机器人的运动控制原理(浅析机器人(正 )运动学D-H变换原理及算法)
Posted
篇首语:愿你纵踩淤泥,也要心向光明。本文由小常识网(cha138.com)小编为大家整理,主要介绍了机器人的运动控制原理(浅析机器人(正 )运动学D-H变换原理及算法)相关的知识,希望对你有一定的参考价值。
机器人的运动控制原理(浅析机器人(正 )运动学D-H变换原理及算法)
经常给客户培训,期间会有善于思考的朋友们提出一些很有价值的问题!比如,有人会问,机器人是怎么运动的?这种问题往往让我不知从何下手!多数情况下我都是讲一下机器人的各种坐标系用法,大家也都把这些坐标系的用法当成机器人最基础的知识来使用了!买来的机器人简单应用这也足够用了!对于复杂的非标应用,就很难搞定了,有些复杂功能,你得了解机器人最底层的逻辑,才能写出客户想要的功能!例如和多个外部轴同步运动共用坐标系;例如开发自动校准机器人零点的非标功能;或者你们自己设计一个三轴或更多轴的运动平台,需要坐标系的运用;等等!
今天我用最简单的语言给大家浅析下机器人最底层的算法,运动学正解;意在让大家了解其原理,懂其原理,大家遇到问题可以有个思路,思路对了,具体的程序就容易了!
什么是运动学正解?
本文都用如下图六轴机械手举例!有实体图和简化成只有六个电机的连杆结构,主要用连杆电机图做计算逻辑的解析!
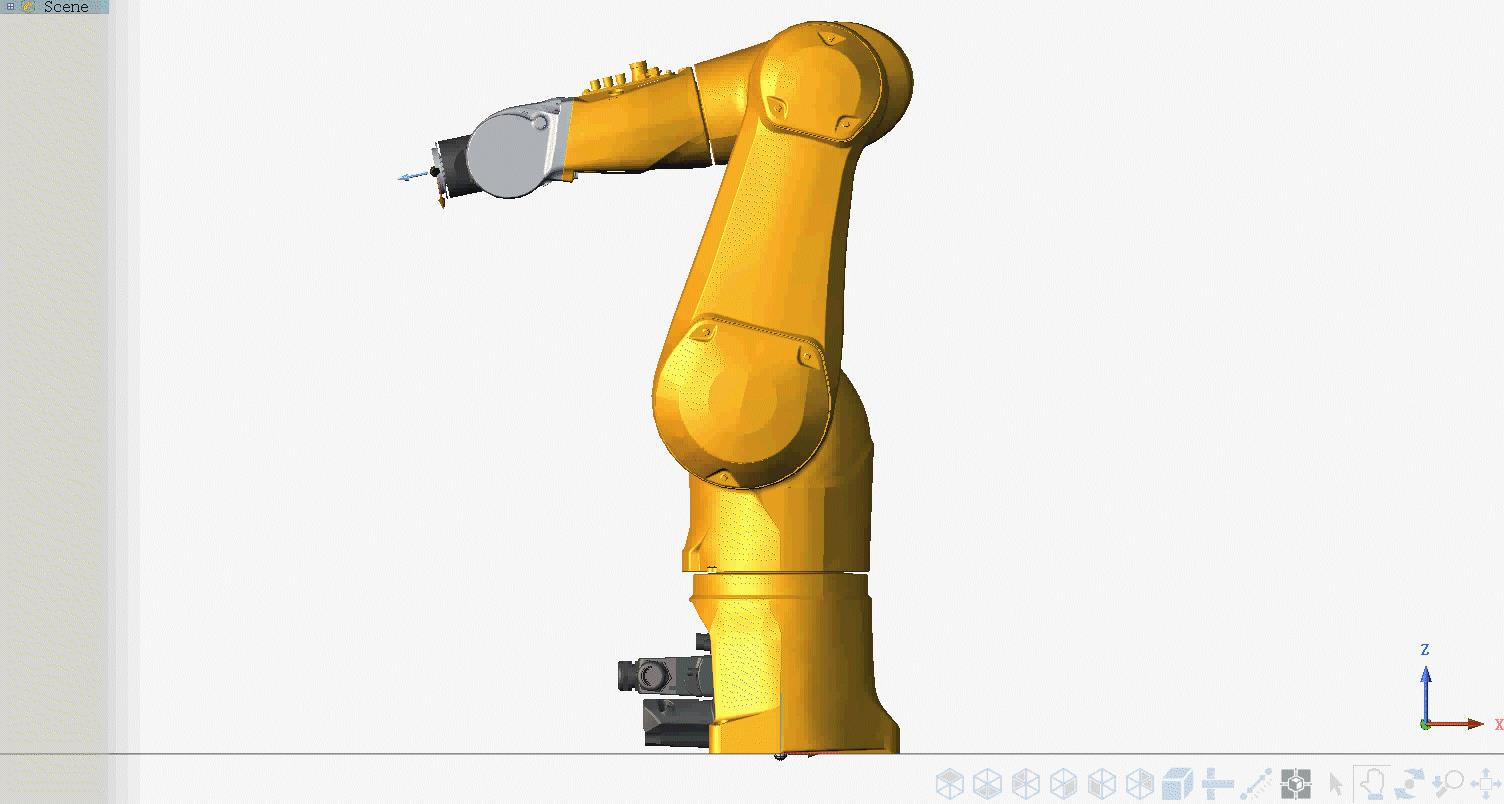
机器人实体图
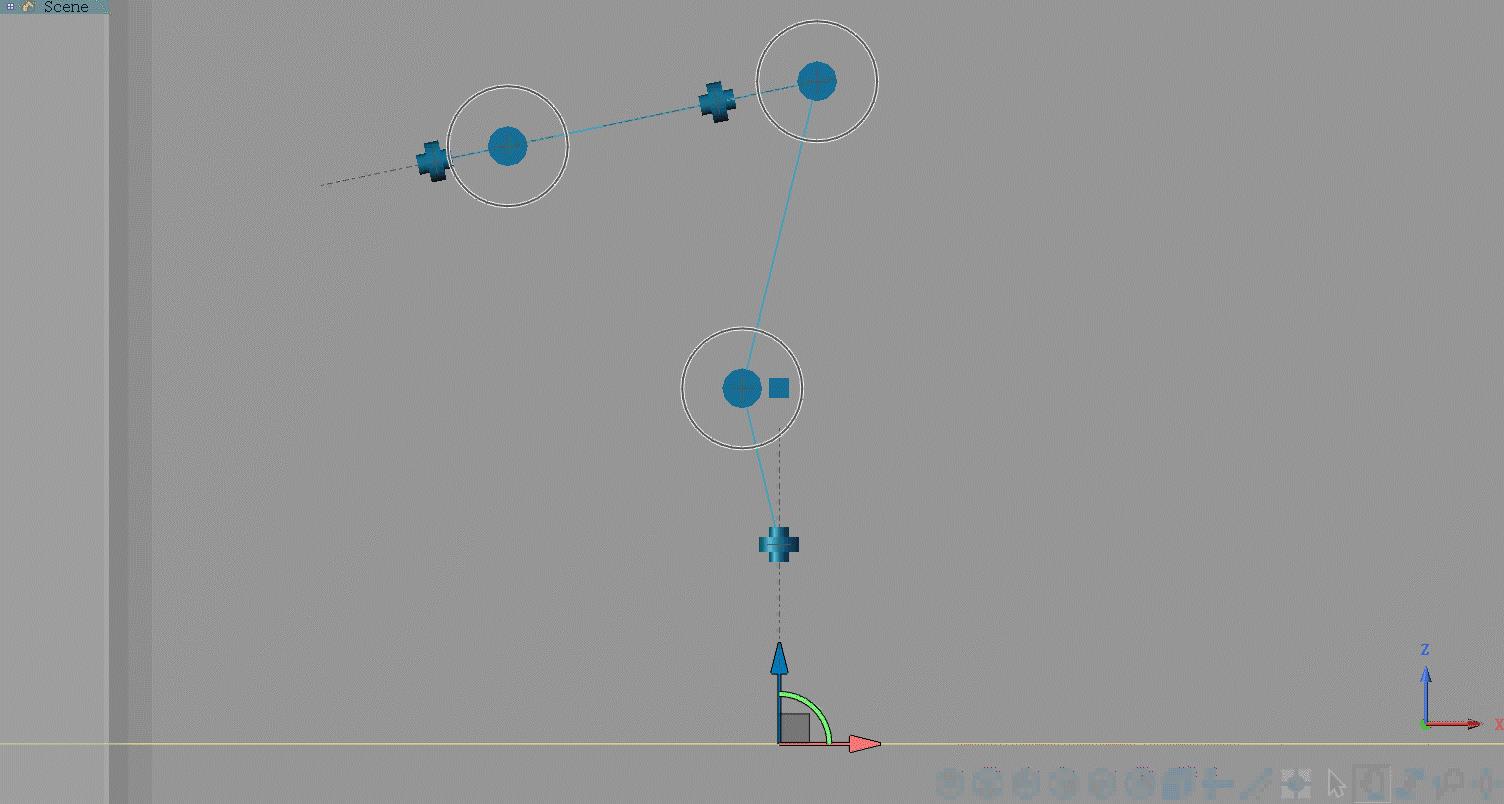
机器人电机轴位置图
什么是运动学(正)解;
机器人得有坐标数据,大家才能知道机器人现在在哪里,然后写出它去哪里的程序!
机器人的坐标怎么理解呢?比如六轴焊接机器人,我使用它就是为了焊接,我只需要它的焊枪头的位置数据!焊枪头在哪里,就可以说机器人在哪里!
