机器人视觉跟踪(哈工大开源RGB-D-惯性里程计,用于动态环境和资源受限机器人)
Posted
篇首语:获取生活中最丰硕果实和最大享受的秘密在于,冒险犯难地生活!本文由小常识网(cha138.com)小编为大家整理,主要介绍了机器人视觉跟踪(哈工大开源RGB-D-惯性里程计,用于动态环境和资源受限机器人)相关的知识,希望对你有一定的参考价值。
机器人视觉跟踪(哈工大开源RGB-D-惯性里程计,用于动态环境和资源受限机器人)
以下内容来自小六的机器人SLAM学习圈知识星球每日更新内容如何高效学习机器人SLAM?
点击领取学习资料 → 机器人SLAM学习资料大礼包
#论文##开源代码# RGB-D Inertial Odometry for a Resource-restricted Robot in Dynamic Environments
论文地址:IROS2022论文集
作者单位:哈尔滨工业大学
开源代码:https://github.com/HITSZ-NRSL/Dynamic-VINS
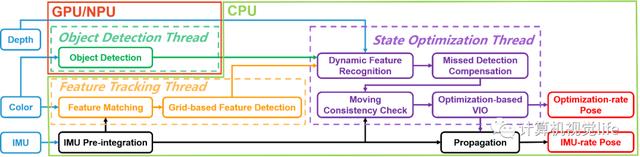
当前的同时定位和映射(SLAM)算法在静态环境中表现良好,但在动态环境中很容易失败。最近的工作将基于深度学习的语义信息引入SLAM系统,以减少动态对象的影响。然而,在资源受限的机器人的动态环境中应用鲁棒定位仍然具有挑战性。本文提出了一种用于动态环境中资源受限机器人的实时RGB-D惯性里程计——Dynamic-VINS。三个主要线程并行运行:对象检测、特征跟踪和状态优化。
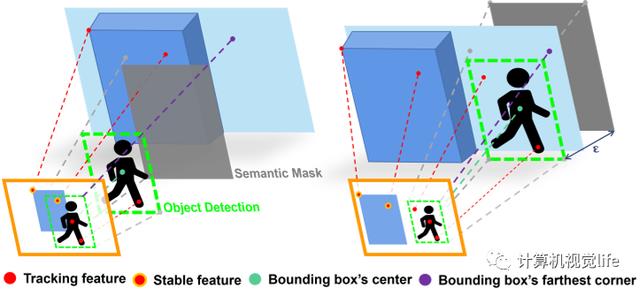
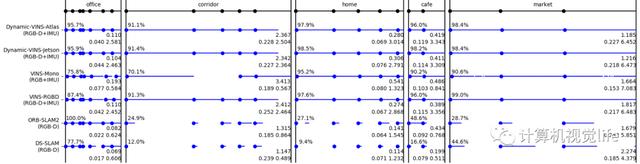
所提出的动态VINS将对象检测和深度信息结合用于动态特征识别,并实现了与语义分割相当的性能。动态VINS采用基于网格的特征检测,并提出了一种快速高效的方法来提取高质量的fast特征点。IMU用于预测运动,以进行特征跟踪和运动一致性检查。所提出的方法在公共数据集和现实世界应用上进行了评估,并在动态环境中显示出具有竞争力的定位精度和鲁棒性。然而,据我们所知,这是目前在动态环境中用于资源受限平台的最佳性能实时RGB-D惯性里程计。
本文贡献如下:
1、提出了一种基于RGB-D惯性里程计的高效优化方法,以在动态和复杂环境中为资源受限的机器人提供实时状态估计结果。
2、 提出了轻量级的特征检测和跟踪来减轻计算负担。此外,提出了结合对象检测和深度信息的动态特征识别模块,以在复杂和室外环境中提供鲁棒的动态特征辨识。
3、 进行了验证实验,以显示所提出的系统在动态环境中的资源受限平台上的竞争准确性、鲁棒性和效率。



以上内容来自小六的机器人SLAM学习圈 每日更新内容如何高效学习机器人SLAM?
相关参考
江苏鼎智矿山工程有限公司(【开源北交所上市跟踪】2022年北交所83家公司成功上市(202311))
近期(2022.12.24~2022.12.30),北证A股整体PE估值有一定程度下降,由16.81X下降到16.68X;科创板和创业板两个板块整体PE估值有一定程度回升,其中科创板整体PE估值由34.85X回升到36.24X,创业板整体PE估值由34.42X回升到35.16X。2022年1月1...
...国产的桌面贴片机用起来都不咋地,而且价格也不菲,带视觉的将近2W。思来想去选择了OpenPnP,一方面价格便宜,另一方面开源的,有问题还可以自己研究一下。1.简介OpenPnP是一个开源桌面贴片机,有兴趣的朋友可以自己DIY一套...
有关机器人技术的论文(美团无人机论文获ICRA年度最佳论文奖,可降低机器人运行功耗)
由机器人和自动化学会举办的机器人领域的国际顶级会议ICRA2022(国际机器人与自动化学术会议,InternationalConferenceonRoboticsandAutomation)于5月23-27日举办。来自美团无人机团队的视觉里程计相关论文获得ICRA2022导航领域的年度最佳...
激光3D轮廓传感器(深入了解3D激光三角测量(1)——激光成像系统的配置方法)
...各个领域中的产品尺寸检测、焊缝跟踪、工件轮廓测量、机器人轨迹引导等诸多使用场景当中。虽然使用三角测量的基本概念很简单,但在设计此类系统时仍需要解决诸多
激光3D轮廓传感器(深入了解3D激光三角测量(1)——激光成像系统的配置方法)
...各个领域中的产品尺寸检测、焊缝跟踪、工件轮廓测量、机器人轨迹引导等诸多使用场景当中。虽然使用三角测量的基本概念很简单,但在设计此类系统时仍需要解决诸多
1.Cognex美国康耐视(Cognex)公司成立于1981年,是机器视觉系统、视觉软件、视觉传感器和表面检测系统的全球领先供应商,也是领先的工业ID读码器供应商。近年来,康耐视大力发展基于深度学习的机器视觉产品,2018年推出具有...
注射模块(小巧精悍燕大、哈工大研发基于压电粘滑驱动的微型管道机器人)
...等因素的限制,为了进行检测或执行操作任务,需要管道机器人具有小巧的体积,大负载能力,高精度定位以及可靠的控制。针对这一要求,燕山大学和哈尔滨工业大学团队在《FrontiersofMec
注射模块(小巧精悍燕大、哈工大研发基于压电粘滑驱动的微型管道机器人)
...等因素的限制,为了进行检测或执行操作任务,需要管道机器人具有小巧的体积,大负载能力,高精度定位以及可靠的控制。针对这一要求,燕山大学和哈尔滨工业大学团队在《FrontiersofMec
...降低成本和浪费,汽车零件视觉检测系统数据采集,包括机器人引导、零件可追溯性、测量关键尺寸、定位焊接螺母、弹簧和紧固件的存在、密封剂的焊道跟踪
文档管理系统(开始使用 LogicalDOC 吧,一个开源文档管理系统)
使用LogicalDOC更好地跟踪文档版本,这是我们开源工具系列中的第12个工具,它将使你在2019年更高效。--KevinSonney每年年初似乎都有疯狂的冲动想提高工作效率。新年的决心,渴望开启新的一年,当然,“抛弃旧的,拥抱新的”的...