松下伺服内部使能设定(松下伺服电机RS485通讯控制命令)
Posted
篇首语:会当凌绝顶,一览众山小。本文由小常识网(cha138.com)小编为大家整理,主要介绍了松下伺服内部使能设定(松下伺服电机RS485通讯控制命令)相关的知识,希望对你有一定的参考价值。
松下伺服内部使能设定(松下伺服电机RS485通讯控制命令)
松下伺服电机RS485控制调试笔记
步骤:
①如果用RS485模式进行控制
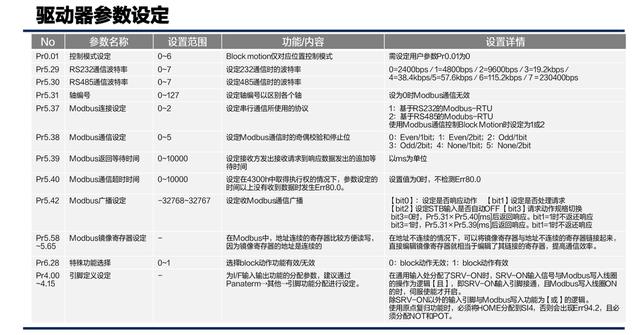
首先要设置Pr5.37=2(用mudbus通讯协议通讯),Pr6.28=1(用mudbus的方式可以控制bolck motion 启动)。如果用的是增量式的编码器block的pn60.55参数要修改为1,注意这个参数是断电重启后有效,如果不确定到底修改成功没有,可以用松下的软件查看(在“其他”中block motion编辑器里查看)。其他的参数默认。默认的是位置模式,默认的波特率是9600,偶校验,数据位8 停止位1。
②打开串口调试助手,发送命令01 05 00 60 FF 00 8C 24
01 :地址1
05:写线圈 参考说明书14页
00 60:线圈地址 参考说明书18页
FF 00:1的意思;00 00 表示0参考说明书18页
8C 24:CRC验证
③设置block motion里的参数
设置速度3000r/min: 01 06 46 00 0B B8 9B C0
设置加速时间10ms : 01 06 46 10 00 0A 1D 40
设置减速时间10ms : 01 06 46 20 00 0A 1D 4F
01 :地址1
06:写寄存器
46 00:速度0寄存器地址 , 0B B8是3000的16进制数值
46 10:加速时间寄存器地址 0A是10的数值
46 20:减速时间寄存器地址
后两位是CRC校验码
④定义一个block0
发送数据:01 06 44 14 00 00 DD 3E
01 :地址1
06:写寄存器
44 14:block0地址
00 00:定义为0
后两位是CRC校验码
⑤block NO0功能定义,总共功能用如图1这么多
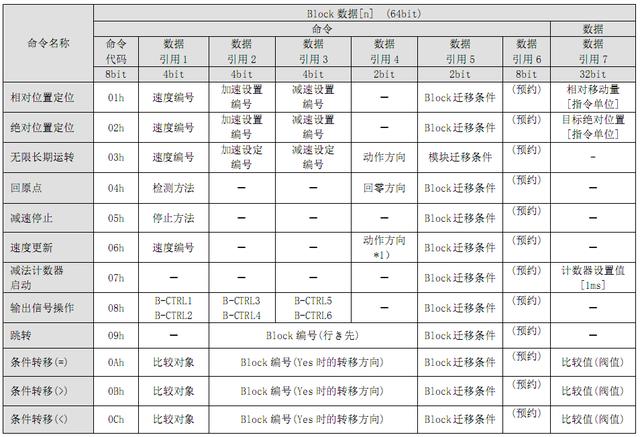
图1
选取相对位置定位举例
发送命令:01 10 48 00 00 04 08 01 00 01 00 00 00 10 00 9A 2F
01 :地址
10:写复数寄存器
48 00:是block0写命令的地址
00 04:寄存器个数
08: 字节个数
01 00 01 00 00 00 10 00 9A 2F:相对位置定位的block数据
01:相对位置命令代码
00:第一个0表示速度编号,第二个0表示加速时间编码
03:第一个0表示减速时间编号0,3可以拆分成数据引用4的两位00,数据引用5的两位(block迁移条件)
00:按要求设置成0
00 00 10 00:相对移动量,需要注意的是这个数据是高位和地位是相反的,实际表示的是10 00 00 00这个二进制数,换成十进制128。这个实际上是表示一个很短的距离。
整个命令结构参考图2
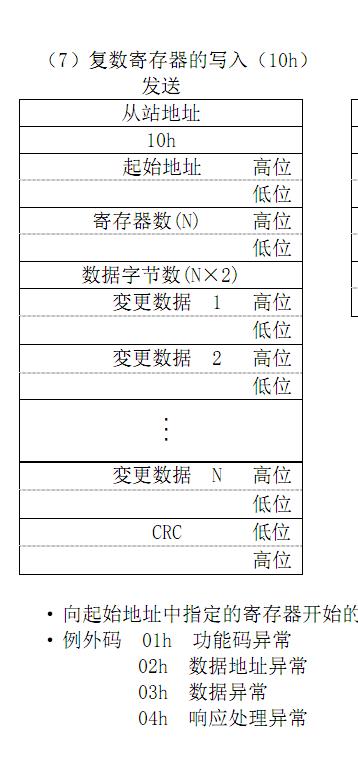
图2