那么机器人焊枪头的坐标数据是怎么来的呢?说到坐标,就得有一个原点或者基准,这个原点和基准是不会变化的!这个基准就是在机器人的底座上,永远不会变化;正运动学就是求这个焊枪头在基准坐标里的位置;

焊接机器人
怎么求焊枪头位置数据(TCP)呢?
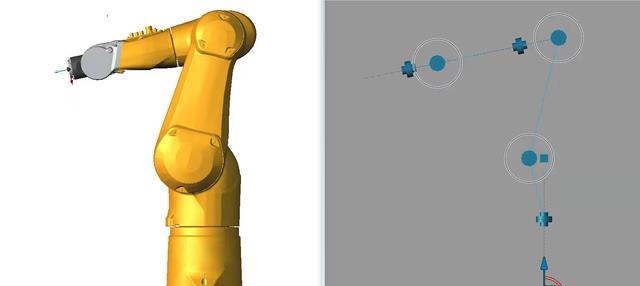
以下面两幅图为例讲解,分别是机器人正视图和其连杆机构,机器人右视图和其连杆机构!
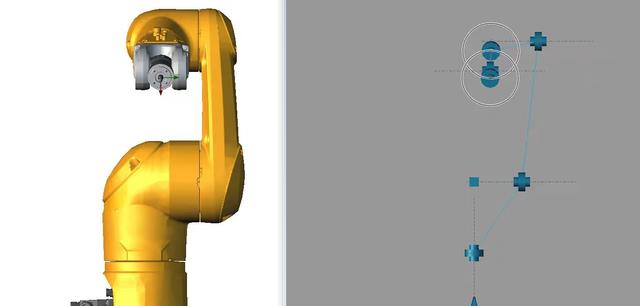
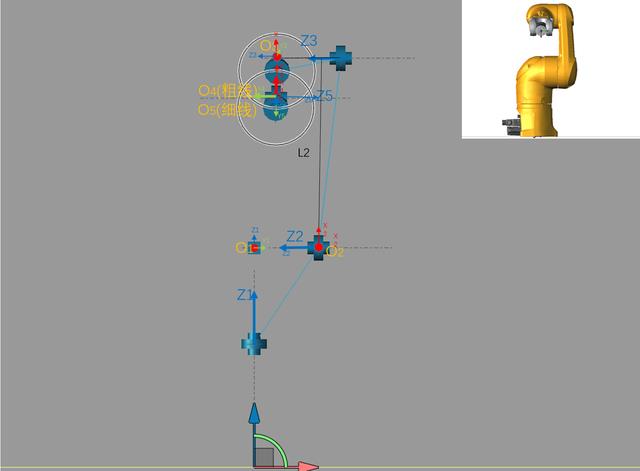
机器人正视图和其连杆机构
机器人右视图和其连杆机构
假定机器人这个姿势六个电机都在零点,如下两图所示,首先我们要给连杆简图建立坐标系,坐标系怎么建立呢?分六步完成:
第一步:找电机轴,标出轴线,如图Z1-Z6为轴线,对应六个关节轴,正视图和右视图配合看着比较清晰;
