器每旋转 180 度,柔轮由于齿数的差异,会相对刚轮反方向前进一个齿。因此波形发生器每带动柔轮工作一周,柔轮将相对刚轮从其原始位置旋转两个齿的角度,从而实现减速,减速比为刚轮齿数与刚轮和柔轮齿数差的比值。
谐波减速器具备高精度、结构简单等优势,应用范围广泛。谐波减速器的各项优势,使其在医疗器械、光伏设备、半导体设备等领域均有应用前景。(1)传动精度高:谐波减速器工作过程中齿轮传动装置多齿在180 度对称位置同时啮合,啮合齿数占比可达 30%,因此齿轮齿距误差和累计齿距误差对旋转精度的影响较为平均,可得到极高的位置精度和旋转精度。 (2)减速比大,传动效率高:谐波减速器齿轮传动的基本减速比为30~320,额定负载输出时的传动效率可达 65%~96%,显著优于普通齿轮传动装置。(3)结构简单,寿命长:谐波减速器的体积和重量约为普通齿轮传动装置的1/3,且在工作过程中啮合齿数多,轮齿单位面积应力载荷小,运动冲击小,轮齿磨损小,使用寿命更长。 (4)轮齿间隙小,传动平稳,安装方便:谐波减速器通过特殊的齿形设计使得柔轮和刚轮的啮合过程实现连续性的渐进和渐出,消除齿面滑移速度突变,保证传动的平稳性和低噪声。同时谐波减速器可根据使用需求,选择波发生器、柔轮和刚轮中作为输入和输出的环节,获得不同的减速和加速比。
2.2 材料、齿形、轴承等决定减速器性能,国内厂商加速技术进步
谐波减速器作为技术密集型行业,技术壁垒高。从谐波减速器相关技术的专利申请看,可以分为总体结构、柔轮、刚轮、柔性轴承、齿形等 10 个分支,其中近年来国内外厂商在减速器结构、波发生器、柔轮和加工工艺这几个方面加大研发力度。我们认为,材料、齿形和轴承工艺是决定谐波减速器性能的核心环节,随着国内厂商近年来不断加大自主研发力度,产品性能显著提升,国产化替代正在加速进行中。
2.2.1 特殊运动模式决定谐波减速器材料特殊,柔轮材料要求高于刚轮
作为谐波减速器传动减速的核心部件,柔轮和刚轮的材料要求特殊。其中柔轮由于其特殊的运动模式,对材料提出更加严苛的要求,国内厂商从材料选用、提纯工艺等入手,不断提升谐波减速器性能,缩小与国外头部厂商的差距。
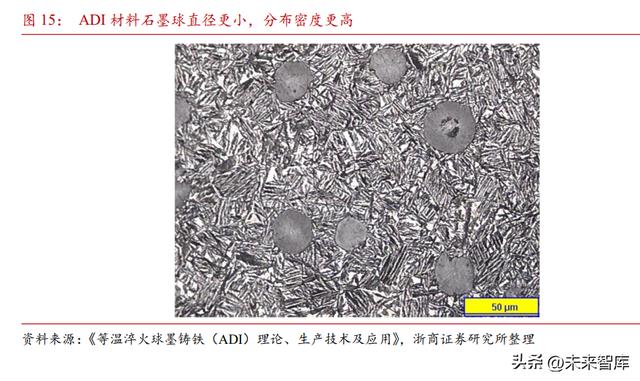
刚轮材料实现国产替代,国内 ADI 材料性能超越球墨铸铁。刚轮是谐波输出圆周运动的载体,在与柔轮啮合的过程中具备减磨抗磨特性。刚轮材料的选用上,以日本哈默纳科为代表的国外厂商普遍采用球墨铸铁,球墨铸铁具备切削性能好、自润滑、导热好、比重小等优势,长期以来都是保证减速器寿命的最佳选择。 国外对原材料技术严密控制,我国自主研发突破壁垒。国内通过产学研联合研发,对超细密 ADI(等温淬火球墨铸铁)材料进行改良,取得谐波减速机专用的自润滑ADI 材料。ADI 材料在高硬度切削性能、石墨球直径及分布密度、服役温度区间等方面均优于传统球墨铸铁,为国内谐波减速器原材料选择开拓了一条新的道路。
柔轮工作模式特殊,材料需求特殊,对杂质成分要求严苛。谐波减速器工作过程中,柔轮不断变形,并且要同时承受弯曲和扭转两种应力,长时间运转容易导致柔轮疲劳断裂,从而造成谐波减速器失效,影响使用寿命。 谐波减速器柔轮疲劳断裂主要经过生核、扩展与断裂三个阶段。裂纹一般都在表面形成,然后向内部扩展,选择的材料最好使其既不易生核又要使裂纹扩展速率最低,使裂纹扩展到更大范围时才进行最后断裂。在实际应用过程中,柔轮筒体的疲劳断裂和齿面磨损较为普遍,因此柔轮材料需要满足扭转刚度高、耐磨性好等特点。
