松下a4伺服驱动器(超值干货三菱FX5UPLC和松下A5伺服实现无协议串口通信)
Posted
篇首语:非淡泊无以明志,非宁静无以致远。本文由小常识网(cha138.com)小编为大家整理,主要介绍了松下a4伺服驱动器(超值干货三菱FX5UPLC和松下A5伺服实现无协议串口通信)相关的知识,希望对你有一定的参考价值。
松下a4伺服驱动器(超值干货三菱FX5UPLC和松下A5伺服实现无协议串口通信)
一、系统概述:
柳钢某车间一期控制系统主控制器使用松下FPXH系列PLC、主驱动器使用松下A5系列伺服控制器,二期项目立项开工,控制系统主控制器使用三菱FX5U系列PLC,该三菱FX5U系列PLC本体集成1路以太网通信口、1路RS485串行通信口。现今要求二期控制系统主控制器三菱FX5U系列PLC通过通信方式定时读取一期主驱动器松下A5系列伺服绝对式数据(单圈数据和多圈数据),经查松下A5系列伺服通信协议为非Modbus协议,故而三菱FX5U只能通过RS2指令无协议编程实现和松下A5系列伺服串口通信。
二、通信参数约定:
1、三菱FX5U系列PLC通信参数:协议格式为无顺序通信、数据位设置为8位、校验方式设置为偶校验、停止位设置为1位、通信物理层为RS485、通信波特率为9600bps、数据处理模式为16位模式、帧头无添加、帧尾无添加、和校验不添加、无添加回车和换行符、超时时间设置为1000ms,详细设置如下图所示:

2、松下A5系列伺服通信参数:数据位设置为8位、校验方式设置为偶校验、停止位设置为1位、通信物理层为RS485、通信波特率为9600bps、轴编号设置为1。
三、松下A5系列伺服通信协议:
三菱FX5U系列PLC要读取松下A5系列伺服绝对式数据要经过4次通信发送和接收才能完成,其松下A5系列伺服通信协议流程图和数据格式如下两图所示:
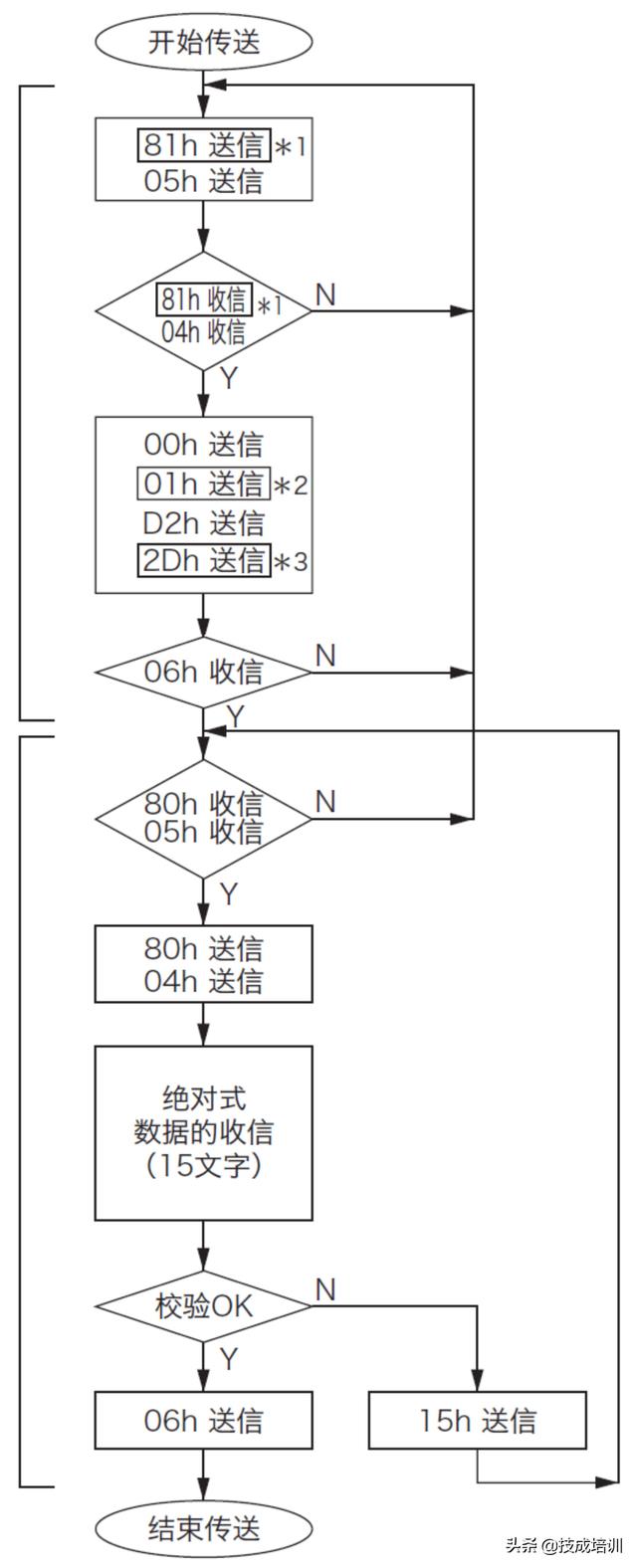
其中通信命令详解如下:
(1)三菱FX5U发送:81 05
(2)松下A5返回:81 04
(3)三菱FX5U发送:00 01 D2 2D(2D为LRC校验码)
(4)松下A5返回:06 或 15
(5)松下A5返回:80 05
(6)三菱FX5U发送:80 04
(7)松下A5返回:0B 01 D2 03 11 00 00 D8 FF 01 00 00 00 00 36(36是LRC校验码)
(8)三菱FX5U返回:06 或 15
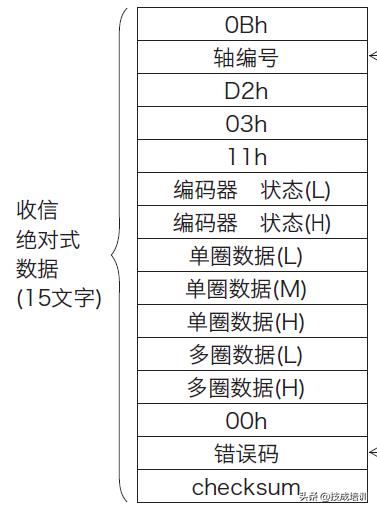
