松下伺服驱动器原点设置(云工控资讯:如何实现松下伺服电机的上位控制?)
Posted
篇首语:努力吧,只有站在足够的高度才有资格被仰望。本文由小常识网(cha138.com)小编为大家整理,主要介绍了松下伺服驱动器原点设置(云工控资讯:如何实现松下伺服电机的上位控制?)相关的知识,希望对你有一定的参考价值。
松下伺服驱动器原点设置(云工控资讯:如何实现松下伺服电机的上位控制?)
伺服驱动器接受控制器的控制指令,然后通过动力线缆驱动伺服电机,而伺服电机的实时位置,通过编码器线缆反馈至伺服驱动器,形成闭环控制。很显然,这种模式下,伺服驱动器仅仅上充当了放大器的角色,这是绝大部分伺服的工作模式,比如松下、安川,富士,三菱,台达等等。
还有部分伺服驱动器内置控制器功能,可以在驱动器内部进行编程,实现运动控制,能实现电子凸轮,相位同步等等高级运动控制功能等
脉 冲 控 制
上位机通过发送脉冲到伺服驱动器,来实现控制。在这种方式下,用脉冲频率来控制速度,用脉冲个数来控制位置。同样,伺服驱动器也会发送脉冲数,来告诉上位机,伺服电机的位置和速度。
比如,我们约定伺服电机10000个脉冲旋转一圈,那么,当上位机发送10000个脉冲,伺服电机旋转一圈,实现位置控制。如果上位机在一分钟内发完这10000个脉冲,那么伺服电机的速度就是1r/min,如果实在一秒钟内发完,那么伺服电机的速度就是1r/s,也就是60r/min。
低端PLC,数控系统,以及各种单片机系统一般都是采用这种模式,简单易行,成本低廉。很显然,当伺服轴数增加,这种控制方式的缺点就会显现出来,上位机硬件成本会增加,配线会很复杂,而且现场EMC不好的话,脉冲极易丢失。所以,这种模式一般适合用在轴数比较少的场合。
模 拟 量 控 制
上位机通过发送模拟量到伺服驱动器,来实现控制。在这种方式下,用模拟量电压的大小来控制电机速度或者转矩。同样,伺服驱动器也可输出送脉冲数,来告诉上位机,伺服电机的位置和速度。