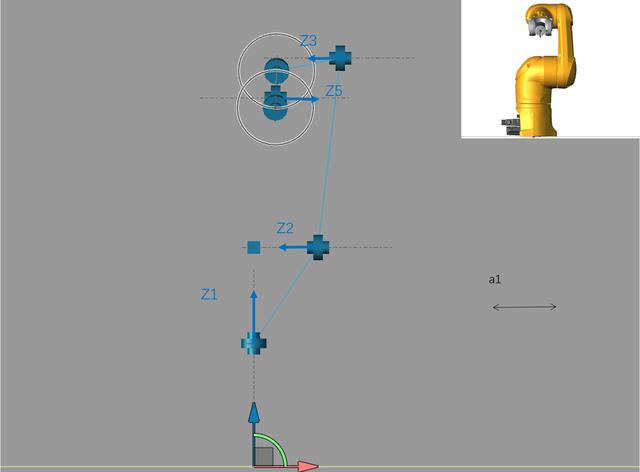
正视图轴线
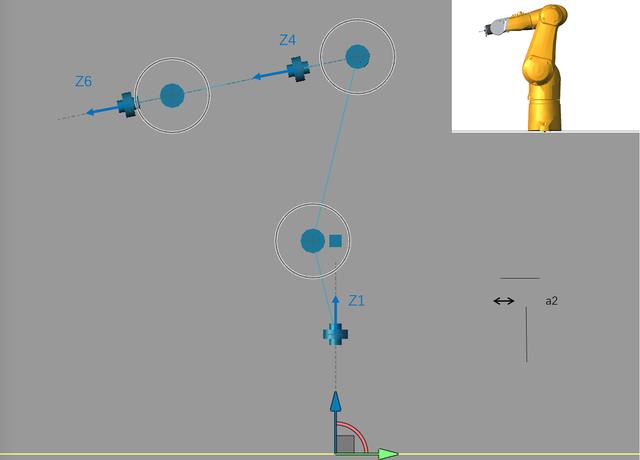
右视图轴线
第二步:找出关节轴i和i+1之间的公垂线(就是和两条相邻的轴线都垂直的线),如果两条轴线相交则没有公垂线,那么就取其交点;以公垂线与关节轴i的交点或相交轴线的交点为坐标系i的原点(例如Z1和Z2的公垂线为L1,L1与Z1的交点就是坐标原点O1);如下图红点和红圈都是坐标系原点:
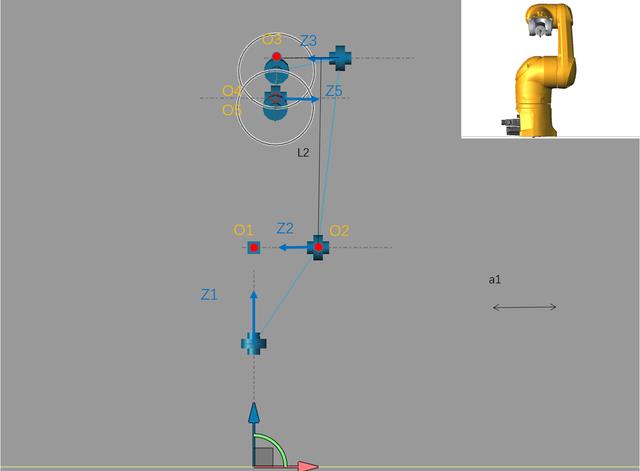
坐标系原点正视图
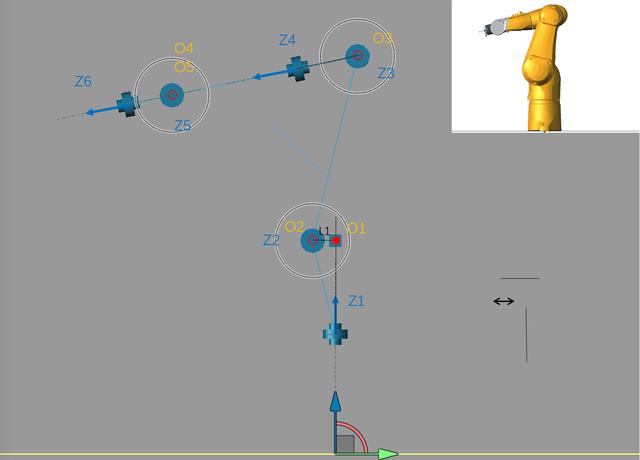
坐标系原点右视图
第三步:确定Z轴(图中已经标出),和轴线是同一条线;(没有规定Z轴方向,所以可以有两个方向,我们就使用图示的方向,所以每家机器人规定的方向可能会不同!)
