气动执行机构和电动执行机构(转载--常见电动执行机构知识)
Posted
篇首语:只有受过教育的人才是自由的。本文由小常识网(cha138.com)小编为大家整理,主要介绍了气动执行机构和电动执行机构(转载--常见电动执行机构知识)相关的知识,希望对你有一定的参考价值。
气动执行机构和电动执行机构(转载--常见电动执行机构知识)
来源:热控圈
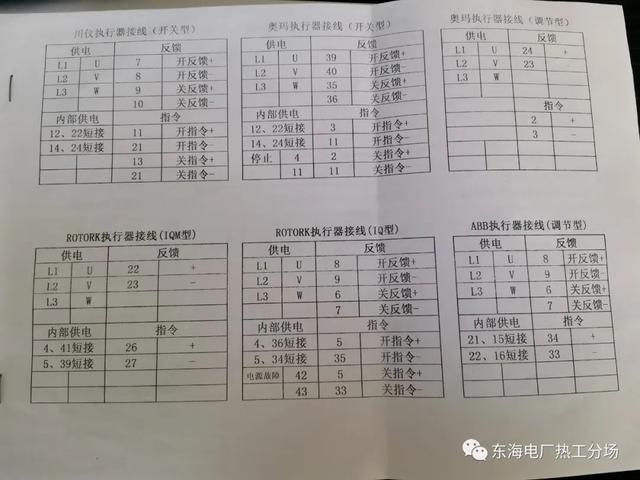
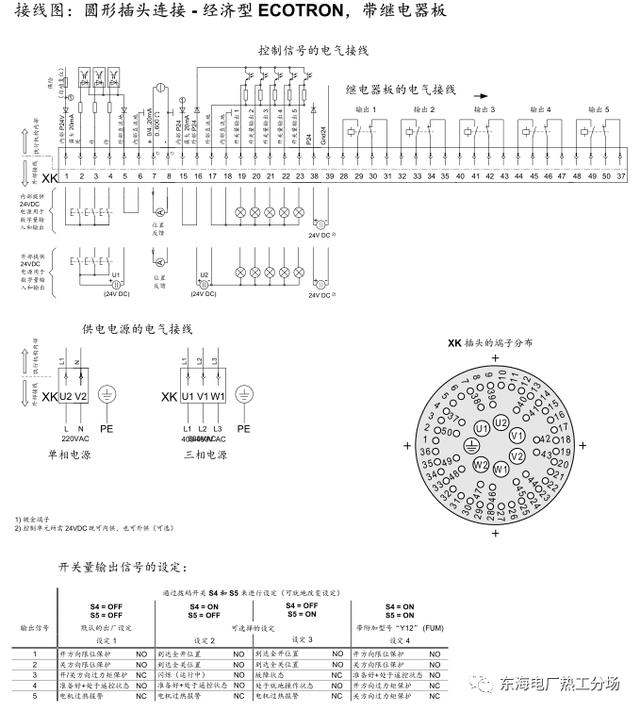
一、电动执行机构接线图

二、部分执行机构调试方法及其它知识
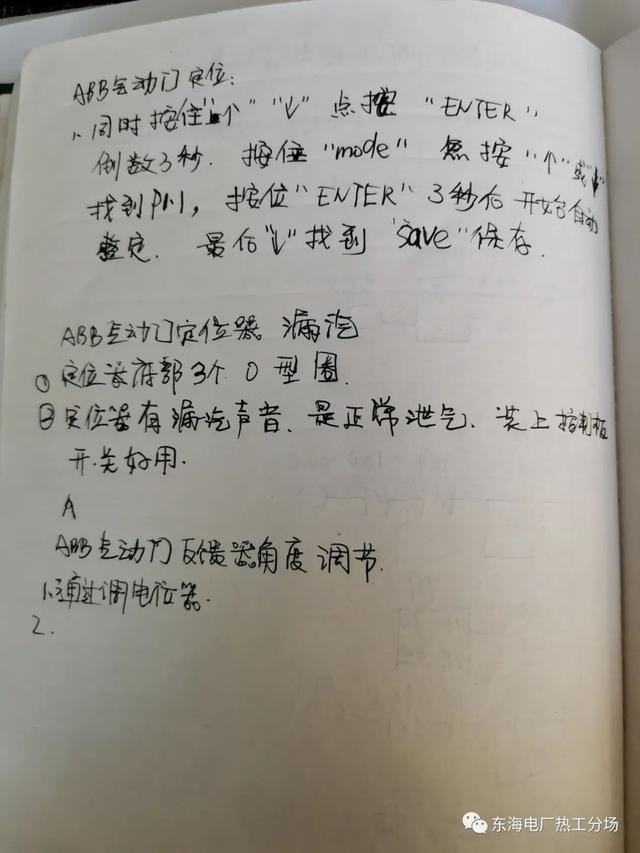
1、ABBTZID-C 智能定位器
气路连接
· 使用与定位器气源端口处标识的标准接口连接气源
· 连接定位器的输出与气动执行器的气缸
电气连接
根据下列接线端子图以及设计要求进行相应的配线(一般只需+11,-12,+31,-32)
+11 | -12 | 控制信号输入端子(DC4---20mA,负载电阻Max.410欧姆) |
+31 | -32 | 位置返馈输出端子(DC4---20Ma,DCS+24V供电) |
+41 | -42 | 全关信号输出端子(光电耦合器输出) |
+51 | -52 | 全开信号输出端子(光电耦合器输出) |
+81 | -82 | 开关信号输入端子(光电耦合器输入) |
+83 | -84 | 报警信号输出端子(光电耦合器输出) |
+41 | -42 | 低位信号输出端子(干簧管接点输出,5---11VDC, <8 mA) |
+51 | -52 | 高位信号输出端子(干簧管接点输出,5---11VDC, <8 mA) |
调试步骤
1. 接通气源,检查减压阀后压力是否符合执行器的铭牌参数要求(定位器的最大供气压力为7BAR,但实际供气压力必须参考执行器所容许的最大气源压力)。
2. 接通4---20mA输入信号。(定位器的工作电源取自输入信号,由DCS二线制供电,不能将DC24V直接加至定位器,否则有可能损坏定位器电路)。
3. 检查位置返馈杆的安装角度(如定位器与执行器整体供货,则已经由执行器供货商安装调试完毕,只需作检查确认,该步并非必须)
· 按住MODE键。
· 并同时点击⇧或⇩键,直到操作模式代码1.3显示出来。
· 松开 MODE键。
· 使用⇧或⇩键操作,使执行器分别运行到两个终端位置,记录两终端角度
· 两个角度应符合下列推荐角度范围(最小角位移20度,无需严格对称)
直行程应用范围在 -28º--- +28º 之内。
角行程应用范围在 -57º--- +57º 之内。
全行程角度应不小于25º
4. 切换至参数配置菜单
· 同时按住⇧和⇩键
· 点击ENTER键
· 等待3秒钟,计数器从3计数到0
· 松开⇧和⇩键
程序自动进入P1.0配置菜单。
5. 使用⇧和⇩键选择定位器安装形式为直行程或角行程。
角行程安装形式:定位器没有返馈杆,其返馈轴与执行器角位移输出轴同轴心
一般角位移为90º
直行程安装形式:定位器必须通过返馈杆驱动定位器的转动轴,一般定位器的 返馈杆角位移小于60º, 用于驱动直行程阀门气动执行器。
注意:进行自动调整之前,请确认实际安装形式是否与定位器菜单所选形式相符,因为自动调整过程中定位器对执行器行程终端的定义方法不同,且线性化校正数据库不同,可能导致较大的非线性误差。
6. 启动自动调整程序(执行器或阀门安装于系统后最好通过此程序重新整定):
· 按住MODE键
· 点击⇧键一次或多次,直到显示出“P1.1”
· 松开MODE键
· 按住ENTER键3秒直到计数器倒计数到0
· 松开ENTER键,自动调整程序开始运行(显示器显示正在进行的程序语句号)。
· 自动调整程序顺利结束后,显示器显示“COMPLETE”。
在自动调整过程中如果遇到故障,程序将被迫终止并显示出故障代码,根据故障代码即可检查出故障原因。也可以人为地强制中断自动调整程序。
