机器人减速机是什么减速机(工业机器人用:滚珠转动驱动的减速机)
Posted
篇首语:没有任何动物比蚂蚁更勤奋,然而它却最沉默寡言。本文由小常识网(cha138.com)小编为大家整理,主要介绍了机器人减速机是什么减速机(工业机器人用:滚珠转动驱动的减速机)相关的知识,希望对你有一定的参考价值。
机器人减速机是什么减速机(工业机器人用:滚珠转动驱动的减速机)
简介

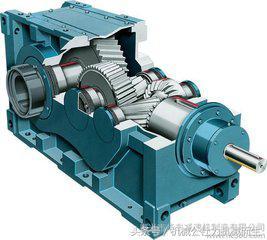
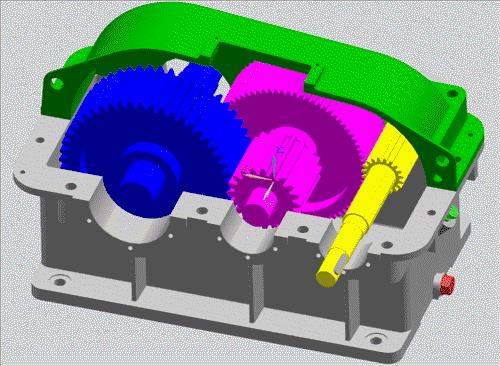
机械传动减速机大多数采用齿轮或蜗轮传动,其主要原理是利用改变齿轮齿数来实现变速。
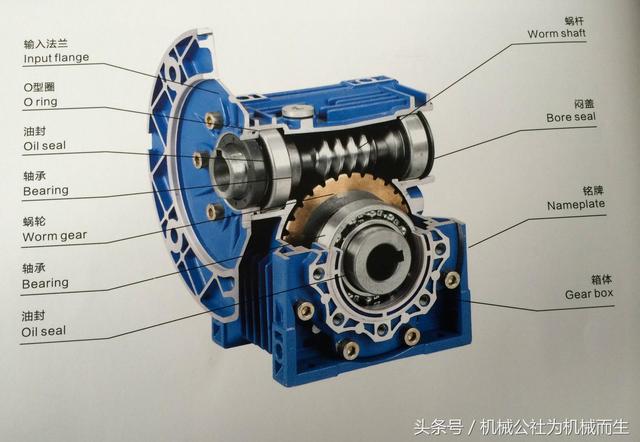

这类机械传动减速机所存在的缺陷与不足是:由于传动件加工精度不高,齿轮或蜗轮减速机在设计和安装过程中,均存在一定的工艺间隙而影响输出精度,加上齿与齿之间是以高副形式运动,容易产生机件磨损、传动不平稳、噪声大、输出精度差等问题。
用于多关节机器人的十字滑块驱动减速机,其机体内安装输入轴、十字滑块、轨迹控制器(即差动变速器 )和输出轴,请关注微 机械公社圈十字滑块上设有用于安装传动滚珠的传动轨迹,传动滚珠在传动轨迹内运动以将输入轴的运动传递给轨迹控制器;轨迹控制器下表面设有用于安装所述驱动滚珠的运动轨迹,轨迹控制器通过驱动滚珠调整输出轴的输出。这项技术不需要借助齿轮或蜗轮传动来实现变速,在一定程度上降低了减速机的噪音,提高了传动效率。但是,该驱动滚珠工作时易产生轻微跳动,其稳定性较差,容易产生减速机输出不平稳、步进震动、磨损率高等不良的现象。