第四步:规定X轴沿着公垂线的指向,或者轴线相交的情况下规定X垂直于相交直线的平面;(垂直于相交平面的直线又有两个方向,我们只用图示的方向,所以每家机器人的X方向也可能有所不同!)如下图,红色箭头代表X轴:
确定X轴,正视图
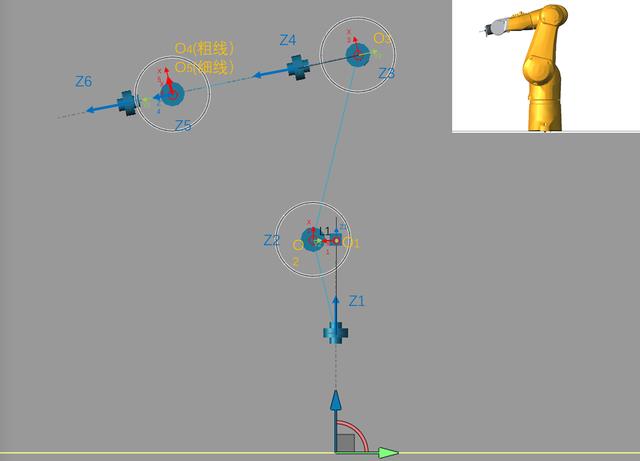
确定X轴,右视图
第五步:右手定则确定Y轴方向;如上图,绿色箭头为Y轴方向;
第六步:尽量使基坐标O0和坐标系O1重合,图中就是重合状态,也有的机器人基坐标在O1下方或者角度有偏移,都无所谓,就是参数有点变化,下面讲到参数!
坐标系定义好了,要转换坐标系了(例如坐标系O1转换到 坐标系O2),正常情况下,把一个坐标系转换到另一个坐标系需要6个参数,(X/Y/Z/A/B/C),三个坐标值和三个坐标旋转数据,每个电机定义好坐标系用这六个参数一样可以完成坐标系转换;但是国外有两个真专家(Denavit-Hartenberg),研究出来用四个参数就可以求解的方法,后人就一直用他们的方法简化运算,我也就讲他们的方法D-H变换了,上面规定设定坐标系的步奏也是为了找到这四个参数。
既然是规定好的,我们就按照规定来,规定参数为⍺、a、d、θ;
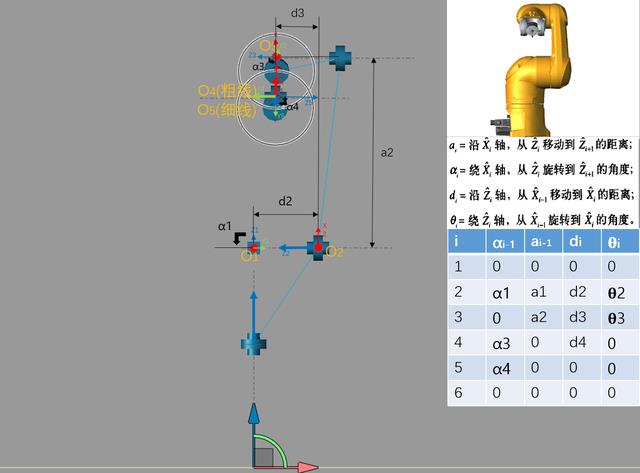
ai=沿Xi轴,从Zi移动到Zi+1的距离;
⍺i=绕Xi轴,从Zi旋转到Zi+1的角度;
di=沿Zi轴,从Xi-1移动到Xi的距离;
θi=绕Zi轴,从Xi-1旋转到Xi的角度;
i代表坐标系,如下图右下角列出的DH变换表格,对应的数据在图中更可以找到,有兴趣的朋友可以自己推理下!例如坐标系O1需要ai-1,⍺i-1,di,θi这四个参数,因为定义基坐标系O0和坐标系O1重合,所以四个参数都是0,如果设定基座标O0和坐标O1有Z轴旋转角度90度,那么⍺0=90;其实d、a和⍺参数就是电机机械安装位置的相对数据, θ是对于电机旋转角度,只有这一个是变量!