7. 如有必要,进入“P1.2”调整控制偏差带(或称死区)。
8. 如有必要,进入“P1.3”测试设定效果。
9. 存储设定结果:
· 按住MODE键
· 点击⇧键一次或多次,直到显示出“P1.4”
· 松开MODE键
· 用⇧或⇩键选择 NV_SAVE (若选择‘CANCEL’,此前所作修改将不予存储。)
· 按住ENTER 键3秒直到计数器倒计数结束后松开
前面所进行的设定和自动调整中所测得的参数将存储在EEPROM 中,定位器转换到先前所选择的运行级操作模式。
运行级操作模式的选择
1.0模式:自适应控制模式
· 按住MODE键
· 点击⇧键一次或多次,直到显示出“1.0 CTRL_ADP”
· 松开MODE键
· 显示器显示阀位百分数如“50.0% POSITION”
1.1模式:固定控制模式
· 按住MODE键
· 点击⇧键一次或多次,直到显示出“1.1 CTRL_FIX”
· 松开MODE键
· 显示器显示阀位百分数如“50.0% POSITION”
1.2 模式:在执行器的实际全行程范围内手动控制
· 按住MODE键
· 点击⇧键一次或多次,直到显示出“1.2 MANUAL”
· 松开MODE键
· 显示器显示阀位百分数如“50.0% POSITION”
· 使用⇧或⇩键进行手动控制。
先按住⇧键,再按住⇩键(始终按住⇧键),执行器将快速开启
先按住⇩键,再按住⇧键(始终按住⇩键),执行器将快速关闭
1.3 模式:在定位器的检测范围内手动控制
· 按住MODE键
· 点击⇧键一次或多次,直到显示出“1.3 MAN_SENS”
· 松开MODE键
· 显示器显示返馈杆所处角度位置如“-15.0º SENS_POS”
· 使用⇧或⇩键进行手动控制。
先按住⇧键,再按住⇩键,执行器将快速开启
先按住⇩键,再按住⇧键,执行器将快速关闭
请参阅附后功能表总图
参数设定举例: 将阀门的正作用改为反作用
(定位器初始设定适合于正作用阀门,如实际驱动的阀门为反作用型式即阀杆上行关闭阀门,则需确认P2.3=Reverse)
一般的阀门出厂之前已经修改此参数无需用户再修改,但可以通过下述方法检查。定位器起始位置可以是运行模式中的任意方式
1. 切换至配置功能菜单
· 同时按住⇧和⇩键
· 点击ENTER键
· 等待3秒钟,计数器从3倒计数至0
· 松开⇧和⇩键
· 显示器显示“P1.0 ACTUATOR”
2. 从配置功能菜单中选择第二组参数
· 同时按住MODE和ENTER两键
· 点击⇧键
· 显示器显示“P2._ SETPOINT”
· 松开 MODE和ENTER两键
· 显示器显示“P2.0 MIN_PGE”
3. 从第二组配置参数中选择阀门作用方式P2.3
· 按住MODE键
· 点击⇧键3次
· 显示器显示“P2.3 ACTION”
· 松开MODE键
4. 更改阀门作用方式
· 点击⇧键选择“REVERSE”
5. 切换至“P2.7 EXIT” 存储并退出
· 按住MODE键
· 点击⇧键多次直至显示器显示“P2.7 EXIT”
· 松开MODE键
· 用⇧或⇩键选择 NV_SAVE
· 按住ENTER 键直到计数器倒计数结束后松开
前面所进行的设定和自动调整中所测得的参数将存储在EEPROM 中,定位器转换到先前所选择的运行模式.
TZID-C 系列智能定位器程序功能图解:
1. 功能级分类:
运行操作级: 适用于初次调试及日常维护中的检查或现场开关操作
参数配置级:适用于初次调试中的参数设置及整定
2. 运行操作菜单:
三级功能分类及显示器文字描述 | 功 能 描 述 |
1.0 CTRL_ADP | 选择自适应控制方式(远操) |
1.1 CTRL_FIX | 选择固定控制方式(远操) |
1.2 MANUL | 切换至现场按键操作(开或关) |
1.3 MAN_SENS | 用于检测位移范围是否合适 |
一般情况下选择1.0进行远方自动控制。只有在执行器实际行程非常小而执行器速度太快,控制发生振荡时选择1.1控制模式,但其控制精度较低。