例如,伺服电机3.02号参数设置成500【(r/min)/V】,也就是6V就对应3000 r/min,电机转速大小根据上位提供提供模拟量大小来决定。伺服电机3.19号参数设置成100,也就是10V对应100%的转矩,电机扭矩大小根据上位提供模拟量大小来决定。
通 讯 方 式
通讯方式就是专门为解决脉冲方式的不足而产生的,已经成为一种发展趋势,他把脉冲数和脉冲频率通过通讯的方式,发送给伺服驱动器,这种方式不但可以传递伺服电机的位置信息,还能传递各种状态信息,比如伺服电机的电流,扭矩以及伺服驱动器的故障代码等等,很显然,当轴数多的时候,这种方式的优势不言而喻。
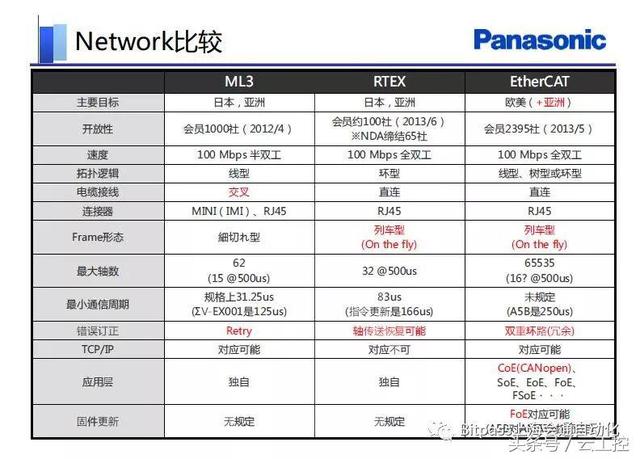
一、RTEX通讯:
RTEX完全满足了高端运动控制高速指令传输、稳定可靠、抗干扰、高同步性的性能要求。这也正是未来设备对总线的核心诉求:高速、高精、高抗噪性能。
而RTEX通过数据进行指令传输,指令可以达到4Gpulse/s,即使以8388608pulse/圈的分辨率运行在6000rpm下都绰绰有余。
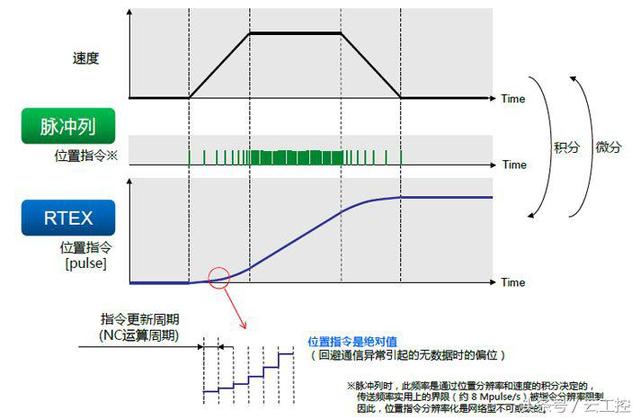
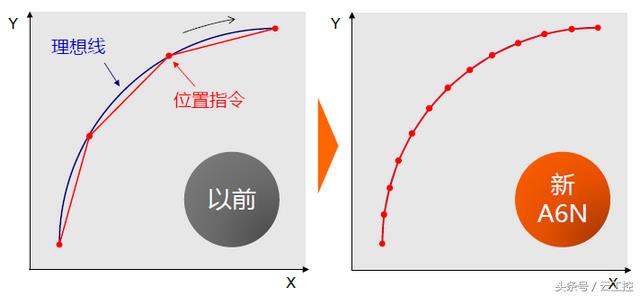
激光加工机、液晶面板点胶机等方面, 可通过进行高速微小的圆弧插补用途提升精度
上图可以很容易理解脉冲指令方式和总线方式指令的区别:
总线可以带来设备性能的巨大提升,因此以往只有非常高级,速度精度要求极高的应用才会选择总线方式,价格也会偏高,且作为高端应用,价格下不来。但是基于当前设备的升级要求,除了半导体、液晶设备、电子元器件贴装设备这类传统高速高精的代表,越来越多的设备,比如机器人、数控机床、纺织经编、锂电光伏、木工、石材等设备开始加入总线控制阵列。高速、高精正是RTEX可以带来的重要价值。
“抗噪性能”是对工业总线的基本的要求
