机械手控制系统原理图(机械手的关节,靠什么连接的?为什么可以实现精准运动?附3d模型)
Posted
篇首语:实践是知识的母亲,知识是生活的明灯。本文由小常识网(cha138.com)小编为大家整理,主要介绍了机械手控制系统原理图(机械手的关节,靠什么连接的?为什么可以实现精准运动?附3d模型)相关的知识,希望对你有一定的参考价值。
机械手控制系统原理图(机械手的关节,靠什么连接的?为什么可以实现精准运动?附3d模型)
点击上方“机械设计一点通”关注我们,每天学习一个机械设计相关知识点
不论是3轴还是6轴的机械手,采用的都是交流伺服电机,并且都是带刹车的。
编码器一般都是绝对值的。不是绝对值的电机,每次停机后存在一个回零的问题。
机械手都要用到减速器的。
早期进口的ABB的机械手大都用他们自己制造的齿轮机构减速。
6轴工业机器人的1、2、3轴用的都是RV减速机,属于摆线针轮结构。4、5、6轴一般采用谐波减速机。由于轴承是特制的,这种摆线针轮的RV减速机轴向尺寸很短。国内用的比较多的是日本人帝人公司的这种减速机。轴向尺寸比较短的伺服电机有日本的发那科,国内广州数控也有专门为他们自己公司工业机器人配套的伺服电机,较他们传统的伺服电机轴向尺寸短很多。
什么是RV减速机

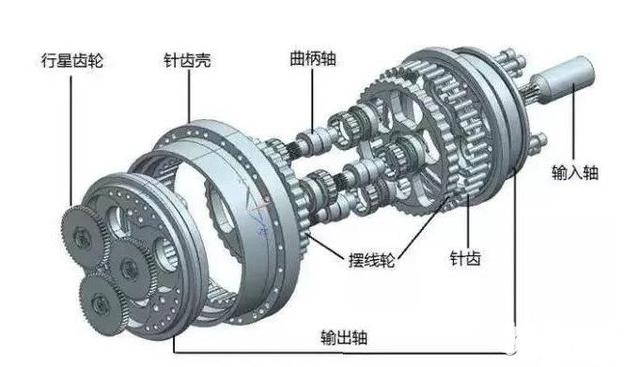
RV 传动是在摆线针轮传动基础上发展起来的一种新型传动。
RV 减速机是由渐开线圆柱齿轮行星减速机构和摆线针轮行星减速机构二部分构成。
渐开线行星齿轮与曲柄轴连成一体,作为摆线针轮传动部分的输入。
曲柄轴带动摆线轮作偏心运动。
曲柄轴向顺时针方向旋转 1 周,摆线轮将沿逆时针方向移动 1 个齿。
RV 减速机的核心部件为针齿壳、曲柄轴、摆线轮。
特点:
齿隙小于 1 弧分 抗冲击性强 扭转刚度高
传动比范围大 传动效率高 工作寿命长
用途:
工业机器人、外部轴、精密机床、雷达、医疗器械等高端智能装备行业。 用于转矩大的机器人腿部腰部和肘部三个关节,负载大的工业机器人,一二三轴都是用RV。相比谐波 减速机 , RV减速机 的关键在于加工工艺和装配工艺。RV减速机具有更高的疲劳强度、刚度和寿命,不像谐波传动那样随着使用时间增长,运动精度会显著降低,其缺点是重量重,外形尺寸较大。
什么是谐波减速机
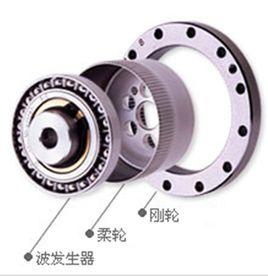
主要由波发生器、柔性齿轮、柔性轴承、刚性齿轮四个基本构件组成,谐波传动减速器,是一种靠波发生器装配上柔性轴承使柔性齿轮产生可控弹性变形,并与刚性齿轮相啮合来传递运动和动力的齿轮传动。 应用学科:机械工程(一级学科);传动(二级学科);齿轮传动(三级学科)谐波齿轮传动减速器是利用行星齿轮传动原理发展起来的一种新型减速器。谐波齿轮传动(简称谐波传动)。 作为减速器使用,通常采用波发生器主动、刚轮固定、柔轮输出形式。

谐波减速机的基本特点
1.承载能力高 谐波传动中,齿与齿的啮合是面接触,加上同时啮合齿数(重叠系数)比较多,因而单位面积载荷小,承载能力较其他传动形式高。
2.传动比大 单级谐波齿轮传动的传动比,可达 i=70~500。
3.体积小、重量轻。
4.传动效率高、寿命长。
