棒材超声波探伤(分享:机器人辅助超声曲面检测的探头自主对正技术)
Posted
篇首语:内心简单,知足常乐,便是余生最美好的养生。本文由小常识网(cha138.com)小编为大家整理,主要介绍了棒材超声波探伤(分享:机器人辅助超声曲面检测的探头自主对正技术)相关的知识,希望对你有一定的参考价值。
棒材超声波探伤(分享:机器人辅助超声曲面检测的探头自主对正技术)
摘 要:对曲面工件进行超声检测时,为了获得较好的回波信号,要求声束入射方向与曲面工 件外表面法线方向一致。现有的方法通常是预先知道曲面的 CAD 模型,再对轮廓已知的曲面进 行检测,这使得系统的灵活性和适用性变差。针对上述问题,提出了一种基于激光检测的探头对正 算法,原理为:激光检测系统对待测曲面工件上检测点的位置和姿态信息进行识别,后将所获取到 的检测点信息数据发送给机械手的控制系统,机器手控制系统在获取检测点信息后,根据对正控制 策略将探头位姿调整信息发送给相应的机械臂控制器,实现对检测点的探头对正。通过探究不同 入射角度与回波信号时域特征值间关系,反求出实际的对正角度偏差,验证了该方法的有效性。
关键词:机器人辅助;曲面工件;超声检测;激光检测;探头对正
中图分类号:TG115.28 文献标志码:A 文章编号:1000-6656(2022)07-0046-04
随着现代化工业技术的高速发展,采用自动化 设备取代人工方式对工件进行探伤成为了当前较为 先进的检测手段[1]。机械手可以根据内部程序自动 完成特定操作,因而可以替代人工完成一些繁重、复 杂、危险的检测作业,并具有运动精度高、工作效率 高、运行成本低等优点[2-3]。超声无损检测技术作为 工业领域应用非常广泛的检测技术,是保证工件加 工质量以及在役工件可靠性的重要手段。将机械手 与超声无损检测技术相结合的自动化检测是无损检 测技术未来的重要发展方向[4]。
徐春广等[5]采用机械手夹持叶片,超声换能器 固定的方式,实现了对叶片叶身、进排气边等部位的无损检测,同时实现了叶片厚度的精确检测。吴思 源等[6]提出了一种复杂型面工件超声自动检测的匹 配定位方法,利用少量超声检测点数据实现被测工 件与 CAD模型的匹配定位,以提高复杂型面工件 超声自动检测的效率和精度,同时提高超声自动检 测系统的通用性。然而,在使用超声对曲面工件进 行无损检测时,要求超声换能器的声轴线方向与被 检工件靠近探头的表面法线方向重合,以保证超声 波以对检测最有利的角度入射工件[7-8]。为了实现 对复杂曲面形状工件的自动化检测,需要对超声换 能器的位置和姿态进行准确定位[9]。