半导体、液晶面板等需要24小时不间断生产的场景,即便是偶发的停机也是不允许的。通信干扰极易引发设备停机,而RTEX在抗噪性能上有着极佳表现,其抗噪技术在各类运控总线中遥遥领先。
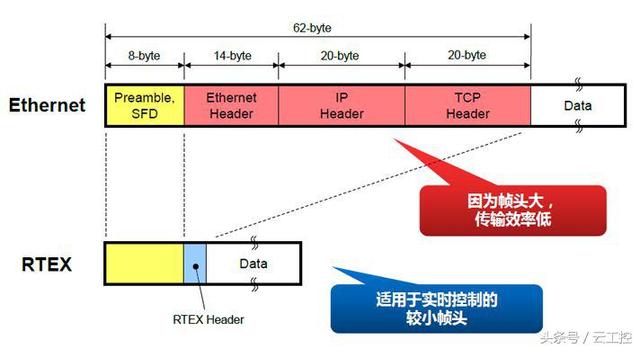
法宝一:更短的数据帧
整个数据帧只留下前部的前导帧头和RTEX帧头,较小的帧头更易于实现实时控制,同时有独特的校验及数据复原算法,相对于冗长的多层以太网数据帧结构,更不易受到干扰。
通过简化通信数据包、实现高速实时控制
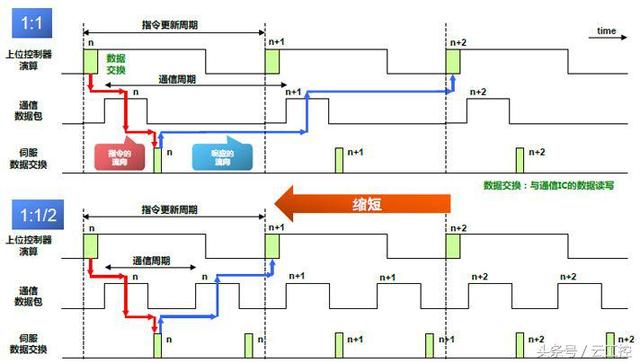
法宝二:冗余数据帧
可以设定指令更新周期和通信周期1:1或者1:2。当设定1:2时,每次指令更行周期发送2次相同的数据帧,从而实现数据帧冗余,即使某一个数据帧发生数据丢失对整体通信也毫无影响。
在指令更新周期不变的情况下缩短通信周期, 相应传达时间将缩短
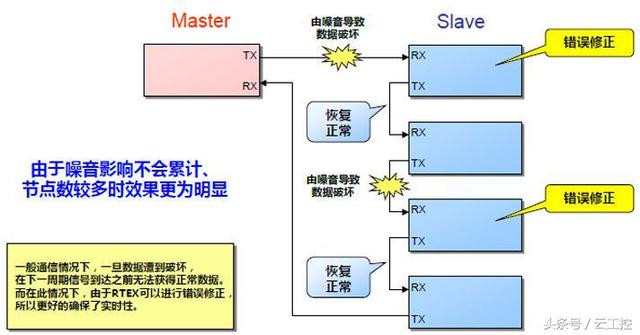
法宝三:已申请专利的数据帧修复功能
数据修复可以保障数据由于噪声干扰受到一定程度破坏的情况下,也可以在该通信周期内将数据复原,这种状况下即使后续数据无法即刻跟上,数据帧也能在同一通信周期内复原,完全不影响整体通信。
每节点处进行错误修正实现高抗噪性
法宝四:环形拓扑结构
保障数据通信的单向环形传输,从而不会因双向传输而占用信道,避免数据交叉产生的影响。
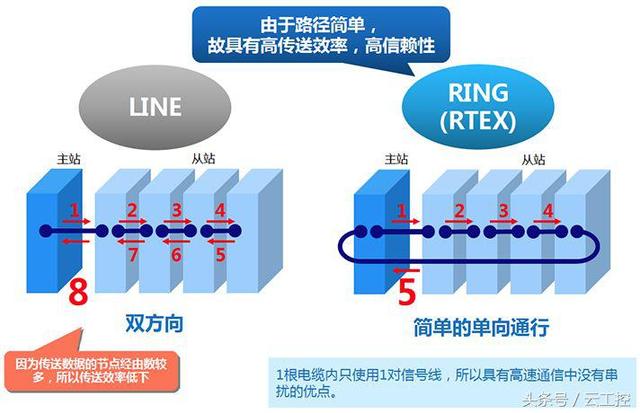
有了上述四项法宝,通信网络的抗噪性能得到充分保障,进而保证设备的稳定性,这也是RTEX总线在对抗干扰问题上,通过多层保障机制,实现“皮实”通信的基础。
二、Ethercat通讯:
- 业界最快的通讯周期 125us
- 不需要专用的硬件、可实现基于PC的主站(上位控制器)
- 可进行各种从站和系统升级
- 实现了高精度的同位控制
三、Modbus通讯方式:
基本配置
PLC:FP-X0 L40MR
伺服:A6SG系列

系统特点
- 性价比高
- PLC无需专用的脉冲通道
- X0系列I/O点数最大可扩展236点
- 控制轴数多(最大31轴)
- 接线方便,减少配线
- 及时反馈轴状态
- 伺服参数可读写
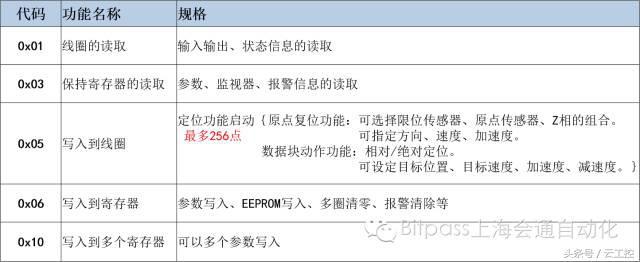
- 可执行定位(增量式/绝对式)
- 可执行回原点
- 每轴最多256条定位指令
串行通信控制模式
- 对应多种PLC支持的开放网络“MODBUS-RTU”
- 对应RS232/RS485两种通信
- 可以定位、收集来自上们的驱动信息(负载率及寿命作息等)、参数的写入
X2通信口引脚定义

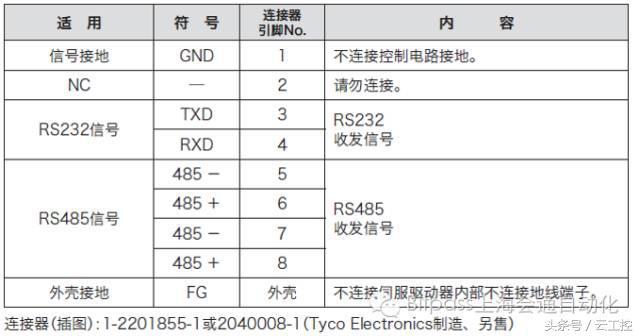
MODBUS RTU可对应通信波特率[ bps]
2400、4800、9600、38400、19200、57600、115200、230400
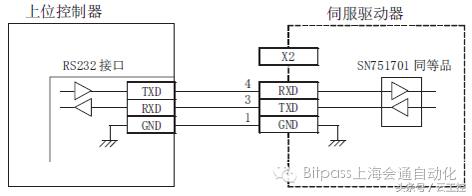
使用RS232物理层的情况
将Pr5.37[Modbus连接设置]设置为1,可以通过RS232进行1:1的Modbus通信。
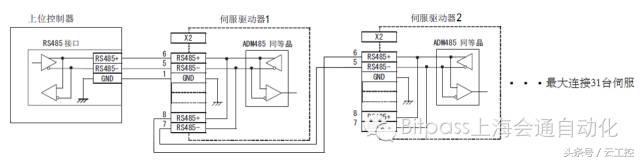
使用RS485物理层的情况
将Pr5.37[Modbus连接设置]设置为2,可以通过RS485进行1:N的Modbus( N最大31轴
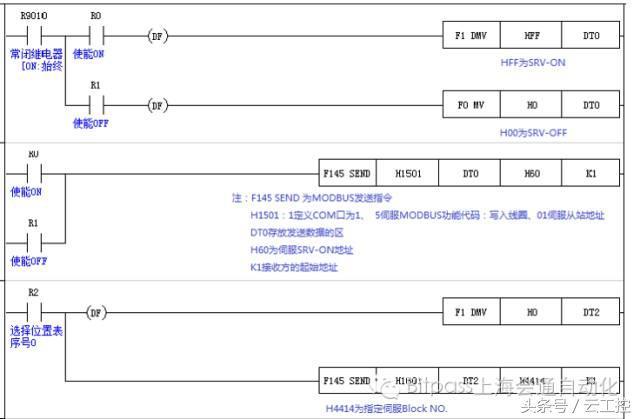
可作MODBUSRTU的驱动器

松下PLC用MODBUSRTU控制A6驱动器示例程序1
关于云工控:
专业的工控产品采购服务平台,致力为工控自动化企业提供在线产品采购服务,采购免费发布询价、帮助采购找现货、产品代采购,为企业优化库存销售的全方位服务平台。让工业电气产品采购省时、省心、省钱!
