步进电机驱动器参数设置(步进电机和它的计算选用方法)
Posted
篇首语:世上无难事,只要肯登攀本文由小常识网(cha138.com)小编为大家整理,主要介绍了步进电机驱动器参数设置(步进电机和它的计算选用方法)相关的知识,希望对你有一定的参考价值。
步进电机驱动器参数设置(步进电机和它的计算选用方法)

步进电机是一种通过步进(即以固定的角度移动)方式使轴旋转的电机。其内部构造使它无需传感器,通过简单的步数计算即可获知轴的确切角位置,这种特性使它适用于多种应用。今天,小维和大家一起来了解一下步进电机和它的计算选用方法。
步进电机工作原理
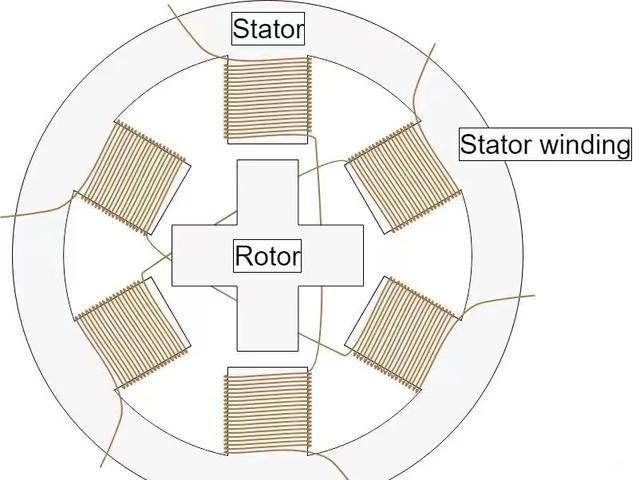
与所有电机一样,步进电机也包括固定部分(定子)和活动部分(转子)。定子上有缠绕了线圈的齿轮状突起,而转子为 永磁体或可变磁阻铁芯。稍后我们将更深入地介绍不同的转子结构。如下图显示的电机截面图,其转子为可变磁阻铁芯。
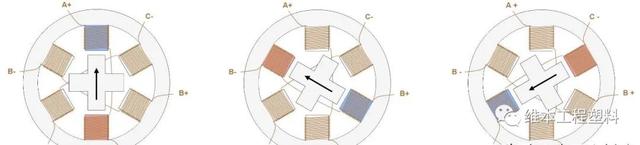
步进电机的基本工作原理为:给一个或多个定子相位通电,线圈中通过的电流会产生磁场,而转子会与该磁场对齐;依次给不同的相位施加电压,转子将旋转特定的角度并最终到达需要的位置。如下图显示了其工作原理。首先,线圈A通电并产生磁场,转子与该磁场对齐;线圈B通电后,转子顺时针旋转60°以与新的磁场对齐;线圈C通电后也会出现同样的情况。下图中定子小齿的颜色指示出定子绕组产生的磁场方向。
步进电机的类型与构造
步进电机的性能(无论是分辨率/步距、速度还是扭矩)都受构造细节的影响,同时,这些细节也可能会影响电机的控制方式。实际上,并非所有步进电机都具有相同的内部结构(或构造),因为不同电机的转子和定子配置都不同。
转子
步进电机基本上有三种类型的转子:
• 永磁转子:转子为永磁体,与定子电路产生的磁场对齐。这种转子可以保证良好的扭矩,并具有制动扭矩。这意味着,无论线圈是否通电,电机都能抵抗(即使不是很强烈)位置的变化。但与其他转子类型相比,其缺点是速度和分辨率都较低。如下图显示了永磁步进电机的截面图。

• 可变磁阻转子:转子由铁芯制成,其形状特殊,可以与磁场对齐,这种转子更容易实现高速度和高分辨率,但它产生的扭矩通常较低,并且没有制动扭矩。
• 混合式转子:这种转子具有特殊的结构,它是永磁体和可变磁阻转子的混合体。其转子上有两个轴向磁化的磁帽,并且磁帽上有交替的小齿。这种配置使电机同时具有永磁体和可变磁阻转子的优势,尤其是具有高分辨率、高速度和大扭矩。当然更高的性能要求意味着更复杂的结构和更高的成本。线圈A通电后,转子N磁帽的一个小齿与磁化为S的定子齿对齐。与此同时,由于转子的结构,转子S磁帽与磁化为N的定子齿对齐。尽管步进电机的工作原理是相同的,但实际电机的结构更复杂,齿数要比图中所示的更多。大量的齿数可以使电机获得极小的步进角度,小至0.9°。