5.传动平稳、无冲击,无噪音,运动精度高。
6.由于柔轮承受较大的交变载荷,因而对柔轮材料的抗疲劳强度、加工和热处理要求较高,工艺复杂。
谐波减速器在国内于六七十年代才开始研制,已有不少厂家专门生产,并形成系列化。广泛应用于电子、航天航空、机器人等行业,由于它的独特优点,在化工行业的应用也逐渐增多。
需要下载3d文件的,关注我们,复制文章标题私信小编,即可自动获取下载链接,免费下载
欢迎大家在评论处补充你认为文章中有解释不对或欠缺的部分,这样下一个阅读的人就会学到更多,你知道的正是大家需要的。。。
相关参考
液压机械臂是一种利用液压原理驱动的机械臂,它可以提供高精度、高速度和高灵活性的运动控制。它的工作原理是利用液压发动机的压力,通过液压缸,液压管和液压阀的控制,使机械臂的每个关节运动,从而达到机械臂运动...
...的位置,在汽车中普遍使用,其相当于汽车驱动系统的“关节”部件,传动系统通过万向节使得被连接的零件之间夹角在一定范围内可以有所变化。在前置发动机后轮驱动的车辆上,万向节传动装置安装在变速器输出轴与驱动桥...
气动隔膜阀(气动系统元件动图大全,各种气动系统元件原理讲解)
气动系统是为以压缩气体为工作介质,它通过各种元件组成不同功能的基本回路,再由若干基本回路有机地组合成的整体,进行动力或信号的传递与控制。组成的气动回路是为了驱动用于各种不同目的的机械装置,其最重要的三...
气动阀气缸内部结构图(气动系统元件动图大全,各种气动系统元件原理讲解)
气动系统是为以压缩气体为工作介质,它通过各种元件组成不同功能的基本回路,再由若干基本回路有机地组合成的整体,进行动力或信号的传递与控制。组成的气动回路是为了驱动用于各种不同目的的机械装置,其最重要的三...
工程机械液压多路阀试验台综述①多路换向阀是两个以上阀块的组合,控制多个执行机构的动作。针对不同的液压系统的要求,可组合安全阀、过载阀、补油阀、分流阀、制动阀、单向阀等。它结构紧凑,管路简单,压力损失小...
工程机械液压多路阀试验台综述①多路换向阀是两个以上阀块的组合,控制多个执行机构的动作。针对不同的液压系统的要求,可组合安全阀、过载阀、补油阀、分流阀、制动阀、单向阀等。它结构紧凑,管路简单,压力损失小...
...术制定的原则纲领行动。工业机器人由主体、驱动系统和控制系统三个基本部分组成。主体即机座和执行机构,包括臂部、腕部和手部,有的机器人还有行走机构。大多数工业机器人有3~6个运动自由度,其中腕部通常有1~3个...
...液压系统由基本的回路组成,他表示一个回路的基本工作原理,即系统执行元件所能实现的各种动作。本文讲述阅读液压系统原理图的步骤即需要要注意的事项。最后再举例分析液压设备的液压原理。▼更多精彩内容,请长按二...
焊接机械手的工作原理与应用(别划走,一分钟带您了解焊接机器人)
...于焊接工作的自动机械设备,主要结构包括机器人本体、控制系统、送丝机构、传感器、焊接电源、示教盒等,操作简便。它通过各关节相互配合完
焊接机械手的工作原理与应用(别划走,一分钟带您了解焊接机器人)
...于焊接工作的自动机械设备,主要结构包括机器人本体、控制系统、送丝机构、传感器、焊接电源、示教盒等,操作简便。它通过各关节相互配合完