01从站地址10功能码48寄存器地址高位00寄存器地址地位(00 04)寄存器个数4个 08数据字节数4×201 00 01 00 00 00 10 00 9A 2F变更数据1
⑥上一个block motion执行完再执行另外一个block motion
先发命令:01 05 01 20 00 00 CD FC 选通输入(STB)设为0
再发另外的block motion的命令即可。
2021年6月6号补充
要用block motion功能,要准备USB线缆(一头普通USB一头USB mini),因为PN60以后的参数需要在松下调试软件中去设置,然后PIN分配功能在软件中设置要方便一点(虽然在驱动器面板上设置也可以但是还是很不方便)
下载PANATERM软件
2021年8月6号再次补充
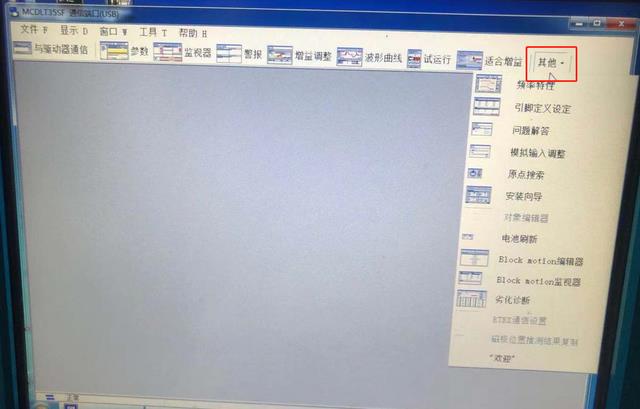
下载了PANATERM软件以后,电气人员就很简单了,直接在软件里面设置好需要的动作就可以了。具体步骤如下:
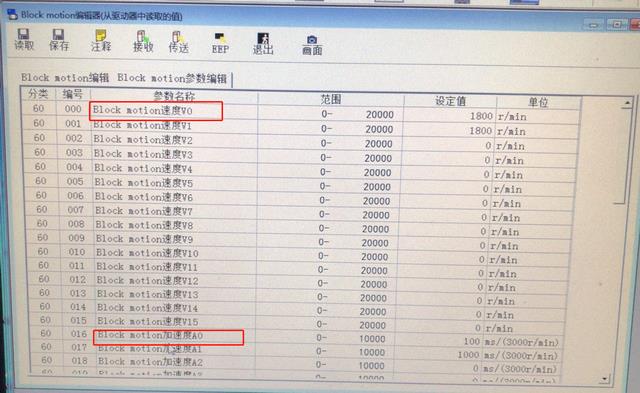
- 进入主界面以后点“其他”按钮会出现下面这个界面,下拉菜单里会有“Block motion编辑器”
- 双击N0.编号,选择需要的动作类型,配置好速度的编号、加速度的编号、减速度的编号,迁移条件等参数
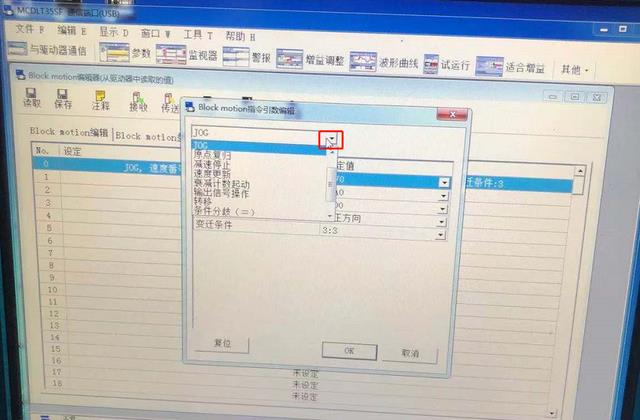
- 在Block motion 参数编辑的菜单里面设置速度、加速时间、减速时间等各个参数的具体值。
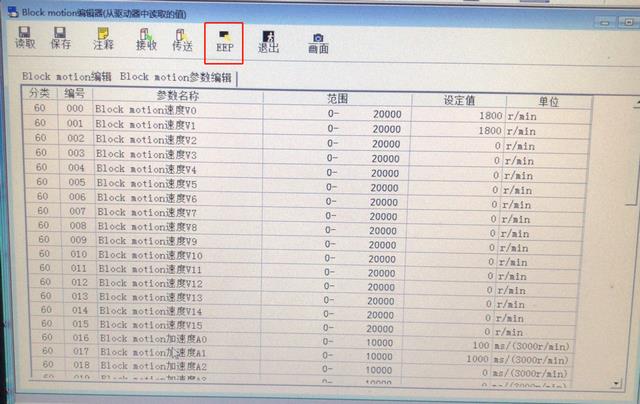
- 设置完成以后保存,直接点击菜单栏上的EEP才能真正的保存住。
全部设置完成以后,需要用串口调试验证各个动作是否符合要求。
第一步:先将电机伺服使能 01 05 00 60 FF 00 8C 24
第二步:选择要启动的Block motion 的NO.号 01 06 44 14 00 00 DD 3E
4414H这个寄存器就是存储Block motion的NO.号,启动Block motion后通过相关的迁移条件,可以实现几个block motion的连续动作。
第三步:再就是选通STB 01 05 01 20 FF 00 8C 0C
这里面有一个比较特殊的Block motion就是Jog:无限长期循环。这个block motion要停止的话,只能用立即停止或者减速停止线圈,立即停止线圈地址是0123H,减速停止线圈地址是0124H,例程如下
01 05 01 23 FF 00 CRC立即停止
01 05 01 24 FF 00 CRC 减速停止
当然这两个停止也能停止其他的Block motion,比如你通过迁移条件实现了无限正反转这种死循环,也可以用这两种停止方式。
硬件方面:电源和电机电源、编码器线缆略过不表,重点说一下信号插口X4,要使驱动器用485实现控制,X4最基本的要接三根线 一根24V、一根0V、一根Serov-on。想实现更多的功能,还可以将上下限位信号也接入,原点信号接入。
参数设置方面:02 10 48 00 00 04 08 04 00 03 00 00 00 00 00 15 33 负方向
