涡流式传感器测量位移(基于负反馈理论的信号调理电路设计)
Posted
篇首语:知识是为老年准备的最好的食粮。本文由小常识网(cha138.com)小编为大家整理,主要介绍了涡流式传感器测量位移(基于负反馈理论的信号调理电路设计)相关的知识,希望对你有一定的参考价值。
涡流式传感器测量位移(基于负反馈理论的信号调理电路设计)
在零中频雷达接收系统中,回波信号与本振信号混频之后得到中频信号。通常,中频信号的大小与回波信号的强弱有直接关系,回波信号强,中频信号的幅值就大,回波小则中频信号的幅值就小[1]。通常中频信号会使用ADC进行采集,将模拟信号采集为数字信号,再进行数字信号处理[2]。对于多普勒测速雷达来说,系统要求信号幅度应尽量平稳,处理起来就会精度变高,如果信号幅值变化不均匀,有用信号太小的部分就会被视为噪声处理[3-4],从而对处理结果产生影响。本文从负反馈的角度出发,采用AD603进行自动增益控制,实现信号调理的功能。
1 负反馈
反馈可分为负反馈和正反馈。负反馈是系统的输出通过某种方式对输入产生作用,使系统输出与系统目标的误差减小,系统趋于稳定;而正反馈则相反,正反馈使输出起到与输入相似的作用,使系统偏差不断增大,使系统振荡,可以放大控制作用。在电路中,正反馈通常用于频率的产生;负反馈用于提高系统稳定度,拓宽放大器通频带。
自动增益控制要求系统的增益能够稳定在一定的范围内,而负反馈能够满足该要求。在自动增益控制系统中,如果使用压控增益的放大器,首先需要在使用过程中对该系统设置一个目标点,即目标信号的输出幅值。当信号幅值大小超过目标点就可以减小系统的放大倍数;反之,当输出信号幅值小于目标信号幅值时则增加系统的放大倍数。这就是负反馈的思想,负反馈是系统通过不断地调节放大倍数从而使输出尽可能稳定地保持在所设置的目标值周围。
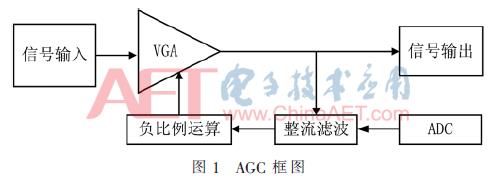
图1为本设计所用系统结构的原理框图,信号输入之后通过可变增益放大器进行放大,然后通过整流滤波之后得到一个直流信号,将直流信号再反馈到可变增益放大器的增益控制段,实现负反馈。
2 电路设计
电路设计分为精密全波整流、自动增益控制和反馈系统三个部分,通过这三个部分实现对30 mV~4 V,100 kHz~500 kHz小信号的调理。
2.1 精密全波整流
整流即把交流信号变为单向脉动信号,如果能把微弱的交流信号转换为单向脉动信号,则称为精密整流或精密检波[2]。最常见的整流方式就是使用四个二极管组成的桥堆进行全波整流,如图2所示。
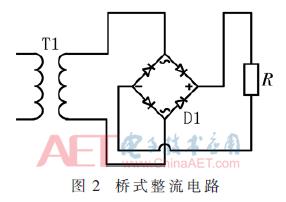
对于桥式整流,由于信号需要将二极管导通,导通二极管需要以牺牲信号幅值为代价,同时,二极管的使用会导致更多的噪声引入,由二极管的伏安方程可知:
其中IS是二极管反向饱和电流,VT是一个量纲为电压的与温度有关的物理量。
由于二极管的非线性特性,在信号通过二极管后会有高次谐波的产生,对后级信号处理会存在影响;此外,二极管的导通压降会使信号在幅值小于导通压降时出现截断的情况,从而出现新的频率成分,对信号处理产生影响[5-6]。