现有的方法是预先知道曲面的 CAD 模型,根 据模型采用专用软件对检测路径进行规划,自动生 成检测轨迹,超声探头按照事先规划好的轨迹对工 件进行跟踪检测[10-11]。这种检测方法只能对轮廓 已知的曲面进行检测,降低了系统的灵活性和适用 性,不能满足特殊要求。对于形状未知的工件,应在 超声检测前根据曲面工件的 CAD 模型对工件进行 检测,计算出探头在各检测点的位置和姿态,保证获 取准确的发射(或接收)信号。针对机器人自动化超 声检测过程中探头的对正问题,提出了一种基于激 光测距的探头自动对正算法,并对算法的有效性进 行了验证。
1 超声波垂直入射曲面工件界面的传播特性
当超声波从一种介质传播到另一种介质时,会 在两种介质的界面上发生反射与透射现象。超声波 声束垂直入射曲面构件界面时,将产生一个与入射 方向相反的反射波和一个与入射方向一致的透射 波。为了避免检测曲面构件时声波发生聚焦或发散 现象进而影响超声回波信号的强弱,要求声束垂直 入射工件表面。
2 试验系统及原理
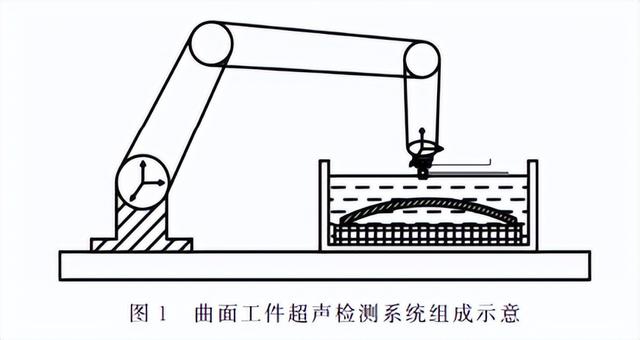
曲面工件超声检测系统(见图1)主要由六自由 度机械手、超声收发系统以及激光检测系统组成。 该系统通过机械手夹持超声探头进行扫查运动,激 光检测系统则对待测曲面工件上检测点的位置和姿 态信息进行识别,然后将获取到的检测点信息数据 发送给机械手的控制系统,机器手控制系统在获取 检测点信息后,根据对正控制策略将探头位姿调整 信息发送给相应的机械臂控制器,实现对一个检测 点的探头对正。
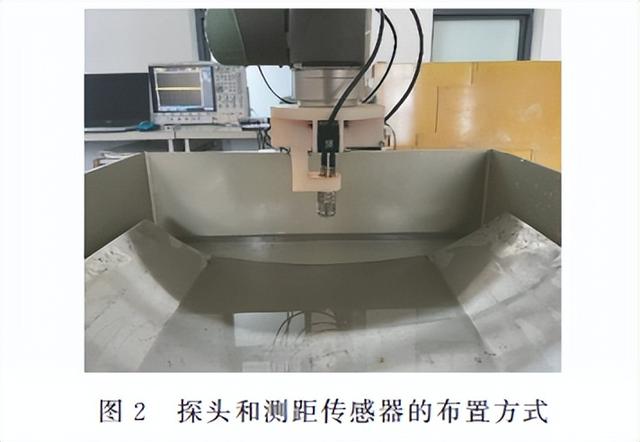
在试验开始前,需要在曲面工件上方设置若干检测点,当机械手到达检测点后,按照上述方法依次完 成检测点的探头对正,直至完成对整个工件曲面的检 测。探头和测距传感器的布置方式如图2所示。
超声信号收发系统包括超声纵波探头、信号发生 仪和数字示波器以及配套测试程序(见图3)。试验 采用反射式检测方法,即超声信号的发射和接收都由 同一个探头完成。激光检测系统主要包括测距传感 器、数据采集卡以及配套程序。3个激光测距传感器 型号为 HG-C1050,检测范围为65~135mm,检测精 度为30μm,3个传感器通过信号采集卡接收数据,并 将数据传输到计算机Labview程序中。

3 基于激光测距的探头对正算法
为了描述机械手系统本身各个连杆之间、机械 手和检测工件、检测工件与超声波探头之间的运动 关系,通常将其假设为刚体,再研究各个刚体之间的 运动关系。
一般通过世界坐标系来描述刚体的位置。一旦建立了世界坐标系,就可以通过一个3×1的位置矢 量对任意一点的位置进行描述。在坐标系A中, 三维空间中任意一点 P 的位置可以用位置矢量AP 表示
式中:Px,Py,Pz分别为P 点在世界坐标系中的位 置坐标。