柔轮材料以 40Cr 合金钢为主,国外提纯技术高杂质少,国内通过技术革新缩小差距。目前,国内外的谐波减速器柔轮材料基本为 40Cr 合金钢,其中40CrMoNiA与40CrA最常用,但由于原材料中含有的杂质会导致微小裂纹进而影响使用寿命,因此对原始胚料的纯度要求极高。目前国外提纯技术较高,因而材料相比国内的杂质少,我国经过多年研发,通过对原材料进行高精密的电渣重熔提纯,反复旋压等技术手段,提高了柔轮材料各项性能指标的稳定性,保证了柔轮疲劳强度的苛刻要求。
2.2.2 齿形设计决定啮合效果和载荷能力,国内具备自主专利打破壁垒
齿形设计决定谐波减速器啮合效果、传动平稳性和工作寿命。一方面,谐波减速器工作过程中,柔轮轮齿在啮合过程中受到扭转应力,增大同时啮合的齿数比例可以降低齿面应力,提升柔轮扭转刚度从而延长使用寿命。另一方面,特殊的齿形设计可延长轮齿啮合区域,优化减速器工作过程中的啮合效果,减小轮齿背隙,进而实现平稳的传动效果。日本哈默纳科自主开发 S 型齿轮齿形,优化齿轮啮合效果。它具有S 齿形独有的特殊曲面,可与齿形连续接触。通过根据齿轮齿厚加宽齿槽宽度和扩大底部半径来缓解应力集中,减少刚轮与柔轮切齿的摩擦系数;工作过程中有 30%齿数同时啮合,有效均化传动误差,提高传动精度。此外,齿根半径的增大提升了轮齿强度,降低启动力矩的同时减少温升效能,可实现谐波减速器高扭矩、高扭转刚度、长寿命和平稳旋转。

国内绿的谐波深耕谐波减速器行业,自研“P”形齿,打破齿形设计国外垄断。绿的谐波基于对谐波传动理论的深入理解,跳脱出传统的渐开线齿轮设计理论,率先打破日本哈默纳科垄断,开发出具有自主知识产权的 P 型齿,通过降低齿高、增大齿宽降低轮齿的断裂风险;P 型齿设计使得谐波减速器在工作过程中柔轮变形量较小且更多的轮齿同时参与啮合,降低齿面比压,延长工作寿命。 来福谐波自研δ齿形,可显著提升谐波减速器性能。来福谐波在双圆弧齿形基础上自主研发设计齿形,具有接触应力小、寿命长、啮合性能好、噪音低、工作平稳的特点。公司官网产品性能数据显示,LSG 系列产品工作寿命较标准产品的寿命可提升30%以上,转矩容量提升超过 30%。
2.2.3 交叉滚子轴承成为主流选择,多方向载荷能力优势显著
谐波减速器波发生器轴承要求承受径向和轴向应力,交叉滚子轴承相比传统滚珠轴承优势明显。谐波减速器利用柔性轴承可控的弹性形变传递运动和动力,工作中轴承随柔轮的弹性变形不断的发生变化,不仅承受循环应力载荷,而且承受交变应力载荷。传统滚珠轴承仅能承受一个方向上的应力,且难以满足谐波减速器结构紧凑和高精度的要求,因此交叉滚子轴承成为更优的替代方案。
交叉滚子轴承可起到有效支撑及减少摩擦的作用,同时承受径向负荷、轴向负荷及力矩负荷等多方向的负荷。交叉滚子轴承的滚动体一般采用圆柱或者圆锥滚子在单一滚道槽里边呈十字交叉相互排列形式,滚子之间通过黄铜保持器或者工程塑料隔离块间隔起来,从而具有较高的旋转精度、较大的承载力、较小的外形尺寸及较高的旋转速度和刚性。

材料与热处理成为柔性轴承核心问题,绿的谐波率先打破国外垄断。谐波减速器工作过程中轴承同时承受随球体的压力和高速运动的变形。材料过软易导致沟道受损,过硬则轴承容易断裂。2020 年绿的谐波获得交叉滚子轴承专利,成为国内第一家具备独立生产能力的减速器企业。
2.3 对标日本哈默纳科发展,看好国内厂商在技术、产能等方面奋起追赶
哈默纳科(Harmonic Drive)作为全球谐波减速器行业绝对龙头,业务遍布全球,产品应用场景广泛。哈默纳科目前主营业务可分为精密减速机(谐波减速器、减速器组件和行星减速器)和机电一体化(执行器和控制器)两个板块,产品广泛应用于工业机器人、半导体设备、面板制造设备、机床、光学仪器、检测设备、车载等领域,下游行业工业机器人占比超 50%。