因此,选用无二极管的精密整流电路。电路图如图3所示。
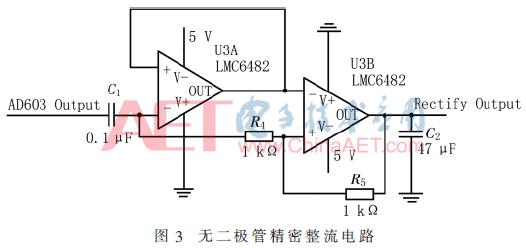
使用LMC6482进行精密整流,LMC6482是一款双运放芯片。图3所示电路的原理是利用LMC6482单电源供电只能输出正电平的原理,使用两级运放,前一级用作电压跟随器,后一级作为运算放大器。前一级的输出即为半波整流的结果,当信号输入为正电平时,前级输出与输入相同,当信号输入为负电平时输出为0。后一级用作加法器,加法器的表达式如式(2)所示:
其中U-与前级跟随器的输入相同,UO为后级输出信号,UP为前级跟随器信号输出。整个无二极管精密整流电路的表达式如式(3)所示:
经过仿真,无二极管精密整流电路能够实现电路功能,且输出信号不会有损耗。
2.2 自动增益控制
自动增益控制是整个信号调理电路中最重要的一环,特别是对于信号变化范围较大的信号。幅度较小的信号不太方便采集,所以需要对信号进行放大,将信号放大到合适的幅值再进行采样。而幅值较大的信号则需要将信号衰减到合适的幅值之后再进行采集。对于本设计,需要采集的信号从30 mV到5 V不等,而现在的AD采集芯片通常能够采集的电源为3.3 V。在设计中,将目标放大电平确定为3 V。
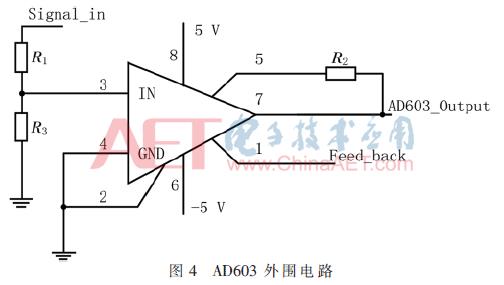
增益的改变通常使用可变增益的运放对增益进行调节,可变增益放大器通常分为电压控制可变增益运算放大器、程控可变增益运算放大器以及有具体挡位的运算放大器。本设计选用AD603作为压控可变增益运算放大器,这是一款低噪声线性分贝增益运算放大器。芯片内部功能可分为两部分,第一部分是压控衰减部分,第二级是固定增益放大部分。压控衰减部分先根据控制电压将信号进行相应衰减再将信号传至第二级进行放大。其增益通过芯片的1、2管脚进行控制,电压控制电平为-1.2 V至2 V,其中,在-0.5 V至0.5 V之间具有良好的线性性质。在90 MHz带宽下,外接反馈电阻为0时,运放可提供增益-11 dB,在反馈电阻为无穷大时,增益为31 dB;在9 MHz带宽下,增益为9 dB~51 dB[7]。
2.3 反馈系统
理想情况下AD603的输出为峰值为3 V的信号,经过全波整流之后,信号全部变成幅值为正的信号。
全波整流后,使用电容对信号进行滤波,整流得到的信号为一个有纹波的直流信号,通常情况下,电容的容值越大,电容充放电速度越慢,纹波也就越小。经过滤波后的信号被送至反相比例运算放大电路,如图5所示。
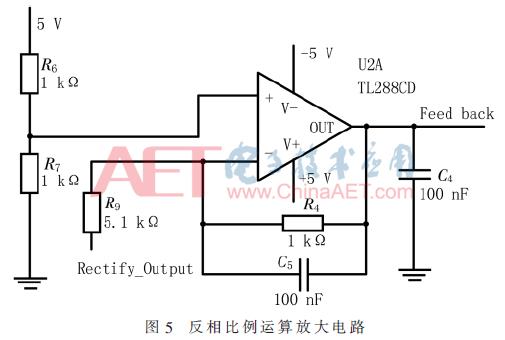
参数设置可根据实际电路进行修改。反相比例运算放大电路的表达式为:
UO与AD603的1脚相连,即增益控制段的同相输入端。至此,硬件电路的设计完成。
3 仿真与调试
3.1 仿真
在Multisim14中,对电路运行仿真,得到结果如图6所示。图6为系统输入电压与输出电压之间的关系,可以看到,从30 mV开始,输出电压就能达到2.7 V以上。
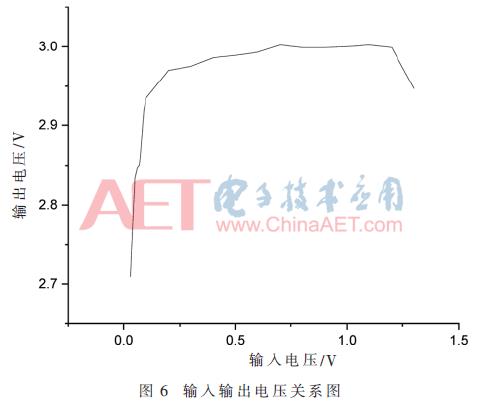