操作模式中的1.2和1.3均可运用键盘开启或关闭执行器,但1.2专用于手操,而1.3专用于检测定位器返馈杆实际运行范围是否超出传感器的最大检测范围,以便校正返馈杆的连接,取得最佳的控制效果。
3. 参数配置级
参数配置共分11组,用P1._,P2._---P11._(P为PARAMETER首字母) 表示,而每一组又分若干项,如P1._ 分P1.0,P1.1,---P1.4共5项, P2._分P2.0,P2.1, ----P2.7共8项。
有些项中又可分若干分项以供选择,如P1.0中可选择LINEAR用于直行程执行器,选择ROTORY用于角行程执行器。又如P1.4 EXIT中可选择NV_SAVE(Non-Volatile save)存盘退出或CANCEL 不存盘退出。
有些项中只有数值以供调整,如分程调节中给定信号为4—12 mA ,则P2.0 中的数值应设为4 mA ,而P2.1中的数值应设为12mA. 如给定信号为4—20mA ,则P2.0 中的数值应设为4 mA ,而P2.1中的数值应设为20mA.
二级功能分组 | 三级功能分类及显示器文字描述 | 功 能 描 述 |
P1._ STANDARD | P1.0 ACTUATOR | 定义定位器安装形式 |
P1.1 AUTO_ADJ | 启动自动整定程序 | |
P1.2 TOL_BAND | 设定偏差带或死区 | |
P1.3 TEST | 试验修改结果 | |
P1.4 EXIT | 退出到运行操作级 | |
P2._ SETPOINT | P2.0 MIN_RGE | 设定给定信号的最小值(预设为4mA) |
P2.1 MAX_PRG | 设定给定信号的最大值(预设为20mA) | |
P2.2 CHARACT | 选择调节特性曲线 | |
P2.3 ACTION | 设定阀门正反作用方式 | |
P2.4 SHUT-OFF | 设定阀门开度阈值 | |
P2.5 RAMP⋀ | 降低开向速度 | |
P2.6 RAMP⋁ | 降低关向速度 | |
P2.7 EXIT | 退出到运行操作级 | |
P3._ ACTUATOR | P3.0 MIN_RGE | 调节曲线起始开度(预设为0%) |
P3.1 MAX_RGE | 调节曲线终止开度(预设为100%) | |
P3.2 ZERO_POS | 起始点方向设置(预设为全关即返馈杆逆时针方向) | |
P3.3 EXIT | 退出到运行操作级 | |
P4._ MESSAGES | P4.0 TIME _OUT | 定位超时 |
P4.1 POS_SW1 | 第一位置信号设置点 | |
P4.2 POS_SW2 | 第二位置信号设置点 | |
P4.3 SW1_ACTV | 高于或低于第一位置信号时有效 | |
P4.4 SW2_ACTV | 高于或低于第二位置信号时有效 | |
P4.5 EXIT | 退出到运行操作级 | |
P5._ ALARMS | P5.0 LEACKAGE | 启动执行器气缸泄漏报警 |
P5.1 SP_RGE | 启动给定信号超限报警 | |
P5.2 SENS_RGE | 启动零点漂移报警 | |
P5.3 CTRLER | 启动远方控制被切换报警 | |
P5.4 TIME-OUT | 启动定位超时报警 | |
P5.5 STRK_CTR | 启动调节行程超限报警 | |
P5.6 TRAVEL | 启动总行程超限报警 | |
P5.7 EXIT | 退出到运行操作级 | |
P6._ MAN_ADJ | P6.0 MIN_VR | 手动设置阀门全关位置 |
P6.1 MAX_VR | 手动设置阀门全开位置 | |
P6.2 ACTAUTOR | 选择执行器型式 | |
P6.3 SPRNG_Y2 | 设定执行器弹簧伸长时定位器返馈杆旋转方向 | |
P6.4 ADJ_MODE | 选择自动调整所需检测的项目 | |