其中数据格式详解如下所示:
以0B 01 D2 03 11 00 00 D8 FF 01 00 00 00 00 36为例说明:
0B:起始符
01:axis轴编号
D2:2为mode命令执行模式、D为command控制命令
03:编码器ID低8位
11:编码器ID高8位
00:编码器状态低8位
00:编码器状态高8位
D8:单圈数据低8位
FF:单圈数据中8位
01:单圈数据高8位
00:多圈数据低8位
00:多圈数据高8位
00:固定为0
00:错误码,无错时为00
36:前14个字节的LRC校验码
四、三菱FX5U系列PLC通信编程详解:
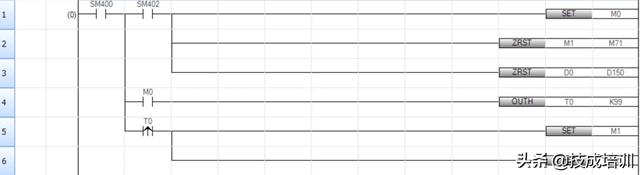
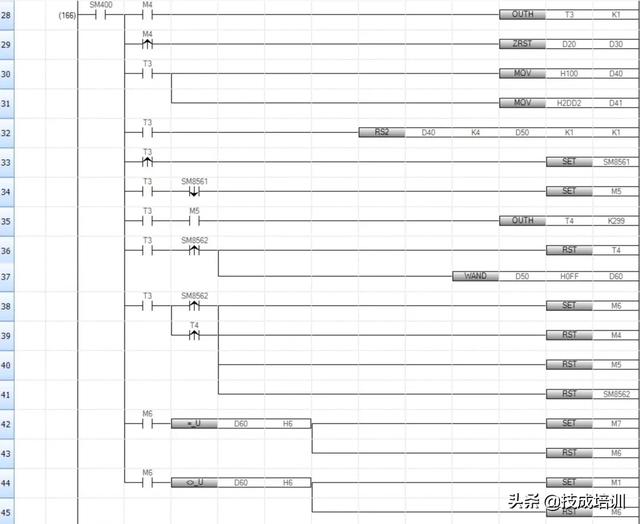
1、初始化程序命令段:上电初始化时置位M0、复位其他所有标志位和寄存器,M0置位后开始延时,延时时间到达时置位M1、复位M0,M1置位后开始执行和松下A5伺服串口通信程序段,程序梯形图如下图所示:
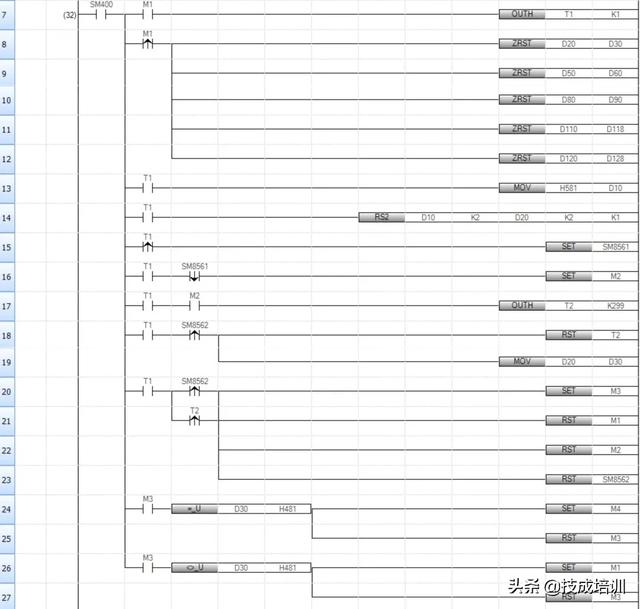
2、通信命令程序段1:RS2指令发送缓冲区首地址为D10、发送字节计数为2、接收缓冲区首地址为D20、接收字节计数为2,标志位M1置位后开始延时,延时时间到达后,给发送缓冲区依次填写数据81、05,将开始发送标志位SM8561手动置位,发送完成后进入到等待接收程序命令段。如果接收超时则进入到继续定时发送数据H0581程序段;如果接收完成,接收完成标志位SM8562自动置位,判断接收到的数据是否为81 04,如果接收到的数据为81 04则进入到下一个通信命令程序段;如果接收到的数据非81 04则继续定时发送数据81 05,梯形图程序如下图所示:
3、通信命令程序段2:RS2指令发送缓冲区首地址为D40、发送字节计数为4、接收缓冲区首地址为D50、接收字节计数为1,标志位M4置位后开始延时,延时时间到达后依次给发送缓冲区填写数据00 01 D2 2D,将开始发送标志位SM8561手动置位,发送完成后进入到等待接收程序命令段。如果接收完成,接收完成标志位SM8562自动置位,判断接收到的数据是否为06,如果接收到的数据为06则进入到下一个通信命令程序段;如果接收到的数据非H06则进入继续定时发送数据81 05程序命令段,梯形图程序如下图所示:
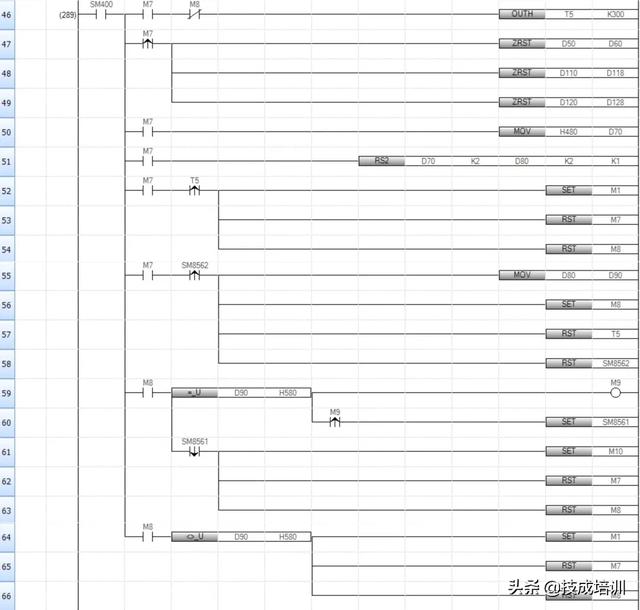
