正运动示教器用法(FANUC 机器人-示教器)
Posted
篇首语:大多数人想要改造这个世界,但却罕有人想改造自己。本文由小常识网(cha138.com)小编为大家整理,主要介绍了正运动示教器用法(FANUC 机器人-示教器)相关的知识,希望对你有一定的参考价值。
正运动示教器用法(FANUC 机器人-示教器)
一、认识示教器TP(Teach Pendant)
1、TP 的作用
(1)点动机器人
(2)编写机器人程序
(3)试运行程序
(4)生产运行
(5)查阅机器人的状态(I/O 设置,位置,焊接电流)
2、认识TP 上的键(如下图)
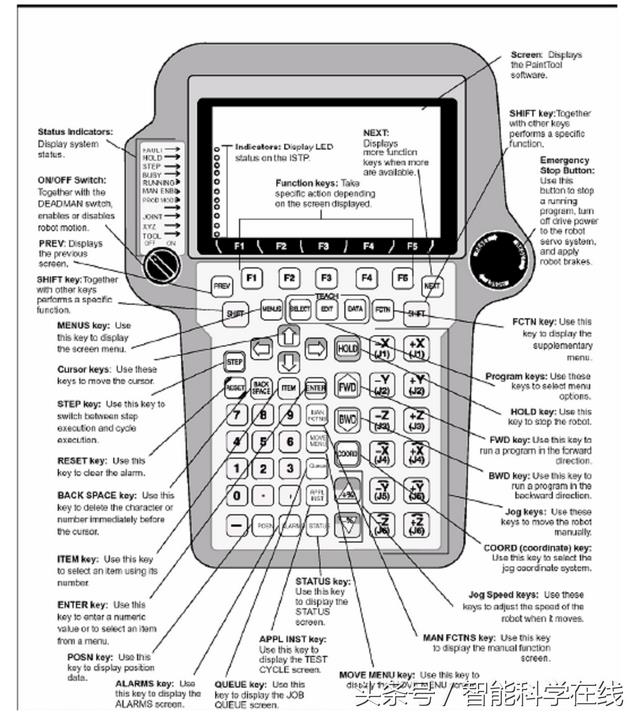
(1)Status Inicators(状态指示灯):指示系统状态。
(2)ON/OFF Switch(开关):与DEADMAN 开关一起启动或禁止机器人运动。
(3)PREV:显示上一屏幕。
(4)SHIFT key(键):与其它键一起执行特定功能。
(5)MENUS key(键):使用该键显示屏幕菜单。
(6)Cursor keys(光标键):使用这些键移动光标。
(7)STEP key(键):使用这个键在单步执行和循环执行之间切换。
(8)RESET key(键):使用这个键清除告警。
(9)BACK SPACE key(键)::使用这个键清楚光标之前的字符或者数字。
(10)ITEM key(键):使用这个键选择它所代表的项。
(11)ENTER key(键):使用该键输入数值或从菜单选择某个项。
(12)POSN key(键):使用该键显示位置数据。
(13)ALARMS key(键):使用该键显示告警屏幕。
(14)QUEUE key(键):使用该键显示任务队列屏幕。
(15)APPL INST key(键):使用该键显示测试循环屏幕。
(16)SATUS key(键):使用该键显示状态屏幕。
(17)MOVE MENU key(键):使用该键来显示运动菜单屏幕。
(18)MAN FCTNS key(键):使用该键来显示手动功能屏幕。
(19)Jog Speed keys(键):使用这些键来调节机器人的手动操作速度。
(20)COORD key(坐标系键):使用该键来选择手动操作坐标系。
(21)Jog keys(键):使用这些键来手动手动操作机器人。
(22)BWD key(键):使用该键从后向前地运行程序。
(23)FWD key(键):使用该键从前至后地运行程序。
(24)HOLD key(键):使用该键停止机器人。
(25)Program keys(程序键):使用这些键选择菜单项。
(26)SHANGHAI-FANUC
(27)FCTN key(键):使用该键显示附加菜单。
(28)Emergency Stop Button(紧急停止按钮):使用该键停止正在运行的程序,关闭机器人伺服系统的驱动电源,并对机器人实施制动。
3、TP 上的开关(如下图)