定子
定子是电机的一部分,负责产生转子与之对齐的磁场。定子电路的主要特性与其相数、极对数以及导线配置相关。 相数是独立线圈的数量,极对数则表示每相占用的主要齿对。两相步进电机最常用,三相和五相电机则较少使用。
步进电机的控制
从上文我们知道,电机线圈需要按特定的顺序通电,以产生转子将与之对齐的磁场。可以向线圈提供必要的电压以使电机正常运行的设备有以下几种(从距离电机更近的设备开始)
晶体管桥:从物理上控制电机线圈电气连接的设备。晶体管可以看作是电控断路器,它闭合时线圈连接到电源,线圈中才有电流通过。每个电机相位都需要一个晶体管电桥。
预驱动器:控制晶体管激活的设备,它由MCU控制以提供所需的电压和电流。
MCU:通常由电机用户编程控制的微控制器单元,它为预驱动器生成特定信号以获得所需的电机行为。
下图为步进电机控制方案的简单示意图。预驱动器和晶体管电桥可以包含在单个设备中,即驱动器。

步进电机驱动器类型
市面上有各种不同的步进电机驱动器,它们针对特定应用具有不同的功能。但其最重要的特性之一与输入接口有关,最常见的几种输入接口包括:
Step/Direction (步进/方向) –在Step引脚上发送一个脉冲,驱动器即改变其输出使电机执行一次步进,转动方向则由Direction引脚上的电平来决定。
Phase/Enable(相位/使能) –对每相的定子绕组来说,Enable决定该相是否通电, Phase决定该相电流方向。
PWM – 直接控制上下管FET的栅极信号。
步进电机驱动器的另一个重要特性是,除了控制绕组两端的电压,它是否还可以控制流过绕组的电流:
拥有电压控制功能,驱动器可以调节绕组上的电压,产生的扭矩和步进速度仅取决于电机和负载特性。
电流控制驱动器更加先进,因为它们可以调节流经有源线圈的电流,更好地控制产生的扭矩,从而更好地控制整个系统的动态行为。
步进电机驱动技术
步进电机主要有四种不同的驱动技术:
波动模式:一次仅一个相位通电。为简单起见,如果电流从某相的正引线流向负引线(例如,从A +到A-),则我们称为正向流动;否则,称为负向流动。从下图左侧开始,电流仅在A相中正向流动,而用磁体代表的转子与其所产生的磁场对齐。接着,电流仅在B相中正向流动,转子顺时针旋转90°以与B相产生的磁场对齐。随后,A相再次通电,但电流负向流动 ,转子再次旋转90°。 最后,电流在B相中负向流动,而转子再次旋转90°。
全步模式:两相始终同时通电。其步骤与波动模式类似,最大的区别在于,全步模式下,由于电机中流动的电流更多,产生的磁场也更强,因此扭矩也更大。
半步模式是波动模式和全步模式的组合。这种模式可以将步距减小一倍(旋转45°,而不是90°)。其唯一的缺点是电机产生的扭矩不是恒定的,当两相都通电时扭矩较高,只有一相通电时扭矩较小。
微步模式:可以看作是半步模式的增强版,因为它可以进一步减小步距,并且具有恒定的扭矩输出。这是通过控制每相流过的电流强度来实现的。与其他方案相比,微步模式需要更复杂的电机驱动器。假设IMAX是一个相位中可以通过的最大电流,则从图中左侧开始,在第一个图中IA = IMAX,IB = 0。下一步,控制电流以达到IA = 0.92 x IMAX,IB = 0.38 x IMAX,它产生的磁场与前一个磁场相比顺时针旋转了22.5°。控制电流达到不同的电流值并重复此步骤,将磁场旋转45°、67.5°和90°。与半步模式相比,它将步距减少了一半;但还可以减少更多。使用微步模式可以达到非常高的位置分辨率,但其代价是需要更复杂的设备来控制电机,并且每次步进产生的扭矩也更小。扭矩与定子磁场和转子磁场之间的夹角正弦成正比;因此,当步距较小时,扭矩也较小。这有可能会导致丢步,也就是说,即使定子绕组中的电流发生了变化,转子的位置也可能不改变。
步进电机的优缺点
现在我们已了解了步进电机的工作原理,再总结一下各类电机的优缺点将非常有帮助。
优点:
*得益于其内部结构,步进电机不需要传感器来检测电机位置。步进电机是通过执行“步进”来运动的,因此只需简单地计算步数就可以获得给定时间的电机位置。
*此外,步进电机的控制非常简单。它也需要驱动器,但不需要复杂的计算或调整即可正常工作。与其他电机相比,其控制工作量通常很小。而且,如果采用微步模式,还可以实现高达0.007°的位置精度。
*步进电机在低速时可提供良好的扭矩,也可以很好的保持位置,而且使用寿命长。
缺点:
• 当负载扭矩过高时可能会失步。由于无法获知电机的实际位置,因此会对控制产生负面影响。采用微步模式时更易产生此问题。
• 步进电机即使在静止时也总是消耗最大电流,因此会降低效率并可能导致过热。
• 步进电机扭矩小,在高速下会产生很大的噪音。
• 步进电机具有低功率密度和低扭矩惯性比。