对标哈默纳科发展历程,近年来以绿的谐波为代表的国内厂商从产能建设、产品升级和多样化、机电一体化三个方面不断迭代,看好谐波减速器国产化替代加速进程。(1)产能建设,哈默纳科多年积累优势显著,国内厂商发力布局加速追赶。哈默纳科起步于日本市场,经过多年发展逐渐向欧美及亚洲其它国家布局,在全球需求增长的背景下持续提升产能,迅速抢占市场份额。截至 2022 年 3 月,哈默纳科在谐波减速器领域的产能已经达到每月 18.5 万台,同时产能还在持续提升中,公司官网数据显示,预计到2023年3月谐波减速器产能将达到每月 25.5 万台。
国内谐波减速器厂商加速产能建设,有望提升市场份额。近年来国内谐波减速器厂商扩产速度明显快于国外。绿的谐波年产能已从 2020 年上市前的9 万台增长到2021年底的30 万台,并设定了 50 万台的年产能目标。内资品牌纷纷发力建设产能,随着技术迭代推动产品竞争力提升,有望加速渗透下游市场推进国产化替代进程。

(2)国产谐波减速器在产品丰富程度上较海外巨头仍有差距,看好厂商提升产品性能与扩充产品矩阵双管齐下,加速国产替代。哈默纳科持续迭代产品和技术,产品向高精度、高转矩容量、小型化和轻量化发展,相较于国产产品更在小型化和精细化的应用场景优势更加显著。 质量决定产品竞争力,应用场景决定发展空间。国内谐波减速器厂商要想进入下游厂商供应链,需要经历约 1~2 年的试机过程,耗时较长并且未能通过导致的损失较大。因此厂商必须加大技术研发,提升产品的性能从而得到与更多下游客户的合作机会。
除机器人外,哈默纳科的成长还有半导体、面板等下游赛道的放量成长。不同应用场景对谐波减速器产品的使用要求都不一样,包含精度、扭矩、体积、适用环境等维度。因此,面对不断变化的下游市场,需要不断开发新产品,以适应不同的应用场景需求。
3 综合行星和摆线传动优势,RV 减速器承担大关节角色
谐波减速器使用存在局限性,RV 减速器在人形机器人大负载关节的地位无法取代。谐波减速器无法承载大负荷主要有两个原因:一是瞬时传动比不稳定,由于谐波减速器柔轮在启动/制动阶段轮齿易发生弹性形变,输入端与输出端的瞬时位移比值不稳定,在大负载的情况下易出现滑齿现象;二是部件共振问题,谐波减速器部件固有振动频率与其材料特性和扭转刚度相关,在大负载情况下减速器更容易产生共振问题,影响工作寿命。RV 减速器在工业机器人领域已有成熟应用,看好其在人形机器人场景继续发挥重要作用。RV 减速器体积大,负载能力和刚度高,可用于机座、大臂、肩部等重负载位置,而谐波减速器体积小、传动比和精密度高,主要应用于小臂、腕部或手部。
3.1 RV 减速器多级传动,具备大负载、工作平稳等优势
RV 减速器实现多级传动,具备大负载、工作平稳等优势。RV 减速器与摆线针轮减速器同源,主要有摆线针轮和行星支架组成。结构包括输入轴、行星轮、曲柄轴、摆线轮、针齿轮和行星架,目前 RV 减速器多采用两级摆线针轮减速机构。
RV 减速器结合行星传动和摆线传动两种形式,是由第一级渐开线圆柱齿轮行星减速机构和第二级摆线针轮行星减速机构两部分组成,为一封闭差动轮系。第一级结构基于正齿轮变速原理,由行星齿轮和太阳轮实现变速,传动比即为两种齿轮的齿数之比;第二级结构采用差动齿轮变速,曲轴在行星齿轮驱动下回转时,偏心轴将驱动RV齿轮摆动,并迫使针轮与输出法兰之间产生相对回转,与谐波减速器类似,当曲轴旋转一周时,针轮只发生1个齿的偏转,从而实现第二级的减速。