P6.5 EXIT | 退出到运行操作级 | |
P7._ | P7.0 KP ⋀ | 开向比例系数调整 |
P7.1 KP ⋁ | 关向比例系数调整 | |
P7.2 TV ⋀ | 开向积分时间调整 | |
P7.3 TV ⋁ | 关向积分时间调整 | |
P7.11 EXIT | 退出到运行操作级 | |
P8._ | P8.0 MIN_RGE | 阀位起始点电流值(默认为4mA) |
P8.1 MAX_RGE | 100%阀位电流值(默认为20mA) | |
P8.2 ACTION | 阀位正反方向选择(默认4mA对应阀位 0%) | |
P8.3 ALARM | ||
P8.4 TEST | ||
P8.5 EXIT | 退出到运行操作级 | |
注:除P1.1, P2.3,P3.2, P8.2外,一般其它的参数无需改动。
P1.1为自动整定程序,P2.3为执行器的正反作用形式(正作用为输出口1气压增加阀杆下行)P3.2为正反调节形式(正作用为4毫安对应阀位0%),P8.2为阀位返馈正反作用形式(正作用为阀位0%输出4毫安)
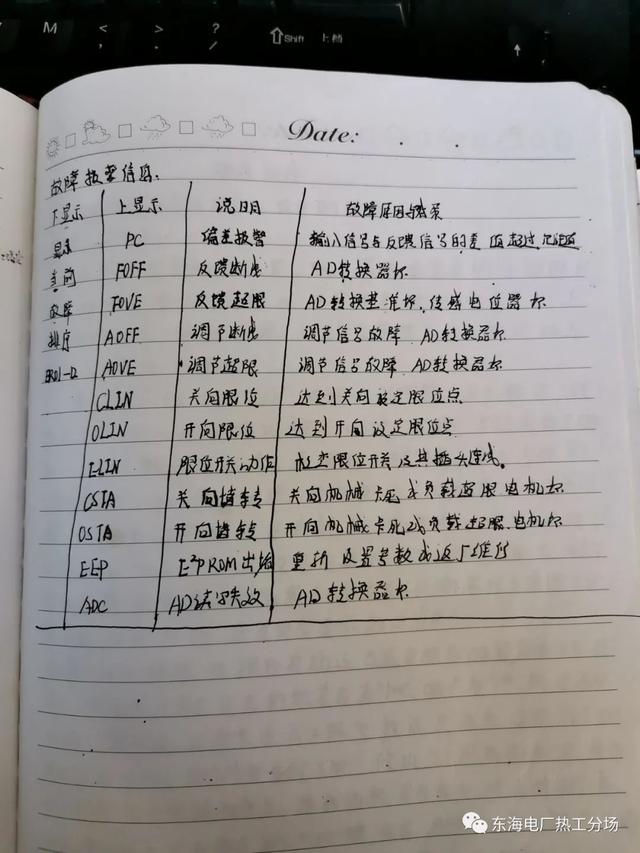
部分工作笔记图片



2、AUMA
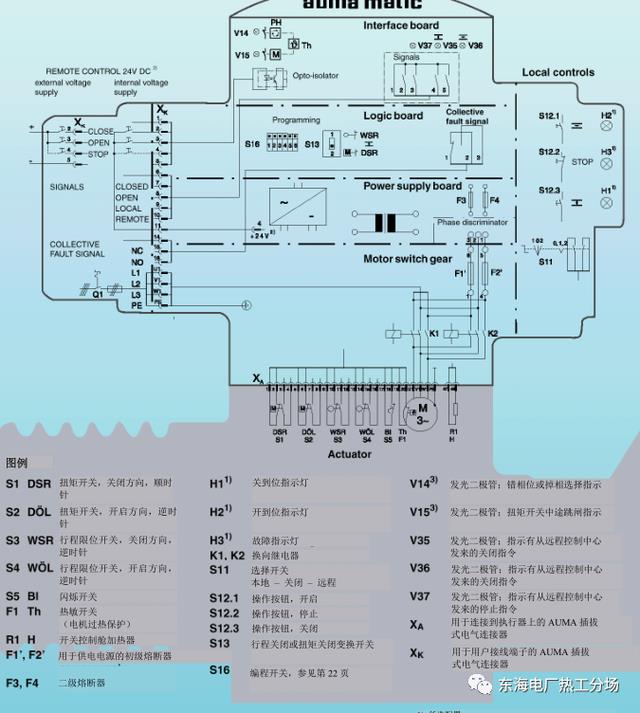
AUMA 执行机构操作说明
6、手动操作
警告:手动操作只应在电机不转动的情况下进行,否则将破坏执行器。
w 前手轻转手轮同时抬起手中间的切换杆至可以手动操作执行器。
w 释放切换杆到初始位,若切换杆不能复位,手操切换杆至初始位。
w 电机再次启动时,手动操作自动投入。
w 转动手轮至所需位置(图F)。
注:切换杆在初始状态时,只能手动操作,电机开始转动时,手动操作不起作用。
8、限位开关的设置
注:下列说明只适用于关方向为顺时针时。
按6所述切换到手动操作。
打开观察窗盖,取下开关指示器(图H),若有必要,取下指示器,可将扳手作为切换杆。
8.1 关位设置(黑色部分)
w 顺时针转动手轮,至阀门关闭。
w 用螺丝刀(5mm)按下并按箭头方向转动螺丝A(图H2),同时观察指针B,每次听到声音时,指针B已经转过了90度。
w 当指针B与标志C之间的夹角为90度时,继续缓慢旋转,到达标志C位置时,停止旋转并释放螺丝,若旋转过大,应继续旋转至再次与标志C重合。
8.2 开位设置(白色部分)
w 逆时针转动手轮,至阀门开。
w 用螺丝刀(5mm)按下并按箭头方向转动螺丝D(图H2),同时观察指针E,每次听到声音时,指针E已经转过了90度。
w 当指针E与标志F之间的夹角为90度时,继续缓慢旋转,到达标志F位置时,停止旋转并释放螺丝,若旋转过大,应继续旋转至再次与标志F重合。
9、双向限位开关设置
注:设置前开关点(中间位置)必须与电动操作的方向相同,任何操作均可通过两个中间位置开关实现。开关功能通过连接的常开或常闭点实现。
9.1 关方向设置(黑色部分)
w 用螺丝刀(5mm)按箭头方向转动设置螺丝G,同时观察指针H,每次听到声音时,指针H已经转过了90度。当指针H与标志C之间的夹角为90度时,继续缓慢旋转,到达标志C位置时,停止旋转并释放螺丝,若旋转过大,应继续旋转至再次与标志C重合。
9.2 开方向设置(白色部分)
w 用螺丝刀(5mm)按箭头方向转动设置螺丝K,同时观察指针L,每次听到声音时,指针L已经转过了90度。当指针L与标志F之间的夹角为90度时,继续缓慢旋转,到达标志F位置时,停止旋转并释放螺丝,若旋转过大,应继续旋转至再次与标志F重合。
10、力矩开关设置
注:
w 力矩的设置必须与阀门一致。
w 阀门出厂时,力矩已经设置好,不需要重新设置。
w 力矩只能由厂家设置。
11、运行调试
w 将切换开关打到就地位。
w 按6所述切换到手动操作。
w 检查开关限位的设置是否正确,手动开关阀门,观察全开或全关的位置是否正确,当方向改变时是否释放。若状态不正确,首先应设置限位开关。
w 限位开关正确设置时:
将切换开关打到就地位,按下按钮,演示运行(图K)。
图M中,为操作力矩和限位的微动开关设置了红色按钮T和P。
注:当前输入不会被关位所干扰。
12、位置指示器的机械设置
阀门从全开到全关,位置指示器盘的转角应为180度。
装置中设置一个减速齿轮。
w 转动阀门至全关。
w 转动指示器盘下部的关位指示至与观察窗上的标志重合。
w 保持指示器下部的指示位置不变,转动其上部的指示至与观察窗上的标志重合。
13、电位器设置
w 阀门在全关位置。
w 打开观察窗盖,取下指示器盘,如8所述。
w 顺时针旋转电位器R2到初始状态。
w 全关位置对应0%,全开位置对应100%。
w 注:根据位置发送器的减速齿轮的速率,全阻值范围对阀门不总是适用。因此必须提供外部调整的可能性:
w 在外设电位器上完成零点微调。
w 按下指示器盘杆,按12所述完成设置。
w 擦净密封垫表面,检查O型圈是否完好,在密封垫表面涂一层无酸性油脂。
w 装上观察窗盖。
14、位置发送器的设置
该设置是为实现远程显示或外部控制而设。
位置发送器是厂家根据信号范围状态而设置。按14.1和14.2所述完成一系列的设置。
将执行器装于阀门上,通过测量输出电流值检查设置是否正确,若有必要则重调。
表2
技术数据 | RWG 4020 | ||
接线图 | 外接2线(3线制或4线制) | 外接2线(2线制) | |
输出电流 | I | 0-20mA 4-20mA | 4-20mA |
供电电源 | U | 内部供电电压为24VDC | 14VDC+(I*RB)最大为30V |
最大输入电流 | I | 输出20mA时对应24mA | 20mA |
最大负载 | RB | 600欧 | U-14V/20mA |
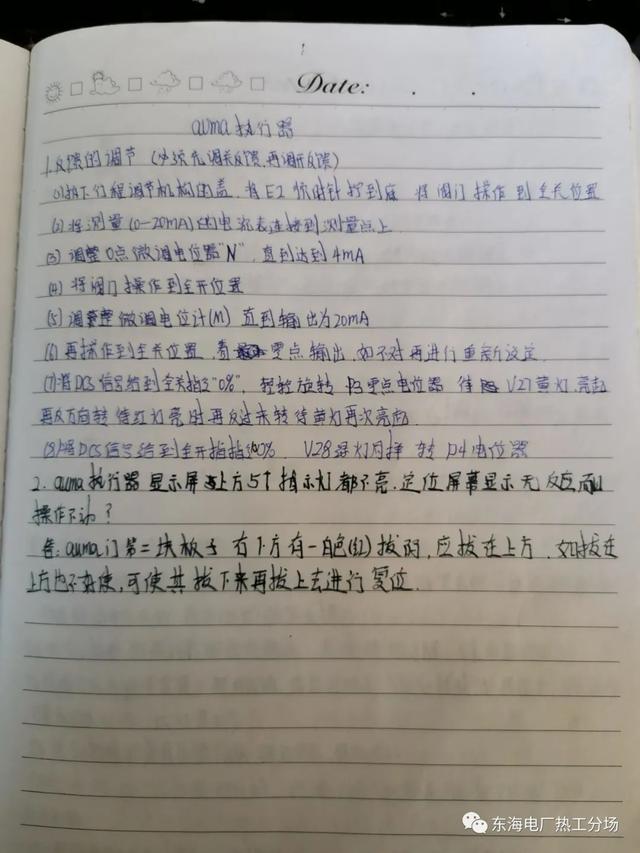
14.1 2线制4-20mA和3线制0-20mA
w 连接电源。
w 阀门全关。
w 打开观察窗的盖子,取下指示器盘如8所述。
w 取下盖板。
w 连接电流计,使0-20mA对就于测量点(图N16页或图O1)
w 对于3线制或4线制阀门的全关状态,应为0mA,对于2线制,应为4mA。
w 顺时针旋转电位器(R2)至初始状态,转动电位器并减小输出信号直至停止。
w 顺时针旋转调整电位器(N)至输出电流开始增加。
w 逆时针旋转调整电位器至电流为0、1mA或4、1mA,这样保证了信号在死区或零点之上。
w 阀门全开。
w 调节调整电位器使阀门输出为20mA。
w 关闭阀门检查电流是否为0mA或4mA,若有必要,重新调整。
w 按14页12所述完成设置。
w 擦净密封垫表面,检查O型圈是否完好,在密封垫表面涂一层无酸性油脂。
w 装上观察窗盖。
注:若不能达到最大值,检查减速齿轮的选择是否合适。
14.2 3线制、4线制的设置
w 连接电源。
w 阀门全关。
w 打开观察窗的盖子,取下指示器盘如8所述。
w 取下盖板。
w 连接电流计,使0-20mA对就于测量点(图N16页或图O2)
w 对于3线制或4线制阀门的全关状态,应为0mA,对于2线制,应为4mA。
w 顺时针旋转电位器(R2)至初始状态,转动电位器并减小输出信号直至停止。
w 顺时针旋转调整电位器(N)至输出电流开始增加。
w 逆时针旋转调整电位器(N)至电流为0、1mA或4、1mA,这样保证了信号在死区或零点之上。
w 阀门全开。
w 调节调整电位器使阀门输出为16mA(M)。
w 关闭阀门检查电流是否为0mA或4mA,若有必要,重新调整。
w 按14页12所述完成设置。
w 擦净密封垫表面,检查O型圈是否完好,在密封垫表面涂一层无酸性油脂。
w 装上观察窗盖。
注:若不能达到最大值,检查减速齿轮的选择是否合适。
15、阀门的编程
图P
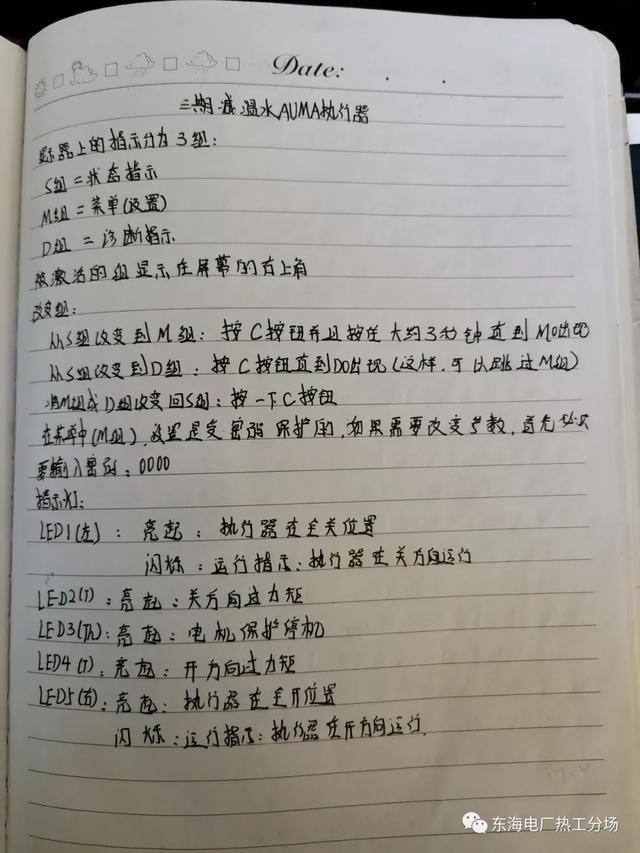
15.1 接口板的LED诊断功能
灯V14亮:缺相、电机保护动作。
灯V15亮:力矩错误:力矩开关处于中间位。
15.2 逻辑板的编程