刚体的姿态可由固定在刚体上的坐标系B来 描述,记坐标系B主轴方向的3个单位矢量分别 为XB,YB,ZB,将这3个单位矢量按顺序排列即可 得到工具坐标系相对于世界坐标系的表示A BR 为

通过前面的位置描述和姿态描述,可得到刚体 B的位姿描述为

通常情况下,为了便于运算,在机械手运动学 中,采用齐次矩阵来对机械手的位姿进行描述。即 将原来的旋转变换矩阵增加1行,原来的平移变换 矩阵增加1列,从而构成一个4×4的矩阵A BT,即
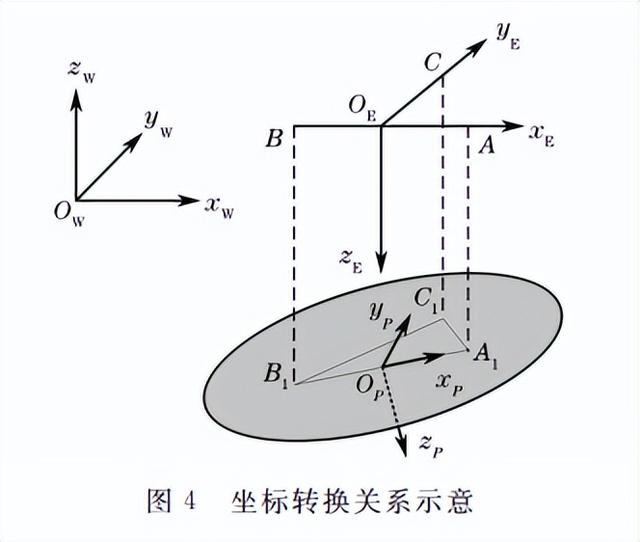
坐标转换关系如图4所示,其中 OW-xWyWzW 为 世 界 坐 标 系;OE-xEyEzE 为 探 头 坐 标 系;Opxpypzp 为被测零件曲面上任一被测点P 的坐标。
激光传感器分别布置在探头坐标系的坐标轴 上,且其到探头坐标系原点的距离都为d,3个激光 传感器在探头坐标系中的位置为(A,B,C 分别表示 3个探头的坐标)
安装激 光 传 感 器 时,检 测 光 线 的 方 向 与 探 头坐标系的zE 轴平行,检测到的距离分别用d1,d2, d3 表示,则待测面上3个激光点在探头坐标系中 的位置为
此时在待测面上,构建两个向量 B1A1,B1C1, 并求出待测平面的法向量
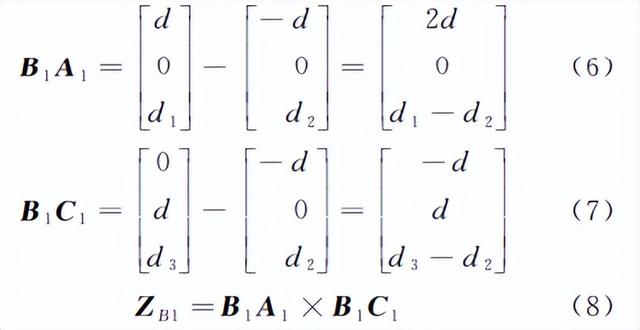
为了和探头坐标系保持一致,求得的法向量应 垂直 待 测 面 向 下。运 用 施 密 特 正 交 化 将 B1A1, B1C1,ZB13个向量正交化,再标准化得到被测点在 探头坐标系中的姿态。
通对机械手进行运动学分析,采用 D-H 参数 法建立运动学模型,得到探头坐标系相对于世界坐 标系的旋转关系和平移关系,结合被测点处的坐标 系相对于探头坐标系的旋转关系和平移关系,可以 得到被测点处坐标系相对于世界坐标系的旋转关系 和平移关系。进一步地,为了实现探头对待测点的 准确检测,只需要将机械手末端探头姿态调整为与 被测点一致的姿态,机械手位置调整到待测点上方, 声耦合特性最好的水声距处即可。
4 入射角和回波信号的关系
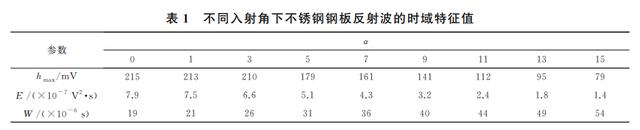
为验证上述方法的有效性,需要验证调整后机 械臂声束的实际入射角度是否符合检测要求。声束 倾斜入射时,探头接收回波信号的有效面积减少,反 射率降低导致回波信号时域特征值发生变化,可以 通过分析回波信号的时域特征值反求出当前声束的 入射角。构件的信号时域特征值为峰值hmax、能量 E、回波脉冲宽度W 。
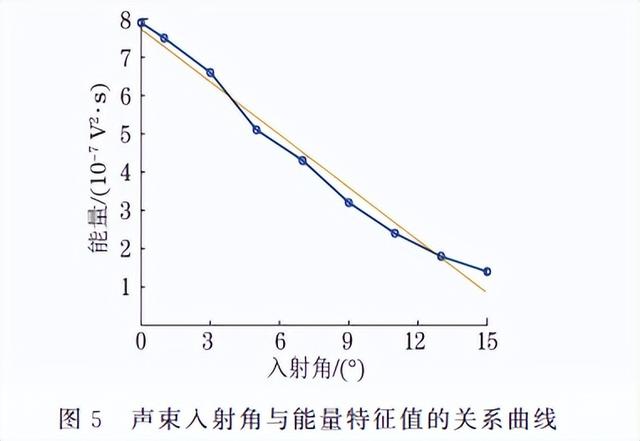