图7可知,从输入电压1.4 V开始,输出信号就开始出现失真,从谐波抑制的角度来看,1.2 V之后,谐波抑制大大下降,如图7所示,意味着二次谐波的功率上升,信号出现失真的情况。所以还需对电路参数进行修改。

通过在AD603信号输入端加上衰减网络之后以及对反馈电阻和反相比例运算放大器的斜率、截距、零点等参数的修改,通过变换电阻值的方法,找到最适合本设计的元件参数,信号调理能够使输出信号既不失真,又能不会太小,从而方便后级ADC的采集。
3.2 实物调试
利用Altium Designer软件设计电路,并做得实物。实物图如图8所示。
最初进行测试时,如果按照之前仿真的电路参数进行测试,电路将达不到要求,电路实际参数调节根据输出信号与输入信号的关系来进行判断,然后主要调节反相比例运算放大器的斜率以及截距,使电路达到要求。
测试环境如图9所示,使用信号发生器作为调理的输入信号,直流电源为电路提供电压±5 V,示波器用于观察输入输出信号波形以及AD603的增益控制电压波形。

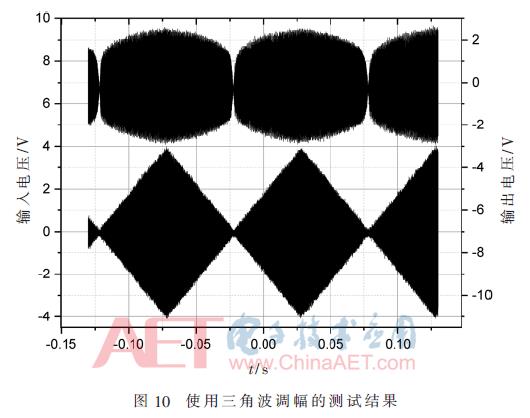
使用信号发生器产生一个调幅信号作为电路的输入,使用三角波作为调制信号,调制深度100%,调制频率10 Hz;正弦波作为载波信号,载波信号幅值约为8 V峰峰值,频率为500 kHz。输入和输出波形如图10所示,图中面包状信号为输出信号,对应右边的纵轴,菱形信号为输入信号,对应左边的纵轴。从图中可以看出,输出信号的包络与输入信号并不一致,放大倍数是非线性的。相对于输入信号,输出信号上升迅速,当上升到某一个值之后信号幅值变化变得缓慢,实现了自动增益控制的功能。此外,从图中可以看出,在输入小信号幅值缓慢上升时,输出信号被迅速放大。实际测试结果如图9所示。经过测试,自动增益控制系统的输出信号峰值从0 V上升到1 V所用的时间仅需要1.12 ms。
最后对最大幅值处的信号进行测试,经过测量,在输入峰峰值为8 V的信号时,输出最大峰峰值为5.09 V,而且没有出现失真的情况,如图11所示。
4 结论
本文根据负反馈的思想,设计出一个信号调理电路,设计完成之后,使用计算机仿真软件Multism14对电路进行设计仿真,然后使用Altium Designer绘制出PCB版图,经过加工和焊接得到实物。最终经过调试,电路的实际参数与仿真仍然有一定出入。对仿真经过实际调试,电路的功能达到预期,能够实现信号的自动增益控制。
本设计不足的地方在于增益调节所需时间较长,从开始到输出稳定幅值的信号需要约2 ms,对于一些应用来说该稳定时间较长。例如,对于弹目交会这样的场景来说,交会时间非常短,通常也就几毫秒,在这几毫秒中,信号将从非常微弱到非常大,使用本设计的电路可能会因为增益调节所需时间较长造成最终信号的失真。下一步将考虑使用单片机检波后使用DAC来控制AD603的放大倍数这样的话响应时间应该会相对短一点[8],而且应该能实现更加精确的放大倍数控制。
参考文献
[1] 孟博,王文廉.动爆环境下的多增益冲击波存储测试系统设计[J].电子技术应用,2017,43(9):83-86.