限位的拨码开关和力矩的拨码开关的型号必须由厂家确定。
注:根据表3设置所需要的编程。
15.3 紧急-开和紧急-关信号
紧急指令发出时,由执行器操作阀门至预定的位置(三个限位开关均起作用)。
w 终点Xk1(接线图中)输入必须接一个常闭点,电压为24VDC。
w 若紧急开信号或紧急关信号不确定,断开连接点B1(开)和B2(关)。
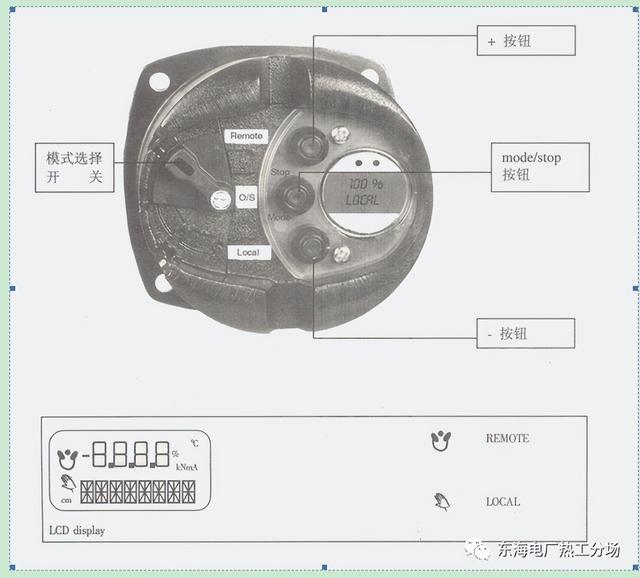
16、电动定位器
16.1 技术数据
见表
指令信号(输入信号E1) | 0/4-20mA(0-5V) |
反馈信号 | 0/4-20mA(0-5V) |
灵敏度 | 0.5%-2.5% |
微调灵敏度 | 最小0、25% |
时间延迟 | 0.5-10s |
输入阻值 | 250欧 |
操作步进模式 | |
运行时间有效至错误变化信号小于25%设定值自动减小3个系数 | 0.5-15s |
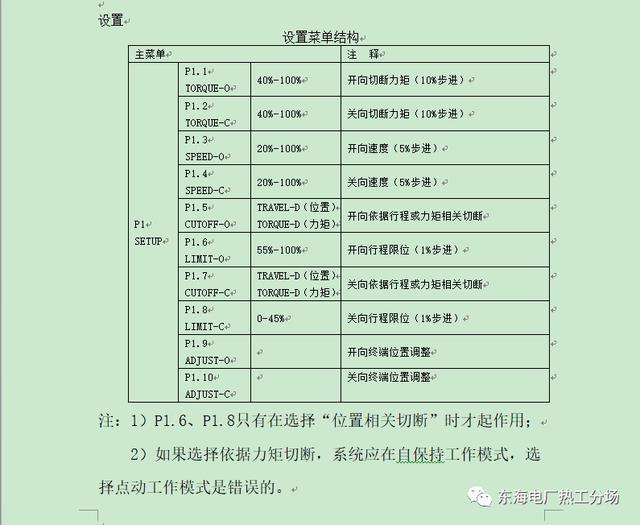
16.2 设置
AUMA定位器根据顺序编程并与执行器同时设置。
w 打开观察窗的盖子。
w 根据15.2检查逻辑板的编程。
w 注:远控自保持必须打在定位器的关位置。
w 取下盖板(图S2)根据表4定位器板上进行编程。若指令信号E1值和反馈信号E2值丢失,可从盖板上的标签上可以看到指令信号E1值和反馈信号E2值。通过定位器板上的拨码开关来设置执行器的动作值。
w 注:优先设置必须保证位置反馈为闭合回路。若信号E2值丢失,LED灯点亮,但执行器并不响应。
w 表4 拨码开关的建议设置
w 表5 可能更多设置
w 注:(1)反馈信号:从电动定位器反馈的4-20mA信号。
w (2)在E1或E2信号丢失的情况下,会产生错误信息。因为E1或E2
w 在输出信号小于4时仍具有此功能。
w (3)适用于外部信号为模拟/开关的版本:两方向上均附加有紧急操作指
令。
(4)只用于life-zero信号。
16.3 全关状态下的定位器调整
注:若执行器的力矩、限位和反馈均已设置,则可优先设置定位器。
w 将切换开关打到就地位。
w 阀门全关。
w 为执行器提供0或4mA信号。
w 逆时针旋转定位器P10至停止位。
w 注:信号丢失或极性错误时,LEDV10灯点亮。
w 连接电压测量MP3点和MP4点(图S2),以此来测量E1正常值,电压值为0-5V。
w 对于E1的正常值为0mA时,电压计指示为0V。
w 对于E1的正常值为4mA时,电压计指示为1V。
w 若电压计显示不正确,应在控制室进行校正。
w 连接电压计测量MP2点和MP1点,以此来测量E2的实际值。
w 对于E2的实际值为0mA时,电压计指示为0V。
w 对于E2的实际值为4mA时,电压计指示为1V。
w 若电压计显示不正确,按13或14调整位置反馈信号。
可能的LED指示 | 所需要的设置 |
LED灯不亮 | 顺时针旋转电位器“0”P3至黄灯亮 |
绿灯亮 | 顺时针旋转电位器P3至绿灯灭,黄灯亮 |
黄灯亮 | 逆时针旋转电位器P3至黄灯灭,然后顺时针旋转电位器至黄灯亮 |
16.4 全开位置的定位器调整
w 将切换开关打到就地位。
w 阀门全开。
w 连接电压计测量MP2点和MP1点,以此来测量E2的实际值,若位置反馈已正确设置,则电压计显示为5V,若测量值不正确,按13和14所述调整位置反馈信号,然后按16.3所述继续调整。
w 连接最大指令信号值E1=20mA。
w 连接电压计测量MP3点和MP4点,以此测量E1的正常值,E1值为20mA时,电压计显示为5V。若测量值不正确,应检查外部指令信号E1。
可能的LED指示 | 所需要的设置 |
LED灯不亮 | 逆时针旋转电位器P4至绿灯亮 |
绿灯亮 | 顺时针旋转电位器P4至绿灯灭,然后逆时针旋转电位器至绿灯亮 |
黄灯亮 | 逆时针旋转电位器P4至黄灯灭,绿灯亮 |
16.5 灵敏度设置
w 将切换开关打到程控位。
w 按盖板的标志设定指令信号值E1(△E/死区),出厂时设定的最大值为2.5%。