RV 减速器减速比大、刚性好,但结构复杂且体积较大。RV 减速器由于其二级传动特点,可以实现更大的传动比和更高的输出转矩,且针轮和RV 齿轮间采用直径较大的针齿销传动,刚性更高。同时,由于 RV 减速器结构非常复杂,在传动间隙、定位精度方面不及谐波减速器。
3.2 RV 减速器结构复杂,技术壁垒较高,关注国内创新打破垄断
RV 减速器结构复杂,由数十个甚至上百个零件组成,在传动精度、效率、回差的指标上要求较高。RV 减速器核心难点在于各项工艺的密切配合,包含齿形设计、齿面热处理、加工精度、成组技术等等,由于结构复杂和零件众多带来的误差累积会导致产品在使用过程中的加速磨损和寿命缩减。
RV 减速器传动比大,负荷大,对轴承要求高。摆线轮支撑轴承位于曲柄轴和摆线轮之间,受限于减速器内部的空间、润滑、温升等因素,受力时易达到承载极值,导致磨损和破裂。摆线轮支撑轴承性能和 RV 减速器的寿命关联紧密。
RV 减速器齿形复杂,传统渐开线、摆线齿形修型工艺要求高,未来有望被双弧线齿形替代。与谐波减速器柔轮刚轮啮合类似,RV 减速器齿轮的齿形几何精度和修型质量都直接决定了减速器的传动效率和传动精度。为了弥补零部件制造和装配过程中产生的误差,需要通过等距修形、移距修形和转角修型这三种方法优化齿廓,并且要选择合适的修形量,在避免出现传动干涩、卡死等情况的同时尽量减小啮合齿隙。双弧线齿轮啮合效果更好,加工难度较低。双弧线齿轮在齿面接触强度和轮齿弯曲强度方面均优于渐开线齿轮和摆线齿轮。在加工工艺上,切制双圆弧齿轮仅需具有凸、凹齿廓的一把滚刀,测量时只测凸齿齿形上的公法线长度,因此测景仪器和公法线长度计算都大为简化。目前双弧线齿轮已被证实,加工精度良好的情况下在高、中、低速大功率动力传动中,都显示出良好的性能。

3.3 日系主导 RV 减速器市场,国内自研叠加全球机器换人创造发展机遇
日系主导全球 RV 减速器市场,国内厂商起步较晚。据MIR 数据,2021 年国内RV减速器市场中,纳博特斯克占据 53%份额,国内厂商中双环传动和中大力德市场份额分别为14%和 4%。我国于上世纪 80 年代才开始研究 RV 理论,起步较晚,目前仍处于追赶阶段。
国内厂商产能与自主研发双加速,全球机器换人趋势催化发展机遇。以双环传动为代表的国内 RV 减速器厂商发力追赶,在减速器动力学研究,在齿形设计、传动精度和回差控制等方面持续积累。并且受益于全球市场放量成长,内资厂商已逐渐获得试机验证和批量化生产的机会,未来有望逐步进入下游客户供应链。
4 关注人形机器人环境感知和运动模块投资机会
我们再次强调本文开头的观点,波士顿动力 Atlas 机器人具备优异的运动性能,可作为未来 C 端人形机器人产品运控性能方面的发展目标。支撑Atlas 实现这一功能的是先进的AI 算法、多模态的视觉感知模组以及高性能电液驱动系统。特斯拉擎天柱机器人,为贴近 C 端消费市场,采用了低成本的纯电机驱动方案,在运动表现方面存在一定差距。但我们经过深入分析认为,随着AI 算法的持续迭代、包含激光雷达在内的多模态视觉感知模组在智能驾驶和机器人等领域渗透率不断提升,以及电驱系统性能的不断提高,人形机器人有望在 3-5 年内,实现 Atlas 机器人的运动性能,打开C端消费市场空间。