在传动齿轮的应用上,苏州维本工程塑料Wintone Z33耐磨静音齿轮专用料可以帮助您解决以下问题:
1.POM和PA66齿轮噪音比较大,耐磨耐疲劳性不够的问题。
2.PA12和TPEE齿轮,太软扭矩太小,耐磨性不够,在60摄氏度以上时,扭力下降比较快。
3.POM和PA66齿轮的耐腐蚀性不够,以及断齿的问题。
4.尼龙46齿轮的降噪性不够,尺寸受水份影响比较大。
Z33材料作为一款强韧耐磨型工程塑料,在齿轮应用上最显著的特点是:耐磨、静音、耐腐蚀、强韧且不受水份影响。Z33材料的典型成功应用为:微小型减速齿轮箱、电动推杆、汽车转向系统EPS齿轮、按摩器齿轮、汽油机凸轮、电助力自行车中置电机齿轮、电动剃须刀等等传动齿轮。

步进电机的选用计算方法
步进电机是一种能将数字输入脉冲转换成旋转或直线增量运动的电磁执行元件。每输入一个脉冲电机转轴步进一个步距角增量。电机总的回转角与输入脉冲数成正比例,相应的转速取决于输入脉冲频率。
步进电机是机电一体化产品中关键部件之一,通常被用作定位控制和定速控制。步进电机惯量低、定位精度高、无累积误差、控制简单等特点。广泛应用于机电一体化产品中,如:数控机床、包装机械、计算机外围设备、复印机、传真机等。
选择步进电机时,首先要保证步进电机的输出功率大于负载所需的功率。而在选用功率步进电机时,首先要计算机械系统的负载转矩,电机的矩频特性能满足机械负载并有一定的余量保证其运行可靠。在实际工作过程中,各种频率下的负载力矩必须在矩频特性曲线的范围内。一般地说最大静力矩Mjmax大的电机,负载力矩大。
选择步进电机时,应使步距角和机械系统匹配,这样可以得到机床所需的脉冲当量。在机械传动过程中为了使得有更小的脉冲当量,一是可以改变丝杆的导程,二是可以通过步进电机的细分驱动来完成。但细分只能改变其分辨率,不改变其精度。精度是由电机的固有特性所决定。
选择功率步进电机时,应当估算机械负载的负载惯量和机床要求的启动频率,使之与步进电机的惯性频率特性相匹配还有一定的余量,使之最高速连续工作频率能满足机床快速移动的需要。
选择步进电机需要进行以下计算:
(1)计算齿轮的减速比
根据所要求脉冲当量,齿轮减速比i计算如下:
公式一: i=(φ.S)/(360.Δ)
式中φ ---步进电机的步距角(o/脉冲)
S ---丝杆螺距(mm)
Δ---(mm/脉冲)
(2)计算工作台,丝杆以及齿轮折算至电机轴上的惯量Jt。
公式二:Jt=J1+(1/i2)[(J2+Js)+W/g(S/2π)2]
式中Jt ---折算至电机轴上的惯量(Kg.cm.s2)
J1、J2 ---齿轮惯量(Kg.cm.s2)
Js ----丝杆惯量(Kg.cm.s2) W---工作台重量(N)
S ---丝杆螺距(cm)
(3)计算电机输出的总力矩M
公式三:M=Ma+Mf+Mt
公式四:
Ma=(Jm+Jt).n/T×1.02×10ˉ2
