松下伺服驱动器说明书(初用松下A6伺服驱动器(2)——参数修改步骤)
Posted
篇首语:知是行的主意,行是知的功夫。本文由小常识网(cha138.com)小编为大家整理,主要介绍了松下伺服驱动器说明书(初用松下A6伺服驱动器(2)——参数修改步骤)相关的知识,希望对你有一定的参考价值。
松下伺服驱动器说明书(初用松下A6伺服驱动器(2)——参数修改步骤)
我们准备用200smart PLC 来控制松下伺服驱动器
- 伺服驱动器的控制目的
用200smart PLC 来控制伺服驱动器来做——位置控制用。
二、200smart PLC的型号
采用ST20晶体管输出PLC来控制伺服驱动器。
- 伺服驱动器参数设置
驱动器用作位置控制功能用,可简单设置以下参数
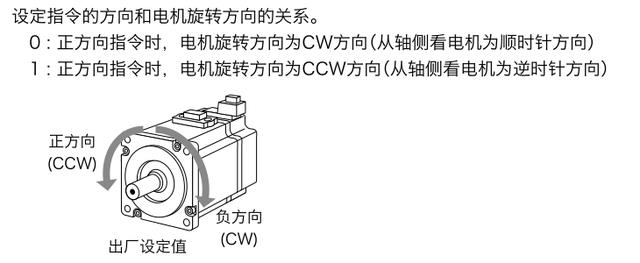
(1)Pr0.00默认是0,设置:保持不变,不用修改
它是设定电机旋转方向与脉冲指令的对应关系的,说明:
- Pr0.01默认是0,设置:保持不变,不用修改
它是伺服驱动工作【控制功能模式设定】

- Pr0.02默认是 1,设置:0
它是实时自动调整设定,默认1为标准设定,0为不自动调整(自动无效)
- Pr0.05默认是0,设置:2
它是指定驱动器上【脉冲输入接口】的选择,要看上位机脉冲是什么输出形式发出的。
由于ST20 PLC是集电极开路输出形式,则用光电耦合器输入设置成【2】
对应驱动器接口如下表:

- Pr0.06默认是0,设置:保持不变,0
它是0或1,确定【方向信号】是得电是正方向还是失电是正方向。
- Pr0.07默认是1,设置:3
它是设置驱动器脉冲输入模式的设置,来决定上位机的发出模式,PLC输出我们一般用【脉冲+方向】方式输出,则设置成0或3都可以。

- Pr0.08默认是10000,设置:5000
它是设置电机每旋转一圈时的脉冲数。只要电机转一圈时的脉冲数为整数,就用Pr0.08参数来设定,不为整数时再用Pr0.09和Pr0.10,此时Pr0.08要设置为0

- Pr0.09和Pr0.10
它们就是我们所说的电子齿轮比,Pr0.09为分子,Pr0.10为分母。此时Pr0.08要设置为0
这此我们不用Pr0.09和Pr0.10

- 设置以上参数步骤
- 通电,正常显示:

(2)按一下【S】键,则显示:d 0 1 S P d

(3)按一下【M】键,则显示:0号参数

- 按向上【▲】键,到2号参数,则显示:

这个参数不是需断电才生效的参数
- 按一下【S】键,则显示出2号参数的出厂数值【1】,通过【▼】键,修改成【0】。

- 再长按【S】键,恢复成2号参数画面:

(7)按一次【M】键,画面变成存储画面

- 再按【S】键,确定,变成以下画面

- 长按【▲】键,自动存储参数,变成以下画面,表示存写完成,F i n i s H 这个符号表明完成并表示不需要断电重启。

(9)重复(4)----(8)修改7号参数,改为3,在长按【▲】键自动存储参数完成之后,画面变成r E SET,而不是F in i Sh,表示7号参数需要断电重启才能生效。