相关参考
松下a4伺服驱动器方向参数(工控达人们,松下伺服的这些问题,你们知道么?)
...电机又分为普通三相异步电动机,步进电机,闭环步进,伺服电机,直线电机等等。在现在的自动化设备中,步进和伺服的应用场合极为广泛,是自动化行业中重要的动力元件。步进电机属于开环控制,精度不高,当步进电机过...
松下a6伺服故障代码(一个月烧毁了15台伺服驱动器,是质量问题吗?工控案例分享)
今天给大家分享一个关于伺服驱动器的工控实例.去年制作了一套非标自动化设备,该设备是一套可整体移动的精确定位的送料系统,传动机构使用的是齿轮齿条,因为有较高的定位精度需求,所以电气部分使用了伺服系统,我选择...
松下伺服回原点方向怎么设置(2019年了,如果你不懂得控制伺服,那你就OUT了)
...有众多的优点,如不会像步进电机一样会产生失步,因为伺服电机的后面带了一个旋转编码器,旋转编码器可以用来判断伺服电机再接收到脉冲后,是否进行了相应的运动。而且伺服电机运行速度高,再额定的转速下,输出的转...
松下伺服驱动器手动怎么设置(松下伺服电机调整电机负载如何设置)
松下伺服电机代理—日弘忠信今天给大家讲讲松下伺服电机调整电机负载如何设置?a5伺服电机报警处理方法。a5伺服报警处理方法 原因:参数设置不太合理,负载系数小;运行时,无法克服平衡板的弹力,至使下压不到位...
松下a4驱动器参数表(松下伺服驱动器参数设置与常见故障解决分析)
松下伺服参数共有200多个,但一般的控制场合只需要掌握少数几个即可。伺服系统有位置控制、速度控制、转矩控制以及三者的组合等多种控制模式,但大多数场合都是将伺服系统用于精密定位,其次是转矩控制,速度控制则...
松下伺服电机常用参数(伺服驱动器上电就烧毁?一个月烧掉15台设备到底是什么原因?)
今天给大家分享一个关于伺服驱动器的工控实例.去年制作了一套非标自动化设备,该设备是一套可整体移动的精确定位的送料系统,传动机构使用的是齿轮齿条,因为有较高的定位精度需求,所以电气部分使用了伺服系统,我选择...
松下伺服驱动器说明书(初用松下A6伺服驱动器(2)——参数修改步骤)
我们准备用200smartPLC来控制松下伺服驱动器伺服驱动器的控制目的用200smartPLC来控制伺服驱动器来做——位置控制用。二、200smartPLC的型号采用ST20晶体管输出PLC来控制伺服驱动器。伺服驱动器参数设置驱动器用作位置控制功能用...
松下a6伺服驱动器参数(初用松下A6伺服驱动器(2)——参数修改步骤)
我们准备用200smartPLC来控制松下伺服驱动器伺服驱动器的控制目的用200smartPLC来控制伺服驱动器来做——位置控制用。二、200smartPLC的型号采用ST20晶体管输出PLC来控制伺服驱动器。伺服驱动器参数设置驱动器用作位置控制功能用...
松下伺服驱动器参数设置保存(如果你不懂的控制伺服,那你就OUT了)
...有众多的优点,如不会像步进电机一样会产生失步,因为伺服电机的后面带了一个旋转编码器,旋转编码器可以用来判断伺服电机再接收到脉冲后,是否进行了相应的运动。而且伺服电机运行速度高,再额定的转速下,输出的转...
松下伺服16.0报警原因(伺服驱动器上电就烧毁?一个月烧掉15台设备到底是什么原因?)
今天给大家分享一个关于伺服驱动器的工控实例.去年制作了一套非标自动化设备,该设备是一套可整体移动的精确定位的送料系统,传动机构使用的是齿轮齿条,因为有较高的定位精度需求,所以电气部分使用了伺服系统,我选择...