w 顺时针旋转电位器P9增加或减小灵敏度。为得到较精确的灵敏度,设置点应在0、1mA范围内。
w 对于n≤16min-1r执行器,顺时针旋转电位器P7得到合适的灵敏度(△E=0、25%)
w 死区的设置必须遵守下列规则:
w 若启动时数据过高,会导致阀门和执行机构不必要的磨损。因此,必须设置最大的可能死区。
w 为防止超过启动数据(指的是技术数据SAR),应通过电位器P10来设置延时0、5s或10s。
16.6 全开位置的定位器调整(反向操作)
标准版本中,最大输入信号(E1=20mA)对应于全开位置。
w 设置拨码开关S3-7到“1”,此时信号即被定义。
w 接头7和5可以互用(16页,图N)。
注:若执行器的力矩、限位和反馈均已设置,则可优先设置定位器。
w 将切换开关打到就地。
w 阀门全开。
w 为执行器提供E1值,0或4mA。
w 顺时针旋转电位器P10至停止(图S4)。
w 注:信号丢失或极性错误时,LEDV10灯点亮。
w 连接电压测量MP3点和MP4点(图S2),以此来测量E1正常值,电压值为0-5V。
w 对于E1的正常值为0mA时,电压计指示为0V。
w 对于E1的正常值为4mA时,电压计指示为1V。
w 若电压计显示不正确,应在控制室进行校正。
w 连接电压计测量MP2点和MP1点,以此来测量E2的实际值。
w 对于E2的实际值为0mA时,电压计指示为0V。
w 对于E2的实际值为4mA时,电压计指示为1V。
w 若电压计显示不正确,按13或14调整位置反馈信号。
可能的LED指示 | 所需要的设置 |
LED灯不亮 | 顺时针旋转电位器“0”P3至绿灯亮 |
绿灯亮 | 顺时针旋转电位器P3至黄灯灭,绿灯亮 |
黄灯亮 | 逆时针旋转电位器P3至绿灯灭,然后顺时针旋转电位器至绿灯亮 |
17、计时器
通过计时器板可以增大阀门全行程或中间行程的操作时间。
w 计时器安装于阀门上。
w 计时器不可与定位器连接。
17.1 LED诊断功能(计时器)。
灯V14亮:缺相 电机保护动作。
灯V15亮:力矩错 力矩开关处于中间位置。
灯V21亮:选择关方向上步进模式。
灯V22亮:选择开方向上步进模式。
17.2 计时器设置
步进模式可通过下列几步来设置:
w 双向限位开关的设置
w 外部开关的设置
w 开关时间可通过独立的电位器R10来设置,为1-30S
w 顺时针转动:时间增大
w 逆时针转动:时间减小
w R10(t-off):开方向上的关时间
w R11(t-on):开方向上的开时间
w R12(t-off):关方向上的关时间
w R13(t-on):关方向上的关时间
20、测试器
其主要用于检测故障
w 关闭电源
w 打开执行器的盖子。
w 取下接口板/计时器或定位器板。
w 将测试器接于逻辑板上(图X)。
w 通电。
部分工作笔记图片

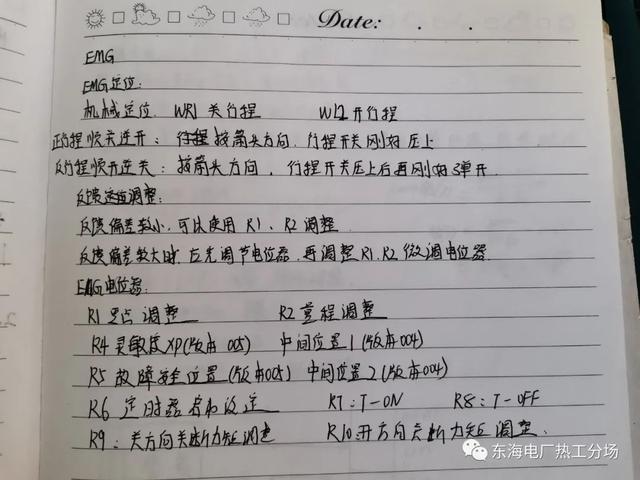
3、EMG

部分工作笔记图片

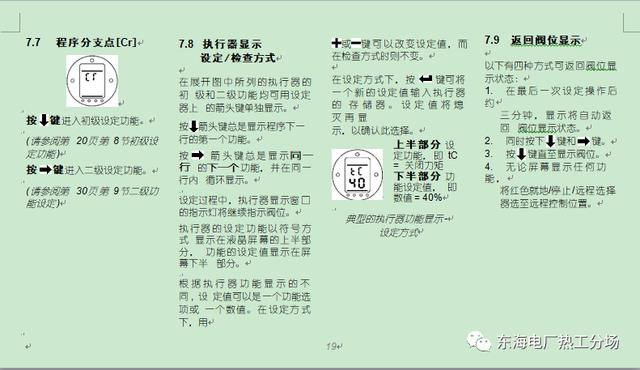
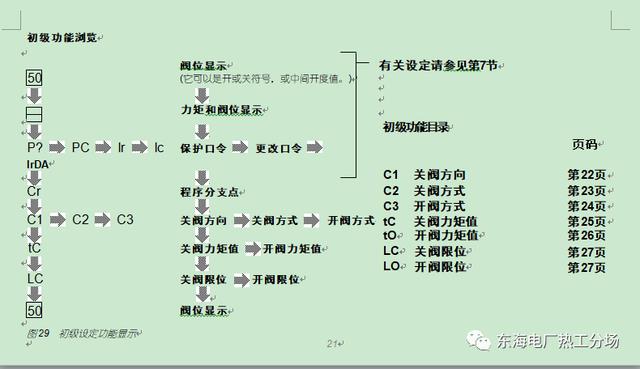
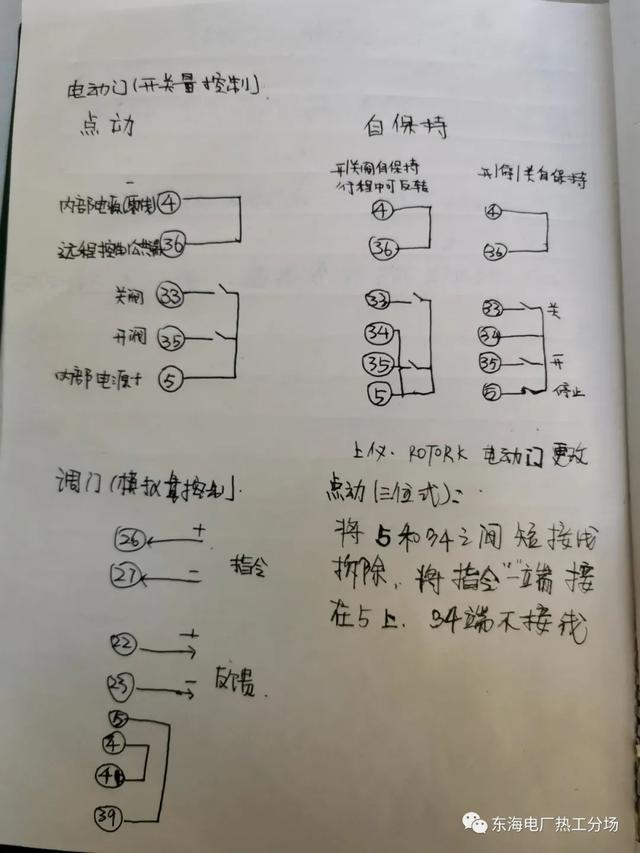
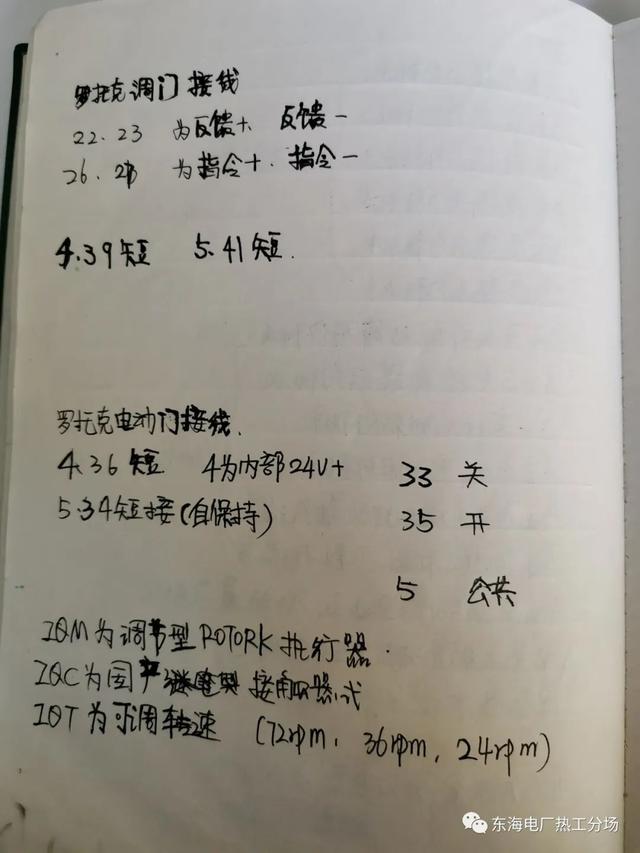
4、rotork
部分工作笔记图片


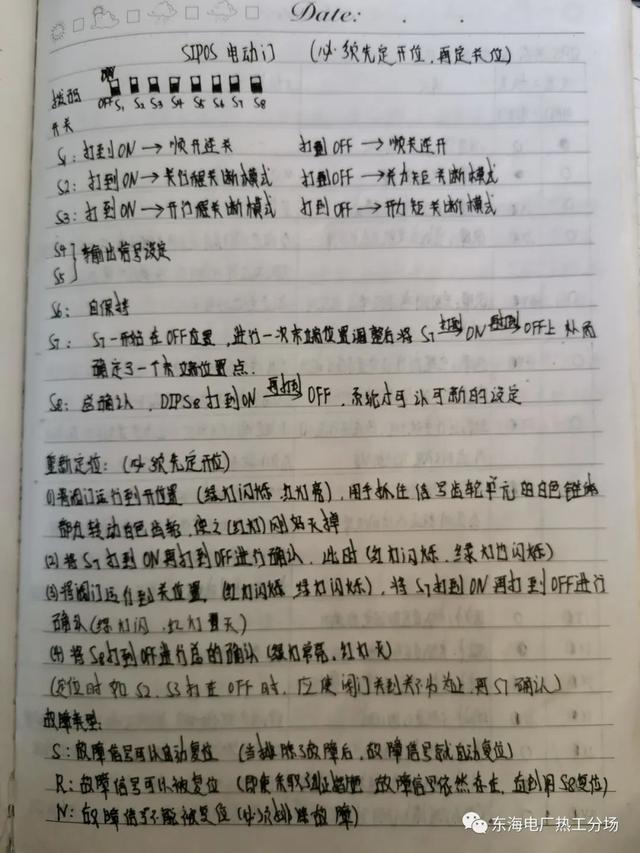
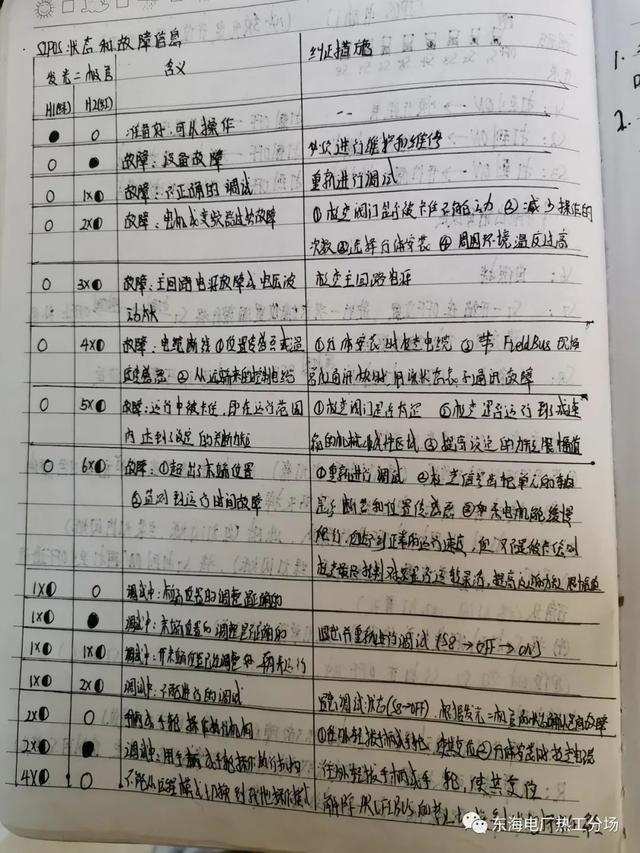
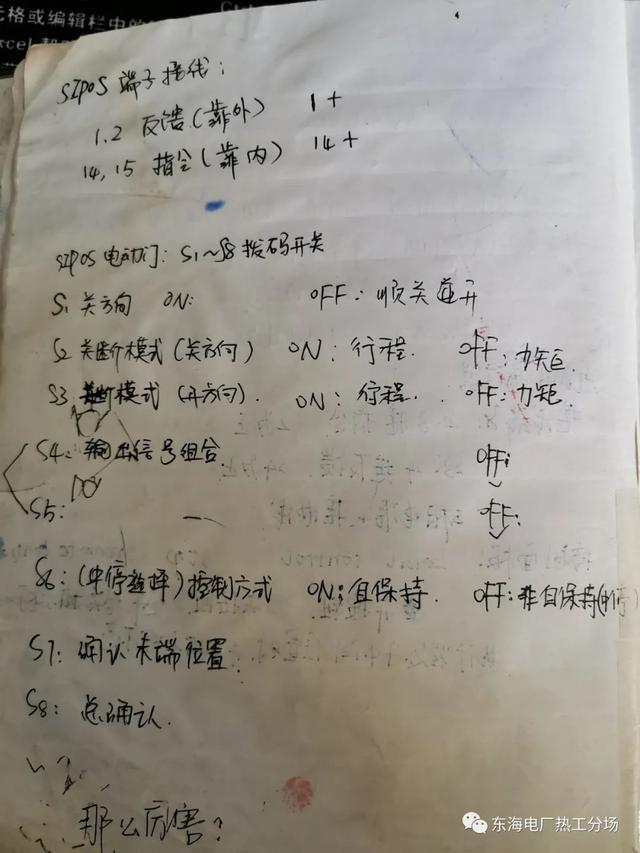
5、SIPOS

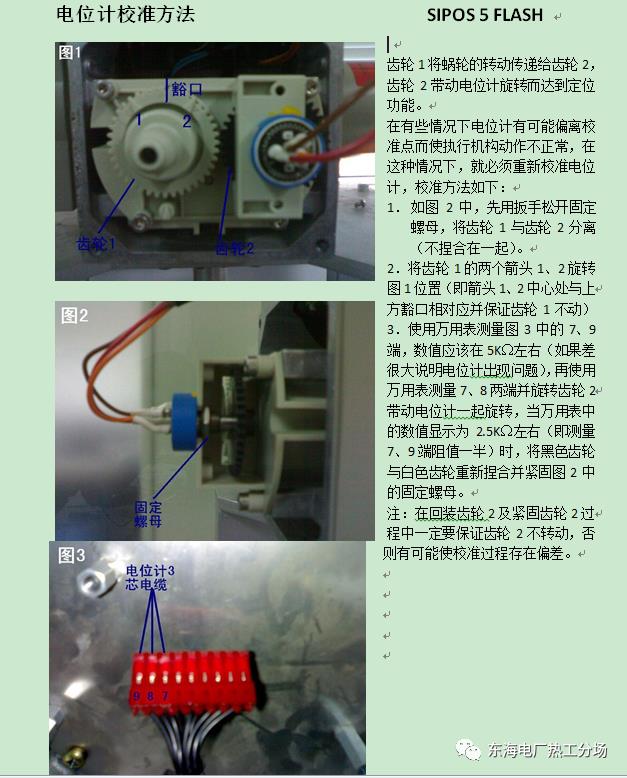
部分工作笔记图片

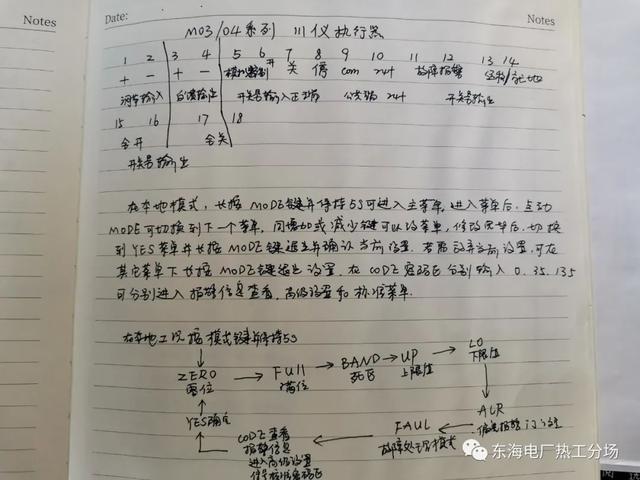