DH参数 正视图
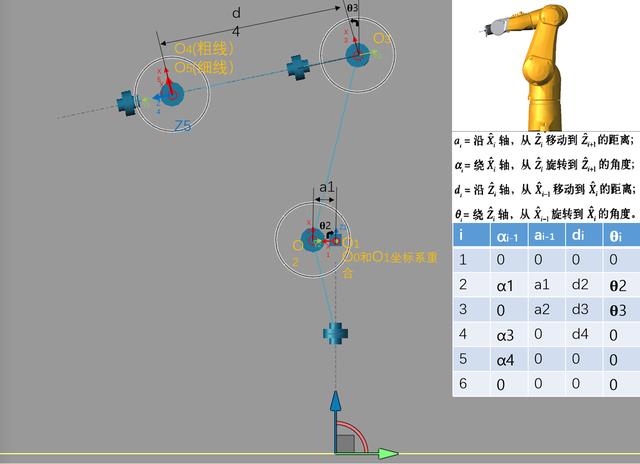
DH参数 右视图
怎么用设定的坐标系和四个参数算出TCP呢?
上图中只建立坐标系到O5,后面可以在加一个坐标系O6,这个O6就是TCP了,图中O6和O5我设定为重合,所以表格中第六行的四个参数都为0,有的机器人机械结构会把O6沿着六轴往外移动一点,这个改d参数就可以了。
下面这个变换矩阵,就是计算从坐标系Oi-1变换到坐标系Oi的运算。c代表cos,s代表sin三角函数,参数带入公式计算也很简单吧!
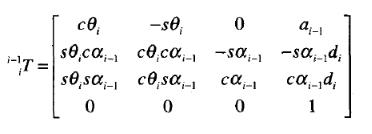
变换矩阵
例如从坐标系O0变换到O1,再变换到O2,再变换到O3,如下图计算;最终得出的坐标是O3的坐标;同理想得出O6(TCP)的坐标,则再从O3变换到O4,O4变换到O5,O5变换到O6!六个矩阵相乘,得到TCP相对于基座标O0的变换矩阵,基坐标系O0乘以这个变换矩阵(6矩阵相乘结果),得出TCP坐标值!
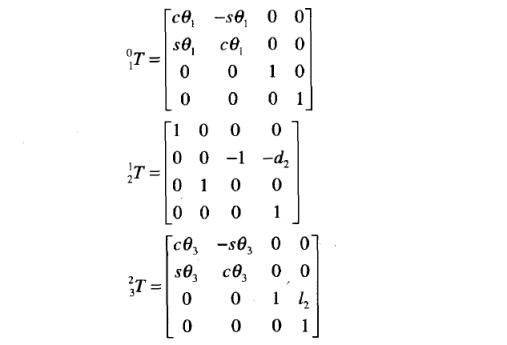
变换到O3的三个矩阵
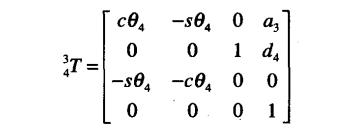
O3-O4
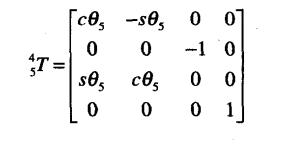
O4-O5
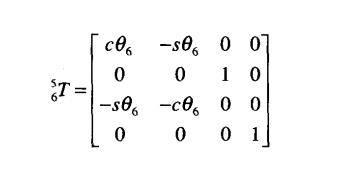
O5-O6
到此就结束了,D-H变换的原理大概讲完了,这就是机器人运动学正解,可以移动各个关节,但是TCP是相对6轴不动的!如果配合机器人运动学逆解,你可以自己搭建一个简易机器人玩了!不知道各位朋友是否耐心看完了?