- 同样改8号参数,10000改为5000,需要断电重启。
按照以上步骤,把2、5、7、8的参数修改完成,下一步就可与PLC接线,编程运行了。
相关参考
松下伺服驱动器参数表(初用松下A6伺服驱动器(4)——伺服测试及输入输出信号状态说明)
...PLC输出为PNP输出,则COM+需接到24V负极上。PLC输出Q端可给驱动器输入端给控制信号。33号端子【INH】—【指令脉冲禁止输入】正常情况下接【常闭】开关。由于设置参数Pr5.18为【无效】设置可以不接上。同理,8、9正负方向限位端...
松下马达(初用松下A6伺服驱动器(4)——伺服测试及输入输出信号状态说明)
...PLC输出为PNP输出,则COM+需接到24V负极上。PLC输出Q端可给驱动器输入端给控制信号。33号端子【INH】—【指令脉冲禁止输入】正常情况下接【常闭】开关。由于设置参数Pr5.18为【无效】设置可以不接上。同理,8、9正负方向限位端...
松下a6伺服驱动器参数(初用松下A6伺服驱动器(2)——参数修改步骤)
我们准备用200smartPLC来控制松下伺服驱动器伺服驱动器的控制目的用200smartPLC来控制伺服驱动器来做——位置控制用。二、200smartPLC的型号采用ST20晶体管输出PLC来控制伺服驱动器。伺服驱动器参数设置驱动器用作位置控制功能用...
日本松下继电器(初用松下A6伺服驱动器(4)——伺服测试及输入输出信号状态说明)
...PLC输出为PNP输出,则COM+需接到24V负极上。PLC输出Q端可给驱动器输入端给控制信号。33号端子【INH】—【指令脉冲禁止输入】正常情况下接【常闭】开关。由于设置参数Pr5.18为【无效】设置可以不接上。同理,8、9正负方向限位端...
松下自动门控制器接线图解(初用松下A6伺服驱动器(4)——伺服测试及输入输出信号状态说明)
...PLC输出为PNP输出,则COM+需接到24V负极上。PLC输出Q端可给驱动器输入端给控制信号。33号端子【INH】—【指令脉冲禁止输入】正常情况下接【常闭】开关。由于设置参数Pr5.18为【无效】设置可以不接上。同理,8、9正负方向限位端...
松下伺服电机驱动器说明书(初用松下A6伺服驱动器(6)—200 SMART回零的4种寻找动作(1))
在使用松下伺服做位置控制时,都需要做回参考点(零点)操作,用200SMARTPLC运动向导时,参考点的使用必不可少,向导中寻找参考点的搜索方式有4种,它们有什么区别,设备回零的动作是什么,下面分别实验说明:设备布局如...
松下a6伺服电机调试(松下伺服驱动器维修常见问题及解决方法,收藏)
...HMA2KW,试机时一上电,电机就振动并有很大的噪声,然后驱动器出现16号报警,该怎么解决?这种现象一般是由于驱动器的增益设置过高,产生了自激震荡。请调整参数No.10、No.11、No.12,适当降低系统增益。(请参考《使用说明书...
松下伺服驱动参数设定表(「松下A6系列伺服使用手册」6出现问题时)
...回复1,可免费获取海量资源下载链接TheEnd.往期文章:【松下A6系列伺服使用手册】5.调整【松下A6系列伺服使用手册】4.设定【松下A6系列伺服使用手册】3.连接【松下A6系列伺服使用手册】2.安装【松下A6系列伺服使用手册】1.在...
松下伺服电机,松下伺服驱动器参考资料型号繁杂,本文对市场目前使用最多的几种型号给予总结归纳,供广大维修调试使用人员参考。视频加载中...1,最常用类型驱动器A系列,A4系列,A5系列A6系列比较新,普及率不太高,A4...
松下a6伺服故障代码(一个月烧毁了15台伺服驱动器,是质量问题吗?工控案例分享)
今天给大家分享一个关于伺服驱动器的工控实例.去年制作了一套非标自动化设备,该设备是一套可整体移动的精确定位的送料系统,传动机构使用的是齿轮齿条,因为有较高的定位精度需求,所以电气部分使用了伺服系统,我选择...