式中Ma ---电机启动加速力矩(N.m)
Jm、Jt---电机自身惯量与负载惯量(Kg.cm.s2)
n---电机所需达到的转速(r/min)
T---电机升速时间(s)
公式五:Mf=(u.W.s)/(2πηi)×10ˉ2
Mf---导轨摩擦折算至电机的转矩(N.m)
u---摩擦系数
η---传递效率
公式六:Mt=(Pt.s)/(2πηi)×10ˉ2
Mt---切削力折算至电机力矩(N.m)
Pt---最大切削力(N)
(4)负载起动频率估算。数控系统控制电机的启动频率与负载转矩和惯量有很大关系,其估算公式为
公式七:
fq=fq0[(1-(Mf+Mt))/Ml÷(1+Jt/Jm)] 1/2
式中fq---带载起动频率(Hz)
fq0---空载起动频率
Ml---起动频率下由矩频特性决定的电机输出力矩(N.m)
若负载参数无法精确确定,则可按fq=1/2fq0进行估算.
(5)运行的最高频率与升速时间的计算。由于电机的输出力矩随着频率的升高而下降,因此在最高频率 时,由矩频特性的输出力矩应能驱动负载,并留有足够的余量。
(6)负载力矩和最大静力矩Mmax。负载力矩可按公式五和公式六计算,电机在最大进给速度时,由矩频特性决定的电机输出力矩要大于Mf与Mt之和,并留有余量。一般来说,Mf与Mt之和应小于(0.2 ~0.4)Mmax.

苏州维本工程塑料Wintone Z33耐磨静音齿轮专用料,作为一款强韧耐磨型工程塑料,在齿轮应用上最显著的特点是:耐磨、静音、耐腐蚀、强韧且不受水份影响。
在微小型减速齿轮箱、电动推杆、汽车转向系统EPS齿轮、按摩器齿轮、汽油机凸轮、电助力自行车中置电机齿轮等等工业齿轮的应用上,与传统的POM和PA66相比,Wintone Z33具有更好的耐磨性、静音、弹性、耐疲劳性和抗形变能力,Z33在保持了良好刚性的同时,进一步提升了弹性和韧性(这种优异的机械性能在摄氏-40度、0度和80度都有保持和体现),可以帮助解决齿轮断齿问题,同时大幅度降低摩擦噪音,经应用后比较,Wintone Z33也优于不少耐磨改性规格的POM和PA66(如聚四氟乙烯,硅酮类或二硫化钼改性)。
在微小型减速齿轮箱耐磨静音齿轮的应用上,Z33在耐磨耐疲劳性优于传统的PA12和TPEE(海翠料)的同时,还能帮助解决PA12和TPEE有时候扭力不够的问题,而且Z33具有更好的成本优势。
另外,Z33具有很好的耐腐蚀性,可以用于很多场景下接触各类化学物质的严苛环境,比如PCB设备齿轮、印染纺织机械上的齿轮,液压系统的挡圈和密封圈,等等,成功替代价格昂贵的PEEK,PA12,PVDF,PTFE,PA46,TPEE的部分应用领域。另外Z33的吸湿很少,综合性能受水份的影响很小,整包装Wintone Z33注塑前不需要提前烘料,可以直接注塑,注塑完无需水处理。


苏州维本工程塑料有限公司——您身边的工程塑料创新应用开发伙伴。
相关参考