正方向:02 10 48 00 00 04 08 00 00 03 00 00 00 00 00 14 C0
相关参考
松下伺服电机无法使能(松下伺服电机选型支持 售后保障更安心)
做网络销售这么久,经常会遇到有很多购买松下伺服电机的新客户,都会特别关心供应商是否能够提供相应的技术服务这个问题。所以,技术服务能力也是衡量一个供应商的实力的重要标准。最近就经常都会接到有些客户需要技...
日本松下交流伺服电机(手把手教你如何配置松下伺服电机速度输出)
参数设置根据在参数所设定的内部速度指令值,进行速度控制,通过使用内部指令速度选择1~3(intspd1~3,)可从最多8个的内部速度指令设定值中进行选择。端子33内部指令速度选择1输入,端子30内部指令速度选择2输入,端子28内...
松下伺服无法使能不报警(步进电机和伺服电机有什么区别?一个应用案例教您使用PLC控制它)
...特点,步进电机才会被广泛的应用到现在的各个行业里。伺服电机驱动器是用
松下a4伺服驱动器(超值干货三菱FX5UPLC和松下A5伺服实现无协议串口通信)
一、系统概述:柳钢某车间一期控制系统主控制器使用松下FPXH系列PLC、主驱动器使用松下A5系列伺服控制器,二期项目立项开工,控制系统主控制器使用三菱FX5U系列PLC,该三菱FX5U系列PLC本体集成1路以太网通信口、1路RS485串行通...
松下驱动器上电后使能就断(国内外伺服驱动器电源板的设计初探——整流滤波软启动电路)
2)整流滤波软启动电路(交---直---交)软启动的目的是为了保护电容,因为开机的那一瞬间,电容相当于短路所以此时流过电容的电流特别大,会对电容造成强烈的冲击,产生大量的热,缩短电容的寿命,严重时可能因为电流...
松下伺服驱动参数设定表(「松下A6系列伺服使用手册」6出现问题时)
...回复1,可免费获取海量资源下载链接TheEnd.往期文章:【松下A6系列伺服使用手册】5.调整【松下A6系列伺服使用手册】4.设定【松下A6系列伺服使用手册】3.连接【松下A6系列伺服使用手册】2.安装【松下A6系列伺服使用手册】1.在...
松下伺服驱动器说明书(初用松下A6伺服驱动器(2)——参数修改步骤)
我们准备用200smartPLC来控制松下伺服驱动器伺服驱动器的控制目的用200smartPLC来控制伺服驱动器来做——位置控制用。二、200smartPLC的型号采用ST20晶体管输出PLC来控制伺服驱动器。伺服驱动器参数设置驱动器用作位置控制功能用...
松下a6伺服驱动器参数(初用松下A6伺服驱动器(2)——参数修改步骤)
我们准备用200smartPLC来控制松下伺服驱动器伺服驱动器的控制目的用200smartPLC来控制伺服驱动器来做——位置控制用。二、200smartPLC的型号采用ST20晶体管输出PLC来控制伺服驱动器。伺服驱动器参数设置驱动器用作位置控制功能用...
头条号私信回复1,可免费获取海量资源下载链接头条号私信回复1,可免费获取海量资源下载链接
松下伺服驱动器报警代码大全(松下伺服电机系统常见的六种故障及解决办法)
伺服电机作为辅助马达间接变速装置,在数控机床类的行业中应用比较广泛,可以由伺服电机本身带动传动机构,最后转化为机床工作台刀具的直线位移或回转位移。而机床性能的优良很大一部分是源于对伺服电机的使用要求,...