下一次讲讲逆解,逆解复杂很多了!
喜欢和感觉有用的朋友们,多关注支持我!我会持续给大家分享一些实用的经验!
相关参考
一、认识示教器TP(TeachPendant)1、TP的作用(1)点动机器人(2)编写机器人程序(3)试运行程序(4)生产运行(5)查阅机器人的状态(I/O设置,位置,焊接电流)2、认识TP上的键(如下图)(1)StatusInicators(状态指示灯):指...
机器人运动学(机器人运动控制之学习方法:模仿学习和强化学习)
“机器人”一词首次出现于1920年捷克作家卡雷尔·恰佩克(KarelCapek)创作的科幻剧本《万能机器人》中。随着科技的进步,机器人已经逐渐走进人们的真实生活,各种不同功能的机器人被先后创造出来。自主运动作为机器人区...
机械手控制系统原理图(机械手的关节,靠什么连接的?为什么可以实现精准运动?附3d模型)
...BB的机械手大都用他们自己制造的齿轮机构减速。6轴工业机器人的1、2、3轴用的都是RV减速机,属于摆线针轮结构。4、5、6轴一般采用谐波减速机。由于轴承是特制的,这种摆线针轮的RV减速机轴向尺寸很
机器人驱动维修(机器人行业专题报告:运动控制,机器人供应链关键环节)
...,肖群稀,关东奇来,时彧,黄菁伦)运动控制成为人形机器人供应链的主要领域机器人产业链框架人形机器人产业链涉及的四大环节:感知、交互、运控、导航。自动化装置包括:1)传感器:本体感受传感器、触觉+视觉+声音...
数控机床常用的三种伺服电机(机器人行业专题报告:运动控制,机器人供应链关键环节)
...,肖群稀,关东奇来,时彧,黄菁伦)运动控制成为人形机器人供应链的主要领域机器人产业链框架人形机器人产业链涉及的四大环节:感知、交互、运控、导航。自动化装置包括:1)传感器:本体感受传感器、触觉+视觉+声音...
施耐德伺服运动控制产品(施耐德电气发布全新运动控制解决方案,助力机器制造更“智能”)
...BCH2伺服电机,与ModiconM262控制器一起组成全新的高性价比运动控制解决方案,以满足包装、印刷、材料加工,电子电工,锂电等不同行业客户对伺服系统高性能、高精度、高速度的要求。全新SercosIII实时总线伺服,引领未来新增...
...公司业务覆盖了从自动化核心部件及运动控制系统、工业机器人到机器人集成应用的智能制造系统的全产业链,构建了从技术、质量、成本、服务和品牌的全方位竞争优势。公司业务主要分为两个核心业务模块:一是自动化核心...
...公司业务覆盖了从自动化核心部件及运动控制系统、工业机器人到机器人集成应用的智能制造系统的全产业链,构建了从技术、质量、成本、服务和品牌的全方位竞争优势。公司业务主要分为两个核心业务模块:一是自动化核心...
运动控制在实际的工业现场中随处可见,也常听到大家提到运动控制;哪什么叫运动控制?以及基本概念有哪些?下面我们为大家做简单的介绍:运动控制(MC)是自动化的一个分支,它使用通称为伺服机构的一些设备如液压泵,...
控制一体机(「机器视觉运动控制一体机小课堂」三分钟进行灰度匹配)
背景不同的模板匹配方法,其操作步骤也不一样,其生成模板的方式也有不同的地方,在之前的课程中我们讲述了基于形状的模板匹配,本期课程我们去了解一下基于灰度值的模板匹配。基于灰度值的模板匹配适用于图像内灰度...