4、TP 上的指示灯

5、TP 的显示屏(如下图)
(1)液晶屏(16*40 行)
(2)显示各种TOOL 的菜单(有所不同)
(3)Quick/Full 菜单(通过FCTN 键选择)

6、屏幕菜单和功能菜单
(1)屏蔽幕菜单


(2)功能表菜单


(3)快速菜单

相关参考
...器切换运行模式。3紧急停止键。用于在危险情况下关停机器人。紧急停止键在被按下时将自行闭锁。43D鼠标。用于手动移动机器人。5移动键。用于手动移动机器人。6用于设定程序倍率的按键7用于设定手动倍率的按键8主菜单按...
库卡示教器维修(库卡机器人如何更换及设定KVGA显卡?这些步骤请收下)
在库卡机器人维修当中,经常会遇到KVGA显卡损坏需要更换及设定的问题,今天驼驮小编就来教大家KVGA显卡的更换方法及设定方法,具体请看下文。一、在更换KVGA之前,得先做好以下准备工作:1.机器人控制系统必须保持关断状...
机器人示教器维修(ABB机器人维修常见的故障问题及解决方法是什么?)
ABB机器人维修常见的故障问题及解决方法是什么? 文章来源:http://www.xmzgkwx.com/ ABB机器人维修中常见的故障问题也有很多,那今天小编就为大家简单的介绍下这些故障问题,及解决的方法,希望能帮助到大家。 鉴于...
机器人控制系统的构成和原理(弧焊机器人的系统组成和特点详解)
弧焊机器人是指用于进行自动弧焊的工业机器人。弧焊机器人的组成和原理与点焊机器人基本相同。弧焊机器人主要应用于各类汽车零部件的焊接生产。弧焊机器人系统组成一般的弧焊机器人是由示教盒、控制盘、机器人本体及...
焊接机器人操作规程1、旋开气体阀门;新瓶要放半分钟,防止有存水。2、进入机器人系统操作界面后,打开焊机电源;3、将控制柜上主开关旋至"ON"位置,控制器开启。4、对夹具的气路进行检查是否存在漏气等现象。5、...
3月28日,配天机器人在深圳SIMM展上举办了“性能·该更出色”弧焊机器人和协作机器人新品发布会。大族激光科技股份有限公司销售总监陈玉福、中山牛耳智能科技有公司总经理黄业富等合作伙伴,配天机器人总经理徐志根、副...
搬运机械手臂(ABB工业机器人IRB 1410科研版紧凑柜 6六轴焊接搬运码垛 机械手臂)
坚固--及时应用该机器人工作范围大、到达距离长(最长1.44m)。承重能力为5kg,上臂可承受18kg的附加载荷。这在同类机器人中绝无仅有。高速--较短的工作周期机器人本体坚固,配备快速精确的IRC5控制器,可有效缩短工作周期,...
机器人保养(艾利特机器人如何进行维护保养?与传统工业机器人有什么不同?)
1、艾利特机器人作为轻型协作型机器人,维护保养工作比较简单,主要内容包括:安全功能检查:周期6个月一次,测试急停按钮、自由拖拽模式和安全IO的功能(若设置)以及碰撞检测;2、目视检查,关节是否存在被污染和腐蚀、...
机器人的领域有哪些(工业机器人都应用在哪些领域?带你参观机器人生产线)
埃斯顿机器人,工业机器人在使用前需要进行调试,调试的方式是通过示教器进行点选编程。埃斯顿打磨应用工业机器人,应用于手机外壳打磨。工业机器人配上机器人视觉,可以识别物体,进行分选码垛,搬运。智能化的机...
数控车床超程报警怎么解决(当遇到FANUC机器人超程错误,该如何恢复?)
当一个或多个机器人轴的移动超出软件运动限制时,发生超程错误。发生超程错误时,其中一个超程限位开关启动,系统做出如下动作:1.关闭伺服系统驱动电源,实施机器人制动2.显示超程报警错误消息3.点亮操作面板FAULT(故...