动力输出环节,建议关注精密减速器赛道投资机遇。为实现Atlas 电液驱动的良好性能,除了伺服电机本身的升级外,需要精密减速器协同配合,优化机器人关节在扭矩、稳定性、惯量比等指标,因此应用在小关节上的谐波减速器和大关节上的RV 减速器需求空间有望打开,细分赛道的优质公司有望受益行业成长。 环境感知环节,重点关注激光雷达为主的传感器投资机遇。Atlas 采用TOF深度相机+激光雷达方案、特斯拉采用纯视觉方案实现环境感知。我们认为激光雷达在景深信息获取、目标运动信息获取和定位精度等方面均具备无法替代的优势,且考虑其在自动驾驶领域应用的确定性,未来有望应用在人形机器人领域,可参考自动驾驶赛道寻找优质投资标的。
4.1 围绕谐波和 RV 减速器国产化替代寻找优质投资标的
4.1.1 绿的谐波,国产谐波减速器龙头,有望受益人形机器人带来的广阔增量空间
绿的谐波深耕谐波减速器领域近 20 年,率先打破国外技术壁垒,实现国内大规模生产应用。目前主营业务包括:谐波减速器及金属部件、机电一体化产品及液压产品,客户覆盖国内外知名机器人厂商。 公司持续研发投入,在谐波减速器多个环节实现技术自主。绿的谐波自研独特的P齿形设计,打破国外在齿形设计上的技术垄断,近年来陆续获得交叉滚子轴承、三次谐波减速器结构设计等专利,在技术领域形成公司护城河的同时,持续提升加工工艺及产品性能。目前产品覆盖了新松、埃斯顿、优必选、Universal Robots(优傲)、Kollmorgen 等国内外知名客户和制造商。 公司构建多元化产品矩阵,着力布局机电一体化方向。公司除减速器产品外,经营金属部件及液压产品,公司持续推进产品机电一体化进程,迎合下游制造商对零部件采购、安装效率等需求,将伺服系统、谐波减速器、传感器集成模块,为客户提供更为标准化的解决方案。其中液压产品喷嘴挡板式电液伺服阀、机器人用电液伺服驱动关节(EHA)等均为谐波减速器产品的配套产品。 相较于工业机器人,人形机器人负载要求低,精度要求高,自由度更多,因此对谐波减速器需求量大。我们认为随着人形机器人商业化进程加速,出货量放量增长带动谐波减速器需求上升,公司基于核心技术、产能等优势,有望受益行业发展。

4.1.2 双环传动,国内精密齿轮行业龙头,布局 RV 减速受益国产替代进程
机加工精密齿轮行业头部企业,逐步发展成为国内 RV 减速器龙头。公司主营业务是机加工精密齿轮,深耕赛道三十余年,并逐步开拓新能源、工业机器人领域,产品主要应用于乘、商用车和工程机械,以及少量摩托车和电动工具等,是当前齿轮行业龙头企业。积极转型新能源赛道,公司迸发成长新动能。近年来公司积极开启新能源汽车齿轮转型发展步伐,成功实现新能源化转型。2021 年,公司新能源齿轮销售收入5.86亿,占公司乘用车齿轮销售额的 24%,覆盖主要新能源汽车生产厂商和电驱动供应商,并基本完成新能源齿轮产能扩张。 长期布局积累技术优势,RV 减速器打开公司成长空间。公司于2012 年开始聚焦工业机器人赛道,布局 RV 减速器业务。公司凭借在高精度齿轮领域的技术积累和竞争优势,在RV 减速器齿形设计、材料、机加工工艺等方米持续迭代,至2021 年占据国内RV减速器市场 14%份额,仅次于日本纳博特斯克,成为国产龙头。 相较于工业机器人,人形机器人对准 C 端市场,潜在整机需求量巨大,有望带动有望RV 减速器需求空间。我们认为公司作为国产 RV 减速器龙头,未来有望受益工业领域“机器换人”和人形机器人商业化进程加速,实现业务加速成长。
(本文仅供参考,不代表我们的任何投资建议。如需使用相关信息,请参阅报告原文。)
精选报告来源:【未来智库】。
相关参考
lKO交叉滚子轴承是在内外圈之间,按照正交方式配置滚子的结构紧凑型轴承。能够同时承载径向负荷、轴向负荷以及力矩等复杂的负荷。此款轴承广泛应用于产业机器人、机床、减速机及医疗设备等的旋转部位。lKO可以根据客户...
