机器设备装卸移位-汽车吊(装卸搬运设备自动对正系统电控单元设计)
Posted
篇首语:不要以为努力只是自己的事,别忘了生命赐给你的春光!本文由小常识网(cha138.com)小编为大家整理,主要介绍了机器设备装卸移位-汽车吊(装卸搬运设备自动对正系统电控单元设计)相关的知识,希望对你有一定的参考价值。
机器设备装卸移位-汽车吊(装卸搬运设备自动对正系统电控单元设计)
本文选自《起重运输机械》杂志,如需转载,请注明出处
作者:傅笑寒 赵重年 周永良
摘 要:基于某装卸搬运设备自动对正系统模糊控制策略,分析确立了自动对正系统电控单元设计的总体思路,研究了自动对正系统电控单元的硬件选型及自动对正模糊控制算法的程序实现,完成了该装卸搬运设备自动对正系统电控单元的设计,并通过试验数据采集进行了检验验证。
关键词:装卸搬运设备;自动对正系统;电控单元
Abstract: Based on the fuzzy control strategy of the automatic alignment system of a loading and unloading equipment, the overall design idea of the electronic control unit of the automatic alignment system is analyzed and established, the hardware selection of the electronic control unit of the automatic alignment system and the program realization of the fuzzy control algorithm of the automatic alignment are studied, the design of the electronic control unit of the automatic alignment system of the loading and unloading equipment is completed, and such design is verified through test data collection.
Keywords: handling equipment; automatic alignment system; electric control unit
根据某装卸搬运设备的作业场地及作业性能要求,设计了自动对正系统,并在该装卸搬运设备自动对正系统模糊控制策略的基础上[1],研究了该装卸搬运设备自动对正系统模糊控制硬件选型、程序实现及试验验证情况。
1 自动对正电控单元设计思路
自动对正过程中,PLC 利用四个探臂的角度信号计算得到该装卸搬运设备的航向角作为输入,利用航向角进一步计算得到门架机几何中心横向位移作为输入,根据航向角的数值,选择蟹行转向模式或者正常转向模式。若为蟹行转向模式,调用蟹行转向控制程序,从控制器两个端口输出PWM 信号(脉宽调制信号)控制电液比例多路阀阀芯的开度和方向,从而完成蟹行转向对正。若为正常转向模式,经与模糊控制离线数据表比对,调用正常转向控制程序,从控制器两个端口输出PWM 信号控制电液比例多路阀阀芯的开度和方向,从而通过正常转向完成轴线自动对正[2]。该装卸搬运设备转向系统控制由主,由两块PLC 控制器配合实现转向。
2 硬件选型
选用EPEC2024 控制器,如图1 所示。转向控制单元的主、从PLC 控制器之间的通信可通过EPEC2024控制器CAN-BUS 总线实现[3]。主从控制器硬件连接的部分原理如图2 所示。
该装卸搬运设备PLC 控制器安装如图3 所示。主车组PLC 用于自动对正的模拟量输入8 路,其中包括转向轮偏转角4 路和轴线自动对正探臂传感器4 路,开关量输入1 路;副车组PLC 用于自动对正的模拟量输入8 路:转向轮偏转角4 路和轴线自动对正探臂传感器4 路。主车组与副车组输出模拟量均为转向电磁阀8 路。
主PLC 控制器向CAN 总线输出主车组基准轮实际转角,并接收从PLC 控制器副车组实际转角信号,从PLC 接收主PLC 输出信号并输出副车组实际转角信号。控制器之间通过8 芯导线连接,再分别连接在CAN1 和CAN2 上。

图1 EPEC2024PLC 控制器
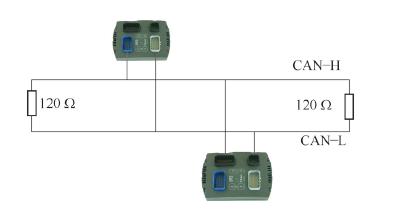
图2 主从控制器硬件连接原理

图3 PLC 实际安装位置图
3 自动对正模糊控制算法程序实现
模糊控制器在PLC 上的实现方法是把模糊控制程序作为整个PLC 控制程序的一个子程序,包括数据的读取、模糊推理和控制信号输出,通过中断调用子程序完成模糊控制[4]。完成自动对正自适应神经网络模糊控制算法设计的基础上,实时控制过程只需计算出输入变量模糊化后的横向位移量和航向角,然后直接查询模糊控制表,获得控制量的变化值,再乘以比例因子,即可以作为输出控制被控对象。
为了在PLC 中实现系统的模糊控制,PLC 程序须具备以下3 个功能:1)输入变量的模糊化处理;2)查询模糊控制表,得到模糊控制器的输出值;3)输出变量的反模糊化处理。即由模糊控制表查询得到的输出值,通过比例因子对其进行反模糊化处理,得出实际的控制量,然后通过PLC 进行输出,对被控对象进行相应控制。
该装卸搬运设备具有运输- 装卸作业转换、20 英尺集装箱和40 英尺集装箱等作业模式以及正常转向、原地转向、蟹行、平移等转向模式[5]。为完成各作业模式和转向模式下的转向控制,编写用户程序,主要包括主循环、变角度转向、固定角度转向和调整转向等子程序模块[6]。本文重点研究主循环模块[5] 中的“其他”程序块,即自动对正转向模式模块,其程序流程如图4 所示。

图4 自动对正模块程序流程图
4 试验数据采集验证
在搭建完成的电控系统上,将设计的自动对正控制算法反映成相应的PLC 控制程序,利用CoDeSys 软件输入PLC 控制器进行试验。
根据检测探臂和主副车组连接摆臂上安装的传感器,调用程序解算出该装卸搬运设备的转向轮转角和预定行驶速度,驱动该装卸搬运设备与集装箱轴线自动对正。利用摄像机记录显示器中装卸搬运设备自动对正过程中转向轮实时转角,整理可得到数据点与其拟合曲线图。从拟合曲线可以看出,完成自动对正的过程中,转向轮实际转角与仿真分析得到的转向轮转角基本吻合。
5 结论
研究了某装卸搬运设备自动对正系统电控单元的整体设计思路、硬件环境和软件编程实现等,将所设计的控制算法应用于实车PLC,并进行了试验验证。结果表明,该装卸搬运设备可以有效完成自动对正,得到的试验结果与仿真结果基本吻合,也证明所述控制算法的合理性和可行性。
参考文献
[1] 白雪峰,李红勋,孟祥德.某集装箱装卸搬运机转向控制算法设计[J].军事交通学院学报,2017,19(6):75-80.
[2] 赵重年,王文强,王青峰.集装箱装卸搬运机自动对正系统运动学分析[J].起重运输机械,2018(10):134-138.
[3] 汪小光.可编程控制器原理及应用[M].北京:机械工业出版社,1994.
[4] 曾光奇,胡均安,王东,等.模糊控制理论与工程应用[M].武汉:华中科技大学出版社,2000.
[5] 赵重年,白雪峰,王文强.集装箱搬运机转向系统控制算法研究[J].起重运输机械,2018(12):109-112.
[6] 牛善田,王青峰,李昊天.专用设备转向系统电控单元设计[J].起重运输机械,2018(6):126-128.
相关参考