汽车gps定位能精确到多少米(5厘米精度的3D道路地图,长什么样?)
Posted
篇首语:缺乏知识就无法思考,缺乏思考也就得不到知识。本文由小常识网(cha138.com)小编为大家整理,主要介绍了汽车gps定位能精确到多少米(5厘米精度的3D道路地图,长什么样?)相关的知识,希望对你有一定的参考价值。
汽车gps定位能精确到多少米(5厘米精度的3D道路地图,长什么样?)

编译 / 朱 琳
编辑 / 张霖郁
设计 / 赵昊然
来源 / futurecar、nvidia,作者:Eric Walz
如果你能以厘米级的精度构建3D道路地图,会怎么样?这就是芯片制造商英伟达(Nvidia)公司通过其新的“NVIDIA DRIVE Map”平台所做的事情。该公司计划在美国、中国和欧洲绘制数十万英里的道路地图,以帮助自动驾驶汽车安全导航,其精确度为5厘米或以下。
英伟达首席执行官兼创始人黄仁勋(Jensen Huang)在3月22日举办的英伟达年度GTC技术大会上,宣布了新的DRIVE Map平台。
DRIVE Map是一个可扩展的多模式地图引擎,旨在加速L3甚至L4自动驾驶汽车的部署。为了达到更高的自动驾驶水平,这些车辆需要更详细的地图,以便在没有人协助的情况下安全导航。
英伟达在2021年收购了高清地图初创公司DeepMap后,加快了DRIVE Map的开发。这家初创公司的核心地图技术被纳入了DRIVE Map。英伟达的DRIVE Map结合了DeepMap勘测地图的准确性,又具有基于AI的众包地图的规模。
在被英伟达收购之前,DeepMap公司专门融合了来自数码摄像头的众包图像、从乘用车上收集的雷达和3D激光雷达数据,以创建其用于自动驾驶汽车的高分辨率地图。
打车公司Lyft也尝试使用众包数据来建立高度精确的高清地图。2020年,Lyft打车平台上的一些司机开始使用小型、低成本的仪表盘摄像头,收集十字路口、骑自行车者、步行者以及其他司机外出接送乘客时的行为录像。
自动驾驶车辆使用的高清地图包括语义细节,这些细节是数百万司机每天用来转弯导航的标准2D地图上所没有的。而高度详尽的3D地图包括车道标记、路标、人行横道、路缘石和其他基础设施的确切位置。
DeepMap公司的其他工作包括:利用从车辆上收集的众包数据保持这些地图的更新,以及保持它们随时可用。保持高清地图的实时更新和访问,对自动驾驶汽车开发者来说一直是一大挑战。

英伟达公司的DRIVE Map旨在支持世界各地的自动驾驶车辆。英伟达正在创建北美、欧洲和亚洲主要公路的高清地图。到2024年,它将为北美、欧洲和亚洲50万公里的道路提供勘测水平的地面真实地图覆盖。通过从数以百万计的乘用车上收集的数据,这些地图将不断得到更新和扩展。

三层定位:摄像头、雷达和激光雷达
多层DRIVE Map包含摄像头、雷达和激光雷达传感器的定位层,因此自动驾驶汽车的GPS可以通过这三层中的一层或多层准确知道它在地图上的位置。AI映射驱动可以独立地对地图的每一层进行定位,为L3和L4自动驾驶提供所需冗余度。
摄像头定位层由人类司机在导航时看到的相同细节组成,如车道分隔线、道路标记、道路边界、交通灯、标志和电线杆。
雷达定位层是雷达回波的聚合点云,也用于确定自动驾驶车辆的精确位置。雷达数据在低光照条件和雨雾等恶劣天气条件下特别有用,而在这些条件下,摄像头和激光雷达的表现并不理想。
在无法提供典型地图属性的郊区,使用雷达定位也很有帮助,AI能够根据雷达扫描发现的周围物体进行定位。
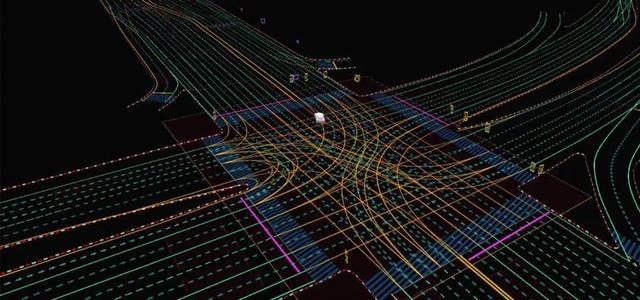
DRIVE Map使用雷达扫描生成的详细信息 ▼
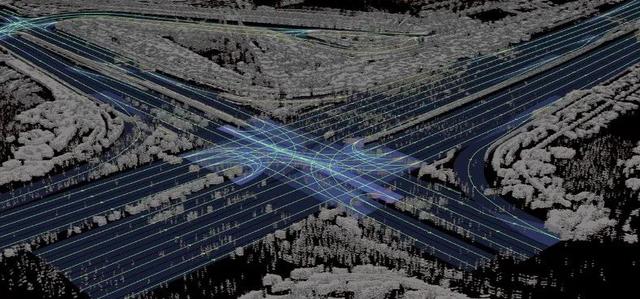
激光雷达体素层提供了最精确可靠的环境认知。据英伟达称,它以5厘米的分辨率构建了一个3D世界。该公司称,这种高水平的精确度是单靠摄像头和雷达数据无法实现的。
一旦车辆在地图上被精确定位,AI就可以利用地图中的详细语义信息,将车辆置于车道中心,并以其他道路使用者期望的方式行驶。
语义地图数据包括道路布局、转弯专用车道、人行横道和交通信号灯等特征,以及所有特征的相互连接方式。它类似于人类司机使用GPS转弯指示导航。
DRIVE Map实际上是使用两个独立的地图引擎建立的,一个是真值地图引擎,另一个是众包地图引擎。真值数据是由勘测车辆收集的,而众包地图引擎是由在地图上行驶的数以百万计乘用车所收集的数据建立的。前者实现了厘米级的精度,后者实现了地图的持续更新和扩展。
真值地图引擎是基于DeepMap的勘测地图引擎技术,该技术已在过去六年中得到开发和验证。
基于AI的众包引擎从数以百万计的汽车中收集地图更新,在车辆行驶过程中不断将新数据上传到云端。然后,这些数据在NVIDIA Omniverse中被完全保真地汇总,在数小时内为现实世界的车队提供新鲜的OTA地图更新。
DRIVE Map还提供了一个名为“DRIVE MapStream”的数据接口,允许任何符合DRIVE Map要求的乘用车利用从车辆上收集的摄像头、雷达和激光雷达数据持续更新地图。