表1为晶片直径为12mm 的5MHz纵波探头 对表面粗糙度(Ra)为12.5的不锈钢钢板进行试验 得到的时域特征值,可见,参数 E 对入射角α 很敏 感,其对应的关系曲线如图5所示。在相同的检测 条件下,可以根据E、hmax 和W 得出相应的α。
由图5可见,随着入射角的增大,反射波的能量 特 征值不断减小,且声束入射角与能量特征值的关系近似可以表示为

5 曲面构件检测试验
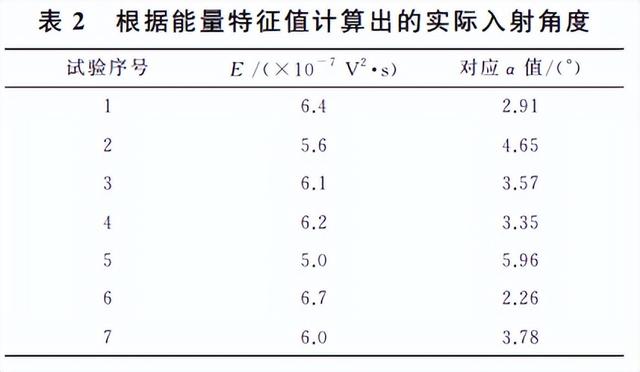
利用上文介绍的探头对正方法进行试验,计算 出每次试验中的能量特征值,并代入到公式中计算 出声束的实际入射角度,得到的结果如表2所示。
6 结语
针对机器人自动化超声检测过程中探头的对正问题,提出了一种基于激光测距的探头自动对正算 法。验证结果表明,该对正算法的平均误差最大不 超过6°,且获得的超声回波信号质量较好,完全满 足曲面工件超声检测的要求。
参考文献:
[1] 敬人可,李建增,周海林.超声无损检测技术的研究进 展[J].国外电子检测技术,2012,31(7):28-30,34.
[2] 禹岳,李立鸿,钟敏,等.挤压棒材的机器人超声无损 检测系统[J].无损检测,2021,43(7):74-78.
[3] 徐春广,张 翰 明,郭 灿 志,等.机 械 手 无 损 检 测 技 术 [J].电子机械工程,2017,33(2):1-12.
[4] 孙广开,曲道明,周正干.机器人辅助激光超声检测系 统的设计与实现[J].压电与声光,2017,39(5):780- 783.
[5] 徐春广,马朋志,肖定国,等.航空发动机叶片机械手无 损检测技术[J].航空制造技术,2019,62(14):42-48.
[6] 吴思源,周晓军,李凌,等.基于超声测距的自由曲面 数字化方法研 究 [J].中 国 机 械 工 程,2006,17(22): 2374-2378.
[7] 刘方芳.基于机械手的叶片扫查超声检测技术[D]. 北京:北京理工大学,2016.
[8] 刘希玲,吕铎,李雄兵,等.基于超声检测模型的镁合 金弹壳自动检测 方 法[J].湖 南 大 学 学 报(自 然 科 学 版),2015,42(10):54-58.
[9] 杨辰龙,周晓军.复杂曲面工件的超声无损检测系统 研制[J].中国机械工程,2005,16(18):1622-1625.
[10] 李信良.超声检测机械手运动控制及仿真[D].北京: 北京理工大学,2015.
[11] 徐春广,王洪博,肖定国.大型曲面复合材料超声检测 技术[J].纤维复合材料,2013,30(3):33-38.
<文章来源 > 材料与测试网> 期刊论文 > 无损检测 > 44卷 > 7期 (pp:46-49)>
相关参考