lKO交叉滚子轴承是在内外圈之间,按照正交方式配置滚子的结构紧凑型轴承。能够同时承载径向负荷、轴向负荷以及力矩等复杂的负荷。此款轴承广泛应用于产业机器人、机床、减速机及医疗设备等的旋转部位。lKO可以根据客户...
排球柱箱体排球柱排球(风电轴承行业专题报告:风电轴承竞争力+市场空间几何?)
(报告出品方/作者:天风证券,李鲁靖、朱晔)1轴承行业概况:本土企业规模较小,国内市场集中度低1.1轴承:支撑机械旋转体,降低摩擦的部件轴承的定义:轴承是在机械传动过程中起固定、旋转和减小载荷摩擦系数的部件...
旋转轴承(鸿骏精密机械:转台轴承和交叉滚子轴承在使用中优缺点对比)
交叉滚子轴承中,由圆柱滚子在呈90°的V形沟槽进行滚动面上可以通过网络隔离块被相互垂直地排列,因此1个交叉滚子轴承企业就可直接承受径向、轴向运动负荷及倾覆负荷等多方向的负载。其内外圈的尺寸被最小时间限度地小...
数控回转工作台有哪两种(交叉滚子轴承与传统轴承相比较,有哪些优点?)
...承行业也在翻天覆地的变化。从性能方面,高精度的交叉滚子轴承已经在很多方面取代了传统轴承的使用。高精度的交叉滚子轴承在很多方面的使用中的表现,都是优于传统轴承,现在就对比一下交叉滚子轴承与传统轴承都有哪...
满装滚子轴承(满装圆柱滚子轴承推荐厂家-临清市哈里轴承有限公司)
...业生产销售特种轴承的现代化公司。主要生产SL满装圆柱滚子轴承、滑轮轴承、减速机轴承、CARB圆环滚子轴承、机床轴承、绝缘轴承、挖掘机轴承、叉车轴承、交叉滚子轴承、机器人轴承、陶瓷轴承、印刷机轴承等及各种非标轴...
满装滚子轴承(满装圆柱滚子轴承推荐厂家-临清市哈里轴承有限公司)
...业生产销售特种轴承的现代化公司。主要生产SL满装圆柱滚子轴承、滑轮轴承、减速机轴承、CARB圆环滚子轴承、机床轴承、绝缘轴承、挖掘机轴承、叉车轴承、交叉滚子轴承、机器人轴承、陶瓷轴承、印刷机轴承等及各种非标轴...
机械配件有哪些分类(工业机器人轴承是个什么鬼到底有多少个轴?分类及应用)
...机器人轴承主要包括薄壁轴承、交叉圆柱滚子轴承、谐波减速器轴承和关节轴承等,但主要是交叉滚子轴承。焊接机器人关节中的交叉滚子轴承结构特点:圆柱滚子在轴承内外圆滚道内相互垂直交叉排列,单个轴承就能同时承受...
特种非标轴承(满装圆柱滚子轴承推荐厂家-临清市哈里轴承有限公司)
...业生产销售特种轴承的现代化公司。主要生产SL满装圆柱滚子轴承、滑轮轴承、减速机轴承、CARB圆环滚子轴承、机床轴承、绝缘轴承、挖掘机轴承、叉车轴承、交叉滚子轴承、机器人轴承、陶瓷轴承、印刷机轴承等及各种非标轴...
特种非标轴承(满装圆柱滚子轴承推荐厂家-临清市哈里轴承有限公司)
...业生产销售特种轴承的现代化公司。主要生产SL满装圆柱滚子轴承、滑轮轴承、减速机轴承、CARB圆环滚子轴承、机床轴承、绝缘轴承、挖掘机轴承、叉车轴承、交叉滚子轴承、机器人轴承、陶瓷轴承、印刷机轴承等及各种非标轴...