地球级“数字孪生”
除了协助AI驱动的自动驾驶系统做出更好的驾驶决策外,DRIVE Map还帮助加速自动驾驶汽车的部署,为深度神经网络训练以及为测试和验证而生成真值训练数据。
这些工作流程以NVIDIA Omnivers为中心,加载和存储真实世界的地图数据。Omniverse维护这个地球级“数字孪生”,它将使用勘测车辆与数百万辆乘用车一起持续更新。
Omniverse利用自动化内容生成工具,将详细的地图转化为可驾驶的模拟测试环境,该环境可与NVIDIA DRIVE Sim一起使用,以改进AI驱动的自动驾驶软件。据英伟达称,道路标高、道路标记、岛屿、交通信号、标志和电线杆等特征在模拟环境中以厘米级的精度准确复制。
英伟达开发了一个强大的计算机模拟环境,为自动驾驶技术开发人员提供了一个“人工宇宙”,以训练Robotaxi和自动驾驶汽车,让它们学会如何在使用真实世界数据构建的模拟环境中行驶。
自动驾驶汽车的开发者还可以使用模拟环境来生成边缘情况的训练场景,这些场景是真实世界的数据所不能提供的,或者是使用勘测车辆难以获得的。他们也可以在现实世界部署自动驾驶汽车之前,在安全的数字孪生环境中测试软件。
数字孪生为车队运营商提供了一个完整的虚拟视图,让他们了解车辆在世界范围内的行驶位置,在需要时协助进行远程操作。
新的DRIVE Map是一个功能齐全且可扩展的平台。它使自动驾驶汽车对现实世界有了深入的了解,这可以帮助开发者提高车辆的AI驱动自动驾驶能力。
英伟达表示,DRIVE Map将提供给整个自动驾驶汽车行业。
本文由汽车商业评论原创出品
转载或内容合作请联系说明
违规转载必究
相关参考
方向盘不正做四轮定位能调好吗(准备给汽车做四轮定位前最好想清楚,当心越定越歪)
定期给汽车做保养是个好习惯,不仅能让汽车各个零件保持稳定的性能,还能让汽车的寿命变得更长。但是过度保养就不可取了,特别是有些检修项目,钱没少花,问题一样没解决,而且还有可能越修越麻烦,这也正是为什么很...
最近gps定位不准(手机为啥室内定位不准?原来是这个功能没开:涨姿势了)
...星分L1和L5,小米9都支持),冷启动需要几十秒才能定位,精确度大概10米;
徕卡120米测距仪(徕卡GPS在海上打桩船施工测量中的应用)
...船主要用于插打一般工程基础的水泥桩及钢管桩,其定位精度要求较低。而采用大型
热镀锌电焊网批发(12米的高冷镀锌焊接网一捆能有多少圈(5乘5厘米,31圈,二))
...算的话,两个头算做一圈,如果是一个头计算的话,数了多少圈就计算多少圈),一捆大约能有20米。
热镀锌电焊网批发(12米的高冷镀锌焊接网一捆能有多少圈(5乘5厘米,31圈,二))
...算的话,两个头算做一圈,如果是一个头计算的话,数了多少圈就计算多少圈),一捆大约能有20米。
汽车gps定位追踪器(无人驾驶的关键:高精度定位盒子P-Box)
图片来源:广州导远无人驾驶或者车道级导航最基础的根源是基于绝对定位的车道级定位,想象一下,高速公路上不知道自己在哪条车道上,很有可能会错过出口或走错路,当然谈不上智能驾驶了。用视觉或激光雷达的相对定位...
...消耗量的试验方法如下:1.试验规范可以按照GB/T12534-90《汽车道路试验方法通则》来实施。2.试验车辆承载量除有特殊规定外,轿车为规定载荷的一半(取整数);城市客车为总质量的65%;其他车辆为满载,乘员质量及其装载要求按...
...消耗量的试验方法如下:1.试验规范可以按照GB/T12534-90《汽车道路试验方法通则》来实施。2.试验车辆承载量除有特殊规定外,轿车为规定载荷的一半(取整数);城市客车为总质量的65%;其他车辆为满载,乘员质量及其装载要求按...
...材料质量要求及含水量要求。 将拌合好的混合料用自卸汽车运输到施工现场,同时根据运距远近,视气候条
...态、快速静态、动态测量都是需要事后进行解算才能获取厘米级的精度,而RTK是能够在野外实时得到厘米级定位精度的测量方法,它采用了载波相位动态实时差分方法,是GPS应用的重大里程碑,它的出现为工程放样、地