松下伺服回原点方向怎么设置(2019年了,如果你不懂得控制伺服,那你就OUT了)
Posted
篇首语:饱带饥粮,晴带雨伞。本文由小常识网(cha138.com)小编为大家整理,主要介绍了松下伺服回原点方向怎么设置(2019年了,如果你不懂得控制伺服,那你就OUT了)相关的知识,希望对你有一定的参考价值。
松下伺服回原点方向怎么设置(2019年了,如果你不懂得控制伺服,那你就OUT了)
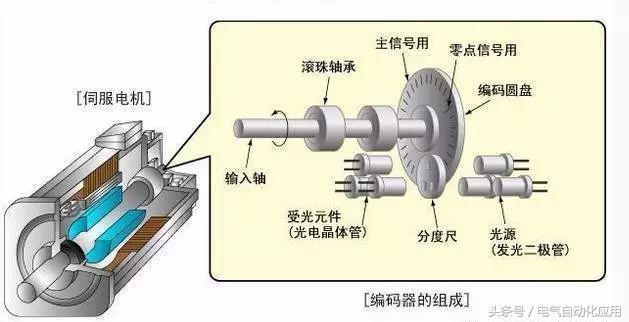
在自动化设备的研发中,最不能缺少的动力执行器件就是伺服控制系统了。伺服拥有众多的优点,如不会像步进电机一样会产生失步,因为伺服电机的后面带了一个旋转编码器,旋转编码器可以用来判断伺服电机再接收到脉冲后,是否进行了相应的运动。而且伺服电机运行速度高,再额定的转速下,输出的转矩为额定的。下面先上一张松下伺服的电机图。

松下伺服电机外形图
现在市面上流行的为松下A5II系列或者是松下A6系列伺服。松下A6系列伺服的编码器不仅可以作为增量式编码器使用。而且在加装上电压为3.6v的锂电池之后,还能作为绝对式编码器使用。小伙伴们应该要知道,步进电机的使用需要驱动器。伺服电机的使用也离不开驱动器。松下伺服驱动器有多种功能的驱动器。其中最简单的驱动器只具备位置控制功能。也就是说,只能用来控制伺服走位置,其中伺服控制器的型号(A6系列)以SE为结尾。另外一种控制器的型号以SG为结尾,此种控制器相比位置控制器而言,除了能够进行位置控制以外,还能进行外部设备与控制器之间的通讯。最后一种控制器的型号以SF结尾,此种控制器除了拥有以上功能外,还能进行力矩控制模式,速度控制模式,全闭环控制模式。

松下A6系列伺服控制器
另外给小伙伴们说一点,一定要注意哦。松下系列伺服新的系列伺服可以配老款电机,但是老款的伺服驱动,不能配新款电机,例如,松下A6系列伺服控制器,除了可以控制A6系列的伺服,还能控制A5II,A5系列的伺服电机,但A5II,A5系列伺服控制器却不能控制A6系列的伺服电机。
那么接下来和大家聊聊伺服为什么这么精确!
伺服系统(servo mechanism)是使物体的位置、方位、状态等输出被控量能够跟随输入目标(或给定值)的任意变化的自动控制系统。

伺服电机(图1)
伺服电机是指在伺服系统中控制机械元件运转的发动机 。伺服电机转子转速受输入信号控制,并能快速反应,在自动控制系统中,用作执行元件,且具有机电时间常数小、线性度高、始动电压等特性,可把所收到的电信号转换成电动机轴上的角位移或角速度输出。分为直流和交流伺服电动机两大类。
工作原理
1、伺服系统(servo mechanism)是使物体的位置、方位、状态等输出被控量能够跟随输入目标(或给定值)的任意变化的自动控制系统。伺服主要靠脉冲来定位,基本上可以这样理解,伺服电机接收到1个脉冲,就会旋转1个脉冲对应的角度,从而实现位移。
因为,伺服电机本身具备发出脉冲的功能,所以伺服电机每旋转一个角度,都会发出对应数量的脉冲,这样,和伺服电机接受的脉冲形成了呼应,或者叫闭环,如此一来,系统就会知道发了多少脉冲给伺服电机,同时又收了多少脉冲回来,这样,就能够很精确的控制电机的转动,从而实现精确的定位,可以达到0.001mm。

