机械手使用说明书(KUKA机器人示教器的使用)
Posted
篇首语:获致幸福的不二法门是珍视你所拥有的、遗忘你所没有的。本文由小常识网(cha138.com)小编为大家整理,主要介绍了机械手使用说明书(KUKA机器人示教器的使用)相关的知识,希望对你有一定的参考价值。
机械手使用说明书(KUKA机器人示教器的使用)
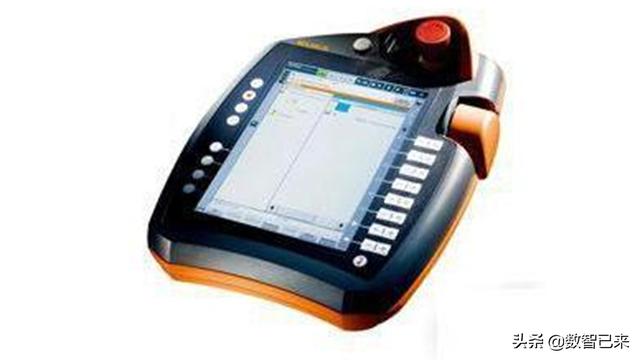
序号 | 说明 |
1 | 用于拔下smartPAD的按钮 |
2 | 用于调出连接管理器的钥匙开关。只有当钥匙插入时方可转动开关。 可以通过连接管理器切换运行模式。 |
3 | 紧急停止键。用于在危险情况下关停机器人。紧急停止键在被按下时将自行闭锁。 |
4 | 3D鼠标。用于手动移动机器人。 |
5 | 移动键。用于手动移动机器人。 |
6 | 用于设定程序倍率的按键 |
7 | 用于设定手动倍率的按键 |
8 | 主菜单按键。用来在 smartHMI 上将菜单项显示出来。 |
9 | 工艺键。主要用于设定工艺程序包中的参数。其确切的功能取决于所安装的工艺程序包。 |
10 | 启动键。通过启动键可启动一个程序。 |
11 | 逆向启动键。用逆向启动键可逆向启动一个程序。程序将逐步运行。 |
12 | 停止键。用停止键可暂停正运行中的程序。 |
13 | 键盘按键。显示键盘,通常不必特地将键盘显示出来,smart HMI可识别需要通过键盘输入的情况并自动显示键盘。 |
14 | 触摸显示屏 |
15 | 确认键。具有三个开关位: Ÿ 未按下 Ÿ 中间位置 Ÿ 全按下 在运行方式 T1 及 T2 下,确认开关必须保持中间位置,这样才可开动机械手。 在采用自动运行模式和外部自动运行模式时,确认开关不起作用。 |
16 | 绿色启动键。通过启动按键,可启动一个程序。 |
17 | USB 接口。被用于存档/ 还原等方面。仅适于 FAT32 格式的 USB。 |
相关参考
一、认识示教器TP(TeachPendant)1、TP的作用(1)点动机器人(2)编写机器人程序(3)试运行程序(4)生产运行(5)查阅机器人的状态(I/O设置,位置,焊接电流)2、认识TP上的键(如下图)(1)StatusInicators(状态指示灯):指...
库卡示教器维修(库卡机器人如何更换及设定KVGA显卡?这些步骤请收下)
在库卡机器人维修当中,经常会遇到KVGA显卡损坏需要更换及设定的问题,今天驼驮小编就来教大家KVGA显卡的更换方法及设定方法,具体请看下文。一、在更换KVGA之前,得先做好以下准备工作:1.机器人控制系统必须保持关断状...
机器人示教器维修(ABB机器人维修常见的故障问题及解决方法是什么?)
ABB机器人维修常见的故障问题及解决方法是什么? 文章来源:http://www.xmzgkwx.com/ ABB机器人维修中常见的故障问题也有很多,那今天小编就为大家简单的介绍下这些故障问题,及解决的方法,希望能帮助到大家。 鉴于...
搬运机械手臂(ABB工业机器人IRB 1410科研版紧凑柜 6六轴焊接搬运码垛 机械手臂)
坚固--及时应用该机器人工作范围大、到达距离长(最长1.44m)。承重能力为5kg,上臂可承受18kg的附加载荷。这在同类机器人中绝无仅有。高速--较短的工作周期机器人本体坚固,配备快速精确的IRC5控制器,可有效缩短工作周期,...
机器人控制系统的构成和原理(弧焊机器人的系统组成和特点详解)
弧焊机器人是指用于进行自动弧焊的工业机器人。弧焊机器人的组成和原理与点焊机器人基本相同。弧焊机器人主要应用于各类汽车零部件的焊接生产。弧焊机器人系统组成一般的弧焊机器人是由示教盒、控制盘、机器人本体及...
机器人保养(艾利特机器人如何进行维护保养?与传统工业机器人有什么不同?)
1、艾利特机器人作为轻型协作型机器人,维护保养工作比较简单,主要内容包括:安全功能检查:周期6个月一次,测试急停按钮、自由拖拽模式和安全IO的功能(若设置)以及碰撞检测;2、目视检查,关节是否存在被污染和腐蚀、...
松下焊枪(盘点十大顶尖焊接机器人品牌:kuka落榜,松下,OTC,CLOOS凸显)
...经非常成熟,如今一台手工焊机仅仅需要2000-3000元。一台机器人专用智能焊接电源也不过万元左右。普及化的金属焊接加工工艺,是造船,集装箱,桥梁建筑,工程机械,汽车及轨道交通等国民经济
焊接机器人操作规程1、旋开气体阀门;新瓶要放半分钟,防止有存水。2、进入机器人系统操作界面后,打开焊机电源;3、将控制柜上主开关旋至"ON"位置,控制器开启。4、对夹具的气路进行检查是否存在漏气等现象。5、...
库卡kuka机器人保养(库卡KUKA机器人外部启动方法步骤)
以下表格是我配置的信号映射机器人输入信号程序号类型PGNO_TYPE1以二进制数值读取程序号镜像REFLECT_PROG_11镜像程序号位字节宽度PGNO_LENGTH8程序号范围为0-255程序编号第一位PGNO_FBIT9IN[9]-IN[16]奇偶位PGNO_PARITY0为0不校验程序编号有效P...
机械手控制系统发展历史机械手控制系统首先是从美国开始研制的。1954年美国戴沃尔早提出了工业机器人的概念,并申请了。该的要点是借助伺服技术控制机器人的关节,利用人手对机器人进行动作示教,机器人能实现动作的...