[2] 刘亚茹.无线通信应用自动增益控制电路的研究与设计[D].杭州:杭州电子科技大学,2017.
[3] 孙吉.基于PXI总线的信号调理电路设计[D].太原:中北大学,2016.
[4] 蔡菁,史博,王辰辰.信号调理器对动态测试的影响[J].计测技术,2019,39(3):83-88.
[5] 张天文,李廷军.基于MC34063负反馈支路自动增益控制电路设计[J].仪表技术与传感器,2019(7):114-116,120.
[6] 李双喜,郑凤菊,娄树勇,等.一种精密整流电路在电涡流位移传感器检测中的应用[J].山西电子技术,2018(5):39-40,88.
[7] 张琦.基于PXI总线的信号调理与采集系统的设计[D].太原:中北大学,2018.
[8] 田泽,郎静,杨杰,等.HKA2910传感器信号调理芯片设计[J].电子技术应用,2016,42(5):10-13.
作者信息:
江润东,姚金杰,王 闽,王瑞瑞
(中北大学 中北大学信息探测与处理山西省重点实验室,山西 太原030051)
相关参考
涡流式传感器能否测量大位移量(RVIT15-120i位移传感器常见故障及排障方法)
大家好,我是【广州工控传感★科技】RVIT15-120i位移传感器事业部,张工。位移传感器又称线性传感器,是属于金属感应的线性器件。传感器的作用是将各种被测物理量转化为电能。位移是与物体在运动过程中的位置运动有关的...
涡流式传感器能否测量大位移量(RVIT15-120i位移传感器常见故障及排障方法)
大家好,我是【广州工控传感★科技】RVIT15-120i位移传感器事业部,张工。位移传感器又称线性传感器,是属于金属感应的线性器件。传感器的作用是将各种被测物理量转化为电能。位移是与物体在运动过程中的位置运动有关的...
...障诊断的前提条件。由于所有振动信息的源头,均来自于传感器,因此需要了解一下有关振动传感器的类型、构造、工作原理及性能特点等方面的基本知识。 加速度与速度传感器是我们熟知的,在使用和安装上并无非常特殊之...
...障诊断的前提条件。由于所有振动信息的源头,均来自于传感器,因此需要了解一下有关振动传感器的类型、构造、工作原理及性能特点等方面的基本知识。 加速度与速度传感器是我们熟知的,在使用和安装上并无非常特殊之...
涡流传感器的位移特性电路图(电涡流传感器应用领域广泛 2022年后市场发展空间广阔)
电涡流传感器应用领域广泛市场发展空间广阔 电涡流传感器主要由探头、延伸电缆、变换器等部分组成,作为一种非接触线性化计量工具,电涡流传感器可根据反向电磁场强度来判断与被测体之间的距离。电涡流传感器是一...
涡流传感器的位移特性电路图(电涡流传感器应用领域广泛 2022年后市场发展空间广阔)
电涡流传感器应用领域广泛市场发展空间广阔 电涡流传感器主要由探头、延伸电缆、变换器等部分组成,作为一种非接触线性化计量工具,电涡流传感器可根据反向电磁场强度来判断与被测体之间的距离。电涡流传感器是一...
大家好,我是【广州工控传感★科技】MHR010位移传感器事业部,张工。位移传感器的基础知识从根本上说,MHR010位移传感器测量物体位置的变化。这可以通过多种方式完成,包括但不限于测量翘曲、应变、压力、速度、厚度、控...
大家好,我是【广州工控传感★科技】MHR010位移传感器事业部,张工。位移传感器的基础知识从根本上说,MHR010位移传感器测量物体位置的变化。这可以通过多种方式完成,包括但不限于测量翘曲、应变、压力、速度、厚度、控...
传感器是新技术革命和信息社会的重要技术基础,是当今世界极其重要的高科技,一切现代化仪器、设备几乎都离不开传感器。它是一门正在蓬勃发展的现代化传感器技术,是涉及微机械与微电子技术、计算机技术、信号处理技...
传感器是新技术革命和信息社会的重要技术基础,是当今世界极其重要的高科技,一切现代化仪器、设备几乎都离不开传感器。它是一门正在蓬勃发展的现代化传感器技术,是涉及微机械与微电子技术、计算机技术、信号处理技...