机器人控制系统的(详解工业机器人控制系统架构)
Posted
篇首语:大鹏一日同风起,扶摇直上九万里。本文由小常识网(cha138.com)小编为大家整理,主要介绍了机器人控制系统的(详解工业机器人控制系统架构)相关的知识,希望对你有一定的参考价值。
机器人控制系统的(详解工业机器人控制系统架构)

前言
本文比较了机械臂和移动机器人两种工业机器人的控制系统方案,对其特点进行了介绍。
本文比较了机械臂和移动机器人两种工业机器人的控制系统方案,对其特点进行了介绍。

以上分类是根据应用对象,此外,市面上更多的是通用型运动控制器,即控制非标设备的。
1 控制器底层方案
1.1 机械臂类
机械臂类的控制器发展较早,相对成熟,先来看看现有的控制系统底层方案。

1.2 移动机器人类
移动机器人的控制器属于较新的方向,工业移动机器人有AGV、无人驾驶工程机械等形式,控制系统底层方案如下:

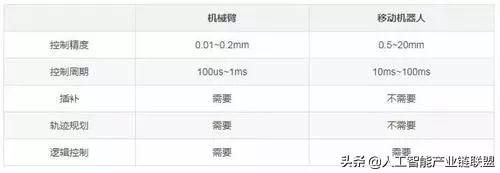
1.3 对比
机械臂对精度和运动稳定性的要求较高,因此计算量大、周期短,比移动机器人一般要高1到2个量级。移动机器人一般对同步精度要求不高,其配置相对较低。
机械臂一般工作于固定的区域,其控制器通常放置于机箱内,因此防护等级不高,一般是IP20。
移动机器人由于需要经常运动,尤其是室外工程机械,要考虑防水防尘,其防护等级较高,一般是IP67。
2 CoDeSys介绍
2.1 CoDeSys的组成
你会发现,很多的机器人控制软件都是借助CoDeSys实现的,那么什么是CoDeSys呢?
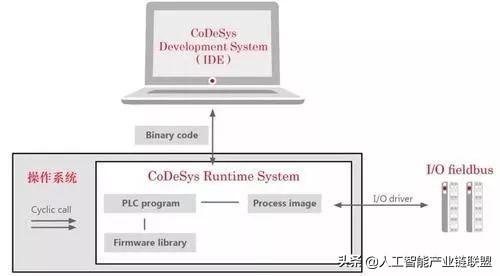
CoDeSys是一款付费的软PLC开发软件,简单来说,它包括两部分:Development System和Runtime System。Development System就是用来编程的软件界面(就像Visual Studio、Eclipse等软件,也可以称为IDE),设计、调试、编译PLC程序都在IDE中进行,这部分是用户经常打交道的;
PLC程序写好了以后,就要把它转移到硬件设备中运行。可是这时生成的PLC程序自己是无法运行的,它还要在一定的软件环境中才能工作,这个环境就是Runtime System,这部分是用户看不到的。
二者安装的位置通常不同,IDE一般安装在开发电脑上,Runtime System则位于起控制作用的硬件设备上,二者一般使用网线连接,程序通过网线下载到Runtime中运行。
CoDeSys在国内知名度不高,但是在欧洲久负盛名,尤其在工业控制领域。我们上面提到的很多机器人公司都使用了它的产品,例如KEBA、倍福、固高,还有几乎所有的移动机器人控制器厂家。
设计CoDeSys的3S公司只卖软件,不卖硬件。硬件电路需要由用户自己设计,3S公司负责将Runtime System移植到客户的硬件上。Runtime System可以裸跑在硬件上,但一般是运行在操作系统上,配置操作系统也是客户的工作。
如果客户要求,CoDeSys的IDE可以定制,换成客户的logo和外观,这就是为什么你会发现不同厂家的开发平台长得不一样,但风格又比较相似。
当然,用户也可以使用其它IDE,例如倍福就使用了微软的Visual Studio,而背后的编译器等内核以及函数库仍然采用CoDeSys的方案。
CoDeSys的Runtime具有强大的适应性,支持绝大多数的操作系统和硬件芯片架构。
2.2 CoDeSys Runtime原理
CoDeSys的IDE部分是免费的,你可以从其官网下载体验体验。真正收费的是运行系统Runtime System。