4、通信命令程序段3:RS2指令发送缓冲区首地址为D70、发送字节计数为2、接收缓冲区首地址为D80、接收字节计数为2,标志位M7置位后则进入到等待接收程序命令段,如果接收超时则进入到继续定时发送数据81 05程序段;如果接收到的数据为80 05则开始给松下A5伺服发送80 04,发送完成进入到下一个程序命令段;如果接收到的数据非80 05则进入到继续定时发送数据81 05程序命令段,程序梯形图如下图所示:
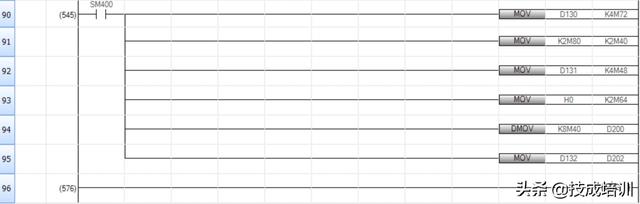
5、松下A5伺服绝对式数据的处理与保存:D130、D131、D132等3个寄存器中保存的是松下A5伺服单圈数据和多圈数据的原始值,经过数据处理,D200和D201组成的32位寄存器中保存的是单圈数据、D202保存的是多圈数据,程序梯形图如下图所示:
五、松下A5系列伺服通信测试:
使用USB转RS485电缆连接电脑和松下A5系列伺服,串口调试助手通信测试命令如下所示:
串口调试助手发送:81 05、松下A5伺服返回81 04
串口调试助手发送:00 01 D2 2D、松下A5伺服返回06
松下A5伺服发送:80 05、串口调试助手返回80 04
松下A5伺服发送:0B 01 D2 03 11 00 00 D8 FF 01 00 00 00 00 36、串口调试助手返回06
以上说明,松下A5伺服通信测试无误。

六、三菱FX5U系列PLC通信测试:
使用USB转RS485电缆连接电脑和三菱FX5U系列PLC,串口调试助手通信测试命令如下所示:
三菱FX5U发送:81 05、串口调试助手返回81 04
三菱FX5U:00 01 D2 2D、串口调试助手返回06
串口调试助手发送:80 05、三菱FX5U返回80 04
串口调试助手发送:0B 01 D2 03 11 00 00 D8 FF 01 00 00 00 00 36、三菱FX5U返回06
以上说明,三菱FX5U通信测试无误。

七、系统联调:
将三菱FX5U系列PLC和松下A5系列伺服连接起来,通信测试后,发现PLC可以定时读取到伺服绝对式数据,并可将读取到的绝对式数据保存至指定的寄存器中,通信已然成功。
相关参考
松下a4驱动器参数设置脉冲(PLC脉冲接线方式有哪些?加电阻?看此文足矣(上篇步进篇))
...点赞哦!!本文分为上下两篇,上篇主要给大家讲解步进驱动器的脉冲接线方式,以雷塞DM556步进驱动器为例讲解;下篇主要给大家讲解伺服驱动器的脉冲接线方式,以松下A6通用型伺服驱动器为例,话不多说,下面开始干货。...
