机器定位(基于机器视觉系统的白芦笋芽定位算法与采收路径优化)
Posted
篇首语:人不能象走兽那样活着,应该追求知识和美德。本文由小常识网(cha138.com)小编为大家整理,主要介绍了机器定位(基于机器视觉系统的白芦笋芽定位算法与采收路径优化)相关的知识,希望对你有一定的参考价值。
机器定位(基于机器视觉系统的白芦笋芽定位算法与采收路径优化)

图 1 笋芽与垄面相对位置示意图
Fig. 1 Relative position schematic between white asparagus sprouts and ridge surface
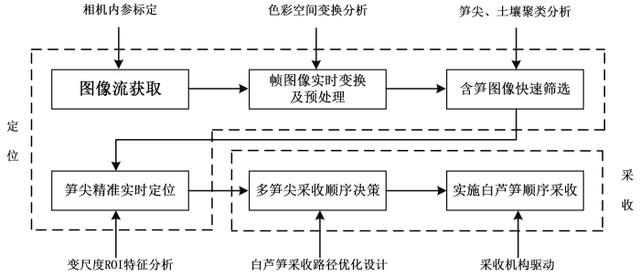
图2 白芦笋机器人采收流程
Fig. 2 Harvesting process of white asparagus robot

图3 图像标定与角点检测
Fig. 3 Image calibration and corner detection



图4 不同时间和天气情景中的白芦笋尖照片
Fig. 4 Photos of white asparagus shoots in different scenes of different time and weather

图5 HSV直方图均值化后的笋尖图片
Fig. 5 Images of white asparagus shoots after HSV histogram averaging

图6 笋尖和土壤对比分析
Fig. 6 Comparative analysis of asparagus shoot and soil


图7 ROI区域判别流程图
Fig. 7 Flow chart of ROI region recognition


图8 笋尖圆度分析结果
Fig. 8 Analysis of asparagus shoot tip roundness

表1 纹理特征参数
Table 1 Values of contour feature parameter


图9 白芦笋尖定位过程
Fig. 9 Positioning process of white asparagus tip
 图10 3个白芦笋采收路径示意图
图10 3个白芦笋采收路径示意图
Fig. 10 Schematic of three white asparagus harvesting paths
在本研究构建的采收系统中,图像采集和白芦笋采收区域为100 cm×80 cm的长方形。由于白芦笋的生长特性决定了每日早晚需要对其及时采收,因此每次采收时采收区内新抽发的笋尖并不多。通过对采集的图片集进行统计,发现由于采收及时,采收区内抽发的笋尖数量通常只有4~5个。假设采收区域有N<8个白芦笋,根据采收流程完成所有白芦笋的采收共有N!×2N条路径可供选择。以区域内有3个白芦笋为例,共有48种不同采收路径,可以建出如图11所示的路径规划决策树。

图11 以3个白芦笋为例的路径规划决策树
Fig. 11 Path planning decision tree with three white asparagus as examples



相关参考
汽油动力草坪机(实现大面积室外精准定位并解决割草难题,「优思美地」面向欧美市场提供割草机器人一体化解决方案)
...*随着AI感知、定位、导航和驱动等技术的不断发展成熟,机器人已经在越来越多的场景中得到应用,并延伸出了各种细分的功能品类。日前,36氪接触到的「优思美地」则是一家开发割草机器人的公司。优思美地成立于2021年,主...
...发展,对供应链和仓储的诸多环节提出了更高要求,移动机器人(AMR)在提供高柔性、高精度、高可靠性搬运服务的同时,更能提升原材料、成品搬运的效率,解决劳动力成本急剧增长带来的挑战,被企业主广泛接受。本文基于...
...发展,对供应链和仓储的诸多环节提出了更高要求,移动机器人(AMR)在提供高柔性、高精度、高可靠性搬运服务的同时,更能提升原材料、成品搬运的效率,解决劳动力成本急剧增长带来的挑战,被企业主广泛接受。本文基于...
松下TA30板卡(有了这一技术后,人被机器取代的可能性更大了工控行业的进步)
机器视觉是通过计算机来模拟人类视觉功能,以让机器获得相关视觉信息和加以理解。可分为“视”和“觉”两部分原理。 “视”是将外界信息通过成像来显示成数字信号反馈给计算机,需要依靠一整套的硬件解决方案,包括...
与视觉引导系统相结合的柔性振动盘,以及机器人抓取,可以解决传统振动盘无法解决的上料问题。可填补微小产品,精密产品的供料空白。柔性振动盘又称柔性上料盘、柔性振盘和柔性供料等,是一种适合工业自动化生产中99%...
测绘设计装置(技术论文|小径管道测绘机器人定位系统设计与实现)
...日投入实际应用显得尤其重要。设计了一种小径管道测绘机器人定位系统,就其关键器件的选择、硬件电路设计、软件系统的开发、整体机械结构设计进行了详细论述,研制出样机,搭建了
测绘设计装置(技术论文|小径管道测绘机器人定位系统设计与实现)
...日投入实际应用显得尤其重要。设计了一种小径管道测绘机器人定位系统,就其关键器件的选择、硬件电路设计、软件系统的开发、整体机械结构设计进行了详细论述,研制出样机,搭建了
无人机室内定位(芬兰研究院开源,专用于远程高空无人机视觉定位,无需GNSS)
以下内容来自如何高效学习机器人SLAM?知识星球每日更新内容点击领取学习资料→机器人SLAM学习资料大礼包#论文#Vision-basedGNSS-FreeLocalizationforUAVsintheWild论文地址:https://arxiv.org/abs/2210.09727作者单位:芬兰研究院开源代码:https://...
针对移动机器人激光导航定位取卸货过程,发生的货物位置偏差大而导致的取卸货不成功的情况,本文给出了一种解决方法,即视觉辅助运用模板匹配,提取感兴趣区域,边缘检测提取轮廓找中心点来检测货物托盘所在的位置,...
机器视觉相机夹具(你想要怎么摆放产品都可以滴,无需治具的智能视觉点胶机。)
...统软件,进一步提升了点胶的精准度。点胶机市场出现的机器,普遍存在精度不高,打胶不够稳定现象,一部分原因是系统的问题,一部分是点胶头的出胶精度控制问题,那我们公司针对这两方面的问题着手研讨。发现市场上的...