CoDeSys在设计之初就将功能划分为若干组件模块,例如总线协议栈、可视化界面、运动控制、安全控制等等,用户可以像搭积木一样选购必需的模块搭建自己的系统,最后形成一个定制化的控制软件平台。
一些初次接触软PLC的用户可能对这部分感到陌生,但其实这种设计方式非常普遍。举几个例子,MATLAB Simulink的实时工具箱(Real-Time)就是这样的工作方式,用户在Simulink的图形界面里通过拖拽设计控制程序,然后下载到真实的硬件中跑,可以在这里了解。
还有像倍福也是这样的使用方式,用户在TwinCAT IDE里进行编程,然后下载到倍福的控制器中,控制器里面其实已经预装了一个Runtime。西门子的STEP7也是一款IDE,它的PLC中也存在一个配套的Runtime。
用户编写的PLC程序就像我们电脑里的应用程序,它运行在Runtime System上,而Runtime System又运行在操作系统之上。
Runtime System位于应用程序和操作系统之间。所以可以被称为中间件(Middleware)。在机器人软件里面,处于同样地位的还有ROS、OROCOS(Real-Time Toolkit)等等。
机器人的控制,像数控机床一样,对实时性有要求,因此我们选择的操作系统最好是实时操作系统(RTOS)。遗憾的是,我们经常用的操作系统都不是实时的,例如Windows和Linux。但幸运的是,有人对它们进行了改造,也就是加入实时补丁。
常用的实时操作系统有:VxWorks、QNX、Windows RTX、Xenomai、RT Linux、Linux RTAI、WinCE、μC/OS、SylixOs等等。考虑到Windows和Linux这两款操作系统的用户较多,CoDeSys推出了相应的实时补丁(RTE),为用户免去了改造的烦恼。
2.3 CoDeSys的缺点
CoDeSys给我们开发控制器带来了便利,省去了从零开始的麻烦,但是依靠CoDeSys这类商业软件开发自己的控制器产品也存在不少的缺点:
1) 底层算法不公开
CoDeSys集成的运动控制组件、总线协议栈都是封装好的,用户无法了解其内部细节,也无法针对自己的具体需求进行定制优化,只能简单地调用。用户只能依附于CoDeSys平台,难以形成自己的核心技术。
2)功能有限,难以扩展
现在以机器视觉、人工智能、自动驾驶等为代表的新技术突飞猛进,而工业控制上的很多技术仍然停留在20年前。以移动机器人中的导航场景为例,基于视觉或者激光的导航方法需要采集大量的数据并对其进行处理,其中涉及相当多的矩阵计算。
而现在PLC只能进行落后的一维数字计算,难以实现复杂的算法。与人工智能圈子喜欢开源的风格正好相反,工业控制圈子相互封闭,谁都不肯开放自家的函数库,开源函数库极少(OSCAT),就连最基本的滤波算法、矩阵计算都要自己从头开始写。而且,国际标准提供的基本函数太过有限,完全无法适应新的场景,急需扩展。
3) 难以更新
由于完全依赖CoDeSys,客户自己产品硬件的升级换代需要重新定制移植,导致成本增加。
3 开源方案
目前存在一些开源的控制系统方案,例如Beremiz、Orocos、OpenPLC、OpenRTM、ORCA。
开发机器人控制器是个繁重的工作,要明确一系列性能要求,首先是实时性。
实时性对于工业机器人来说一般是必须的,对于服务或娱乐机器人则未必。一般人很容易错把“实时性”理解为处理或者响应速度快,但是其实“实时性”表示时间上的“确定性”,例如实时操作系统(RTOS)中的中断响应或者进程切换的延迟时间一定是在一个时间范围内。
我们常用的操作系统(Windows、Linux)都不是实时操作系统,因为它们设计的初衷是吞吐量,不能保证每个事件都在一定范围内得到处理。再比如,标准以太网的传输速度比实时工业以太网快多了,但是它也却不是实时的,因为它同样不能保证数据在给定的时间内完成传输。
理解实时性不太难,可是机器人哪些的任务需要实时运行呢?如何根据机器人的性能要求确定程序运行的时间间隔呢(是1ms还是10ms)?实时性取决于硬件还是软件呢?
如何根据实时性选择具体的软硬件呢(该选择ARM还是X86、Linux RTAI还是VxWorks)?网上缺少这方面的深入讨论,各大机器人厂家也不会公开自己的测试和试验结果,似乎这方面主要依靠经验和试错。
这里也只能提供几个指标,目前工业机械臂的控制周期是1ms左右,性能较高的伺服驱动器位置环的控制周期可以达到125[Math Processing Error] mu sμs。
PLCopen定义了伺服和运动控制的一些标准,包括编程语言、运动控制基础函数块(Function Block)、输入输出接口的参数等[Math Processing Error] ^[3]
[3]具体的实现代码细节,这个是由各个厂家提供的。
相关阅读
【工业机器人】全球工业机器人详细产业链梳理!
【工业机器人】日本工业机器人大盘点
【智能工厂】智能工厂如何快速落地
【工业技术】航空制造推动新概念机器人发展(上)
【工业技术】航空制造推动新概念机器人发展(下)
一文读懂人脸识别技术
【神经网络】给初学者们讲解人工神经网络(ANN)
人工智能的基础--知识分类
人工智能产业链深度透析—基础层
人工智能产业链深度透析-技术层
人工智能全产业链深度透析--(综合)
人工智能产业链深度透析—产业应用医疗篇
朱松纯 | 人工智能的现状、任务、构架与统一(上)
朱松纯 | 人工智能的现状、任务、构架与统一(中)
朱松纯 | 人工智能的现状、任务、构架与统一(下)
【智慧农业】2018中国农牧家禽行业智慧养殖白皮书
【智慧农业】2019年智慧农业市场调研及前景研究报告(附PDF下载)
【智能家居】我国智能锁产业现状及未来发展趋势分析
【知识图谱】详解知识图谱关键技术与应用、AI图谱技术在知乎的应用实践、如何构建多快好省的“知识图谱即服务”
荐:
【中国风动漫】除了《哪吒》,这些良心国产动画也应该被更多人知道!
声明
内容来源:公众号兔哥、工业机器人教学、网络,免责声明:部分文章和信息来源于互联网,不代表本订阅号赞同其观点和对其真实性负责。如转载内容涉及版权等问题,请立即与小编联系,我们将迅速采取适当的措施。本订阅号原创内容,转载需授权,并注明作者和出处。如需投稿请与小助理联系
编辑:Zero