松下a4驱动器参数表(松下伺服驱动器参数设置与常见故障解决分析)
松下伺服参数共有200多个,但一般的控制场合只需要掌握少数几个即可。伺服系统有位置控制、速度控制、转矩控制以及三者的组合等多种控制模式,但大多数场合都是将伺服系统用于精密定位,其次是转矩控制,速度控制则...
松下a4伺服驱动器方向参数(工控达人们,松下伺服的这些问题,你们知道么?)
对于工控行业来说,运动控制处于核心地位。而运动控制的核心执行器件就是电机,电机又分为普通三相异步电动机,步进电机,闭环步进,伺服电机,直线电机等等。在现在的自动化设备中,步进和伺服的应用场合极为广泛,...
松下a4伺服驱动器正反转参数(伺服驱动器功能参数设置与实操训练课程)
伺服驱动器功能参数设置与实操训练授课老师:本课以松下MINASA5系列伺服驱动器为样本,全面详细的讲解驱动器的功能参数的含义和实际应用。通过这一课程学课时内容课时介绍第1课时.前言01为什么要学习这门课,初学者在学...
松下a4驱动器方向参数(轻松了解松下伺服驱动器操作及参数写入保存和报警代码的含义)
随着自动化程度的不断提高,松下伺服驱动器作为重要的动力元件,在自动化运用中的地位也不断提高。今天我们就来详细了解一款松下伺服驱动器的操作方法。面板按键的操作1.M键:模式转换,共有4种模式选择。1.监视器模式...
松下伺服接线(三菱伺服 MR-JET系列01 主电路及控制电路接线)
1.主电路的接线(CNP1)驱动器电源只有L1、L2、L3接线端,与松下和汇川不同没有控制电源L1C、L2C,控制电源已经内置到驱动器内部,减少了接线的工作量。750W(含)及以下选择单相交流220V供电,750W(不含)以上选择三相交流220V供...
松下伺服驱动器原点设置(云工控资讯:如何实现松下伺服电机的上位控制?)
伺服驱动器接受控制器的控制指令,然后通过动力线缆驱动伺服电机,而伺服电机的实时位置,通过编码器线缆反馈至伺服驱动器,形成闭环控制。很显然,这种模式下,伺服驱动器仅仅上充当了放大器的角色,这是绝大部分伺...
松下伺服驱动器使用手册(云工控资讯:如何实现松下伺服电机的上位控制?)
伺服驱动器接受控制器的控制指令,然后通过动力线缆驱动伺服电机,而伺服电机的实时位置,通过编码器线缆反馈至伺服驱动器,形成闭环控制。很显然,这种模式下,伺服驱动器仅仅上充当了放大器的角色,这是绝大部分伺...
松下a6伺服驱动器接线图(PLC脉冲接线方式有哪些?加电阻?看此文足矣(下篇伺服篇))
...的朋友请关注小编为小编点赞哦❤❤,本章以松下A6伺服驱动器(通用型)作为讲解模型,废话不多说开始干货。松下A6伺服驱动器一、PLC对伺服驱动器的位置控制方式有哪些?控制方式主要分为两种:a、PLC脉冲IO口直接向伺服...
松下伺服驱动器选型手册(如何选择合适的伺服电机?这篇文章告诉你)
私信“干货”二字,即可领取138G伺服与机器人专属及电控资料!导读自动化领域指如今的大热门,而伺服电机在其中占有重要地位,通常用于项目中较精确的速度或位置控制部件的驱动。自动化设备的设计者常常需要面临各种...