直流和交流伺服电机
1、直流伺服电机分为有刷和无刷电机
有刷电机成本低,结构简单,启动转矩大,调速范围宽,控制容易,需要维护,但维护不方便(换碳刷),产生电磁干扰,对环境有要求。因此它可以用于对成本敏感的普通工业和民用场合。
无刷电机体积小,重量轻,出力大,响应快,速度高,惯量小,转动平滑,力矩稳定。控制复杂,容易实现智能化,其电子换相方式灵活,可以方波换相或正弦波换相。电机免维护,效率很高,运行温度低,电磁辐射很小,长寿命,可用于各种环境。
2、交流伺服电机也是无刷电机,分为同步和异步电机,目前运动控制中一般都用同步电机,它的功率范围大,可以做到很大的功率。大惯量,最高转动速度低,且随着功率增大而快速降低。因而适合做低速平稳运行的应用。
3、伺服电机内部的转子是永磁铁,驱动器控制的U/V/W三相电形成电磁场,转子在此磁场的作用下转动,同时电机自带的编码器反馈信号给驱动器,驱动器根据反馈值与目标值进行比较,调整转子转动的角度。伺服电机的精度决定于编码器的精度(线数)。
交流伺服电机和无刷直流伺服电机在功能上的区别:
交流伺服要好一些,因为是正弦波控制,转矩脉动小。直流伺服是梯形波。但直流伺服比较简单,便宜。
永磁交流伺服电机
永磁交流伺服电机同直流伺服电动机比较的主要优点有:
- 无电刷和换向器,因此工作可靠,对维护和保养要求低。
- 定子绕组散热比较方便。
- 惯量小,易于提高系统的快速性。
- 适应于高速大力矩工作状态。
- 同功率下有较小的体积和重量。
相关参考
...好,我是头条@电气电子技术,欢迎大家的关注和浏览!松下焊接机械手是工业生产常见的机械设备。很多维修人员只懂得修正位置或者做个简单的编程,而不会复位机械原点。复位机械原点,即TCP调整方法,很重要,在面对复...
松下伺服驱动器原点设置(云工控资讯:如何实现松下伺服电机的上位控制?)
...当了放大器的角色,这是绝大部分伺服的工作模式,比如松下、安川,富士,三菱,台达等等。还有部分伺服驱动器内置控制器功能,可以在驱动器内部进行编程,实现运动控制,能实现电子凸轮,相位同步等等高级运动控制功...
松下伺服回原点(松下高速度、高性能、高层级FP-XH系列来袭)
高速度、高性能、高层级FP-XH系列下文将详细介绍FP-XH系列的各个产品,总有一款适合您!01FP-XH通用型基本性能高,功能丰富,阵容强大,用途广泛。产品特点高速·高性能基本命令:5k步内0.04μs/步,扫描周期:5K步内0.5ms默认32k...
松下伺服驱动器参数设置保存(如果你不懂的控制伺服,那你就OUT了)
...,再额定的转速下,输出的转矩为额定的。下面先上一张松下伺服的电机图。松下伺服电机外形图现在市面上流行的为松下A5II系列或者是松下A6系列伺服。松下A6系列伺服的编码器不仅可以作为增量式编码器使
松下伺服电机回原点不准(“新奇特”里的“美美与共”,进博会上将怎样演绎“消费升级”)
新华社上海11月1日电题:“新奇特”里的“美美与共”,进博会上将怎样演绎“消费升级”新华社记者周蕊、王默玲这里有全球最新最潮的首发,也是透视消费升级大机遇的窗口,以这里为原点,展品变身为商品,新品走进首店...
松下伺服电机驱动器说明书(初用松下A6伺服驱动器(6)—200 SMART回零的4种寻找动作(1))
在使用松下伺服做位置控制时,都需要做回参考点(零点)操作,用200SMARTPLC运动向导时,参考点的使用必不可少,向导中寻找参考点的搜索方式有4种,它们有什么区别,设备回零的动作是什么,下面分别实验说明:设备布局如...
摘要本文介绍一种简单桁架机器人的应用。汽车总装生产线使用机器人来搬运沉重座椅,不仅减少了劳动力,而且操作方便,定位精度高。座椅机器人可以根据座椅的大小、传输的远近、摆放的角度来进行调整。柔性化生产在现...
松下a4驱动器方向参数(轻松了解松下伺服驱动器操作及参数写入保存和报警代码的含义)
随着自动化程度的不断提高,松下伺服驱动器作为重要的动力元件,在自动化运用中的地位也不断提高。今天我们就来详细了解一款松下伺服驱动器的操作方法。面板按键的操作1.M键:模式转换,共有4种模式选择。1.监视器模式...
松下a4驱动器参数表(松下伺服驱动器参数设置与常见故障解决分析)
松下伺服参数共有200多个,但一般的控制场合只需要掌握少数几个即可。伺服系统有位置控制、速度控制、转矩控制以及三者的组合等多种控制模式,但大多数场合都是将伺服系统用于精密定位,其次是转矩控制,速度控制则...
伺服压机为什么要回经常性复位文章来源:404一、初次运行程序。第一次运行程序,虽然当前位置可能是0,也有原点信号输入,但系统并不知道原点信号在什么位置,要执行绝对定位,必须要利用回复位指令通过特定的方式搜...