重大
消息
!
招募志愿者:
长期招募志愿者,参与文章创作、微信群维护、文章排版等工作,有助于拓展个人影响力,请留言与我们联系。
点击
“阅读原文“
立即加入联盟!
留下信息,工作人员联系你哦~

文末福利
1.赠送800G人工智能资源。
获取方式:关注,回复“人工智能”。
2.「超级公开课NVIDIA专场」免费下载
获取方式:关注,回复“公开课”。
3.免费微信交流群:
人工智能知识分享群、
智能机器人交流论坛、
人工智能厂家交流群、
AI产业链服务交流群、
STEAM创客教育交流群、
人工智能技术论坛、
人工智能未来发展论坛、
AI企业家交流俱乐部
雄安企业家交流俱乐部
细分领域交流群:
【智能家居系统论坛】【智慧城市系统论坛】【智能医疗养老论坛】【自动驾驶产业论坛】【智慧金融交流论坛】【智慧农业交流论坛】【无人飞行器产业论坛】【人工智能大数据论坛】【人工智能※区块链论坛】【人工智能&物联网论坛】【青少年教育机器人论坛】【人工智能智能制造论坛】【AI/AR/VR/MR畅享畅聊】
入群方式:关注本公众号,回复“入群”
相关参考
运动控制在实际的工业现场中随处可见,也常听到大家提到运动控制;哪什么叫运动控制?以及基本概念有哪些?下面我们为大家做简单的介绍:运动控制(MC)是自动化的一个分支,它使用通称为伺服机构的一些设备如液压泵,...
物联网体系架构及各层次功能(一文详解物联网与大数据、云计算、工业物联网、区块链)
本篇文章就物联网、大数据以及云计算对三者之间的关系以及应用进行描述。工业物联网和区块链也进行了介绍。(一)物联网(1)什么是物联网物联网(InternetofThings,简称IoT)是指通过各种信息传感器、射频识别技术、全球...
物联网体系架构及各层次功能(一文详解物联网与大数据、云计算、工业物联网、区块链)
本篇文章就物联网、大数据以及云计算对三者之间的关系以及应用进行描述。工业物联网和区块链也进行了介绍。(一)物联网(1)什么是物联网物联网(InternetofThings,简称IoT)是指通过各种信息传感器、射频识别技术、全球...
1.空调机器设备安装施工1.1施工范围空调机器设备安装施工包括各项空调设备(本案无此设备时内容仅供参考),如:冰水主机(Chiller)、冷却水塔(CoolingTower)、水泵(WaterPump)、空调箱(AirHandlingUnit)及其它附属空调系统之机器设备。1.2...
1.1机器人系统运行轨道部署图1温室滑轨安装示意图Fig.1Installationdiagramofgreenhousesliderail1.2机器人系统结构图3机器人内部结构示意图Fig.3Internalstructureschematicdiagramofrobotsystem1.3机器人系统总体设计图4机器人系统整体架构Fig.4Overallarchit...
【一】移印的原理是把所需印刷的图案先用胶片蚀刻的方式制成钢板(或者铜、热塑型塑料)凹版,再利用硅橡胶材料制成的曲面移印头,将凹版上的油墨蘸到移印头的表面,然后往需要的对象表面压一下就能够印出文字、图案等...
【一】移印的原理是把所需印刷的图案先用胶片蚀刻的方式制成钢板(或者铜、热塑型塑料)凹版,再利用硅橡胶材料制成的曲面移印头,将凹版上的油墨蘸到移印头的表面,然后往需要的对象表面压一下就能够印出文字、图案等...
控制器是工业机器人的三大核心零部件之一,也是工业机器人的大脑,它的好坏直接决定了机器人性能的优劣,因此,不管是ABB、KUKA,还是新松、新时达等国内外各大工业机器人供应商都不约而同地把控制器的主导权掌握在自...
...将智能制造定义为“通过集成知识工程、制造软件系统和机器人控制来对制造技工们的技能和专家知识进行建模,以使智能机
一、工业机器人的主要组成部分1、机器人驱动装置概念:要使机器人运行起来,需给各个关节即每个运动自由度安置传动装置作用:提供机器人各部位、各关节动作的原动力。驱动系统:可以是液压传动、气动传动、电动传动,或...