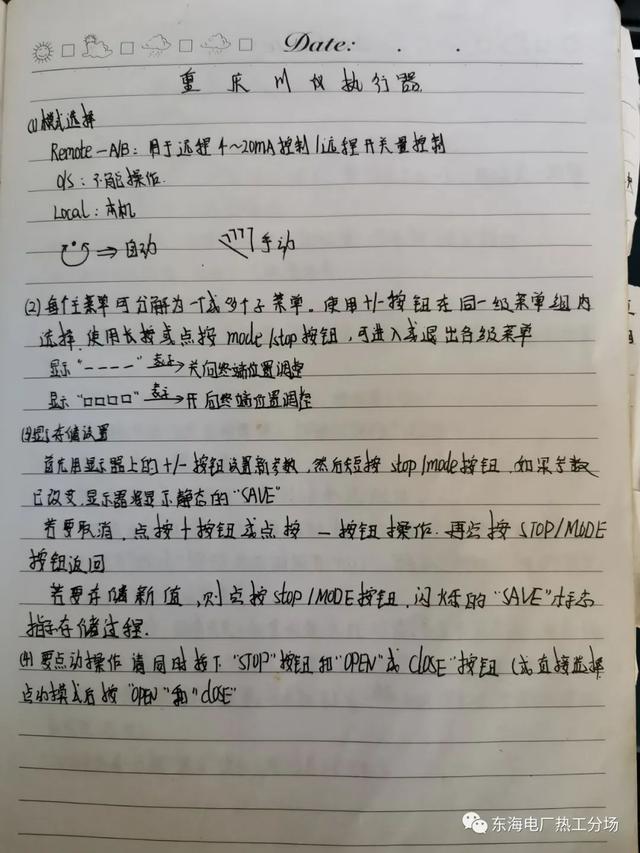
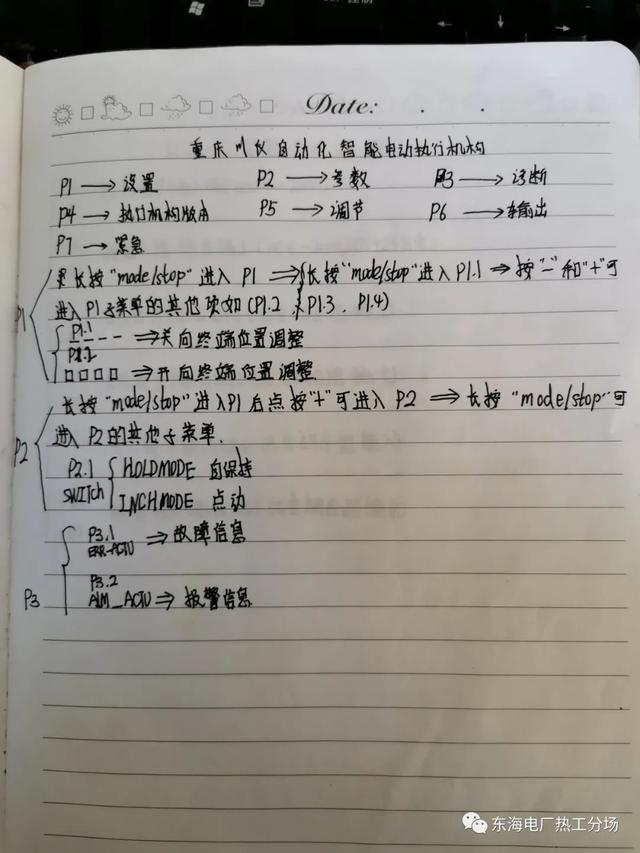
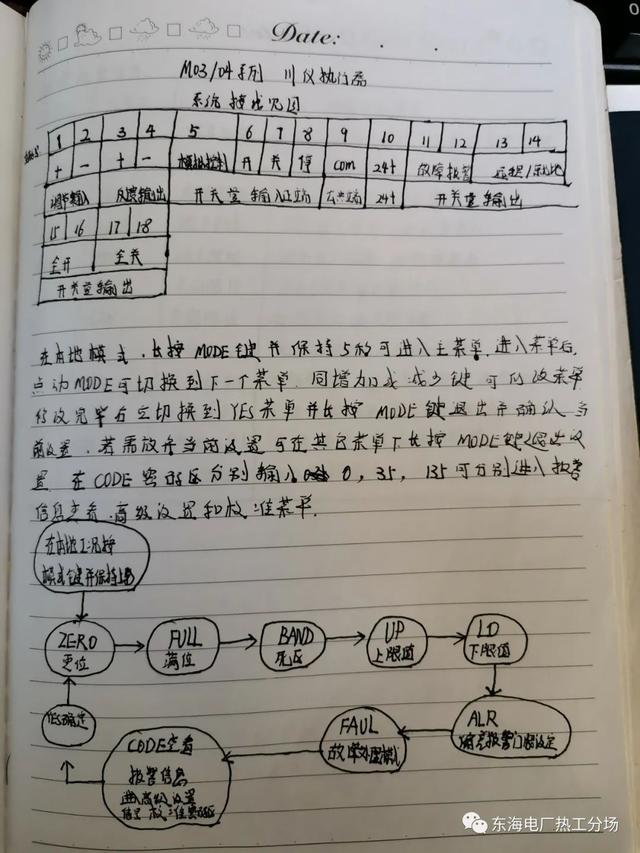
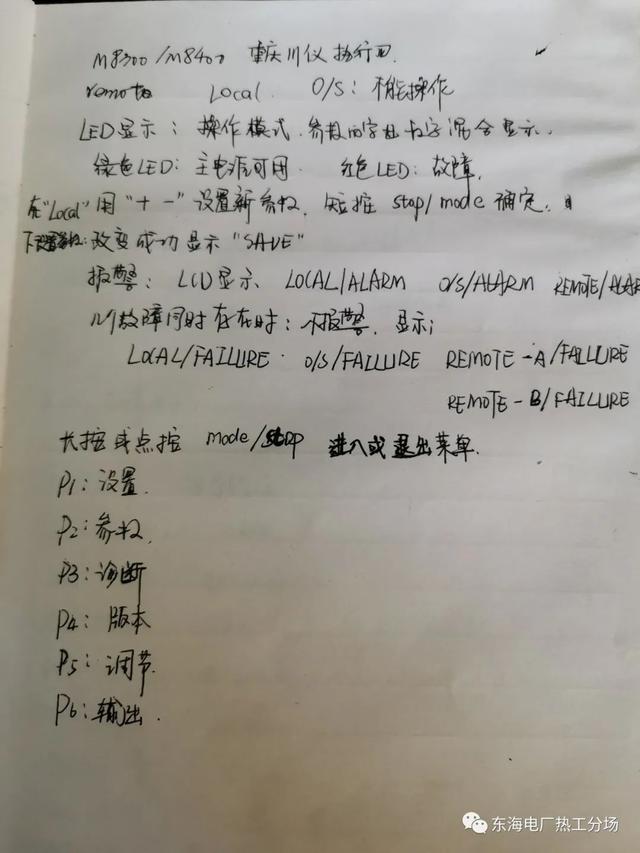
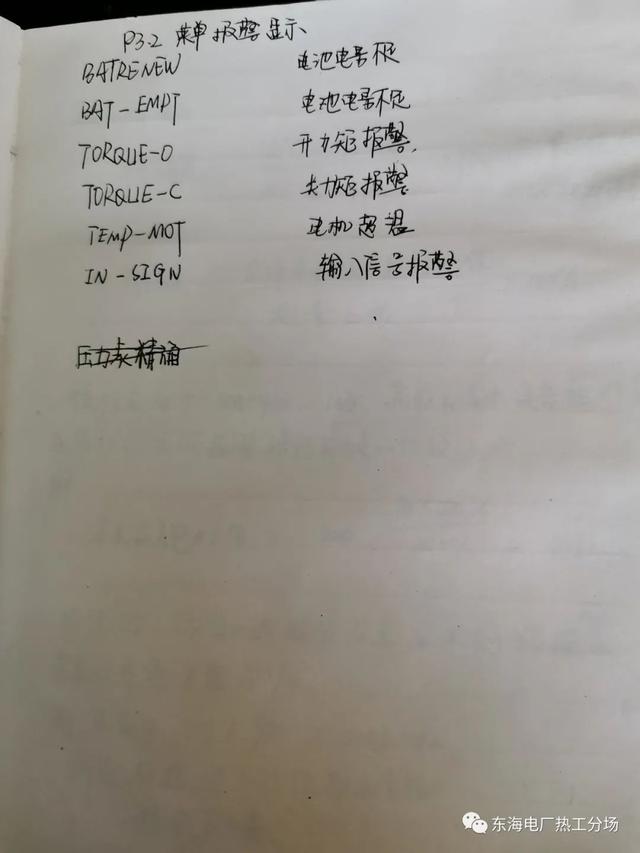
6、川仪
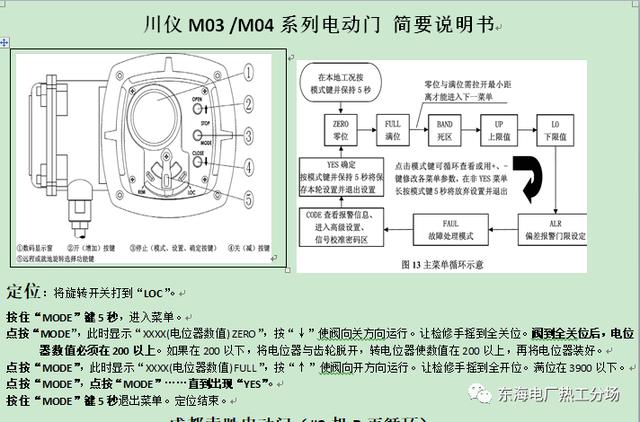

部分工作笔记图片

7、上仪



相关参考
...为动力元件,将控制器传来的信号转变为阀的开度。电动执行机构的输出方式有直行程、角行程和多转式三种类型,可和直线移动的调节阀、旋转的蝶阀、多转的感应调压器等配合工作。从控制器来的信
气动电子电磁阀控制器(电动执行器与气动执行器的区别有哪些?)
...为动力元件,将控制器传来的信号转变为阀的开度。电动执行机构的输出方式有直行程、角行程和多转式三种类型,可和直线移动的调节阀、旋转的蝶阀、多转的感应调压器等配合工作。从控制器来的信
气动、电动执行器基础知识大全!.............................................................................................................................................................................................................
气动执行器原理图动画(气动、电动执行器基础知识大全(收藏))
气动、电动执行器基础知识大全!.............................................................................................................................................................................................................
气动执行机构使活塞在气缸中移动产生推力,显然,活塞式的输出力度远大于薄膜式。因此,薄膜式适用于出力较小、精度较高的场合;活塞式适用于输出力较大的场合,如大口径、高压降控制或蝶阀的推动装置。除薄膜式和活...
一、调节阀简介调节阀通常由电动执行机构或气动执行机构与阀体两部分共同组成。直行程主要有直通单座式和直通双座式两种,后者具有流通能力大、不平衡力较小和操作稳定的特点,所以通常特别适用于大流量、高压降和泄...
气动PID调节器(采用电气比例阀代替电动阀门执行器实现饱和蒸汽变温精密控制)
...和磨损引起寿命短等问题。本文介绍了采用电气比例阀和气动减压阀组合的替代方案,其中还采用了超高精度的串级PID控制器,此串级控制法替代方案可大幅提高蒸汽温度的控制精度和速度,并延长阀门的使用寿命和可在线维护...
...造有限公司随着我国工业自动化水平的提高,调节阀作为执行机构的一种,其应用越来越广泛。调节阀的品种很多,根据用途不同可分为:1、温度控制用调节阀用于温度控制系统的阀门称为温度控制用调节阀。常用的有P型、C型...
温州气动隔膜阀膜片商(气动膜片式调节阀工作原理及常见故障处理(一))
一、调节阀简介调节阀通常由电动执行机构或气动执行机构与阀体两部分共同组成。直行程主要有直通单座式和直通双座式两种,后者具有流通能力大、不平衡力较小和操作稳定的特点,所以通常特别适用于大流量、高压降和泄...
温州气动隔膜阀膜片商(气动膜片式调节阀工作原理及常见故障处理(一))
一、调节阀简介调节阀通常由电动执行机构或气动执行机构与阀体两部分共同组成。直行程主要有直通单座式和直通双座式两种,后者具有流通能力大、不平衡力较小和操作稳定的特点,所以通常特别适用于大流量、高压降和泄...