滚珠转动驱动的减速机
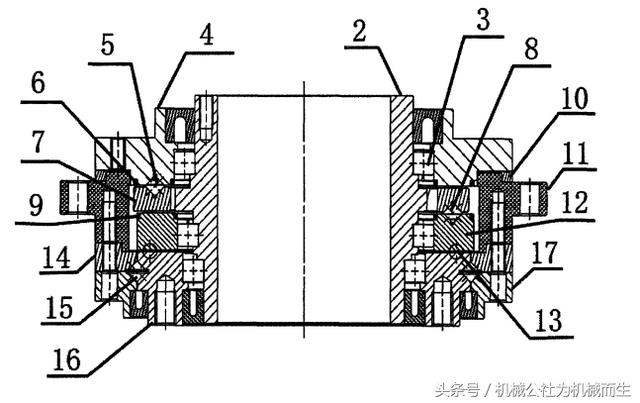
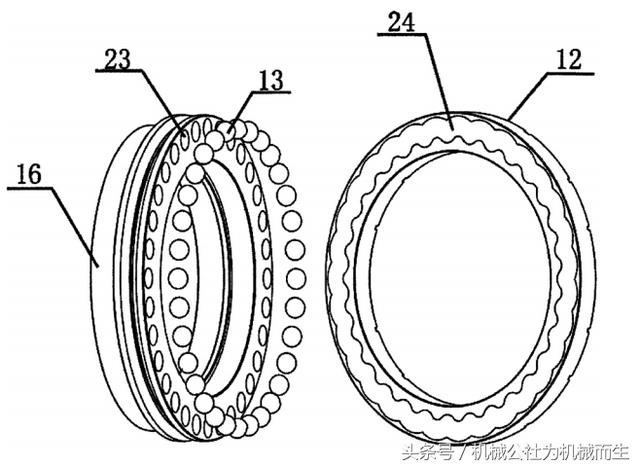
包括输入轴、输出轴、机体壳、后压板、差动变速器、轴承上盖、轴承下盖,在差动变速器与后压板之间装有随动板,该随动板的A面上设有A面V型轨道装有第一交叉滚柱、其B面上设有B面V型轨道装有第二交叉滚柱;后压板上设有用于安装第一交叉滚柱的传动轨迹,
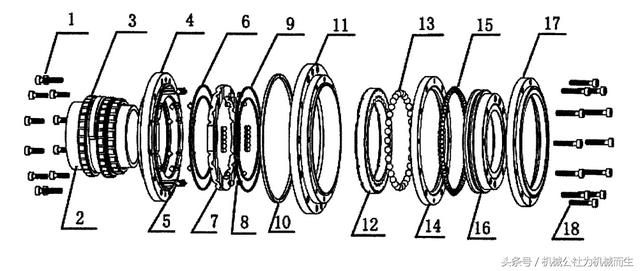
使第一交叉滚柱在该传动轨迹内运动而将输入轴的运动传递给差动变速器;差动变速器的表面上设有用于安装第二交叉滚柱的运动轨迹,差动变速器通过第二交叉滚柱调整输出轴的变速输出。
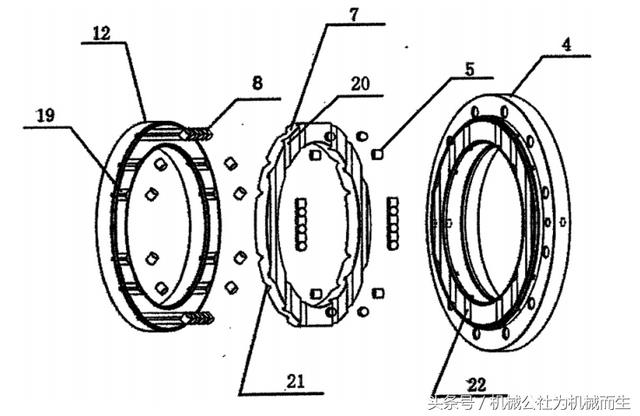
随动板的A面V型轨道与B面V型轨道在平面空间上形成十字交叉状,其交叉角度为87 .5度至92 .5度。在后压板与随动板之间装有第一固定环,在差动变速器与随动板之间装有第二固定环,分别对应用于限定第一交叉滚柱、第二交叉滚柱的运动而使其不会偏离轨迹。
优点
1、不采用齿轮做传动,使用输入轴(偏心轴)作为轨迹发生器,经过差动变速器由随动板、第一、第二交叉滚柱配合输入轴偏心运动完成输出来实现减速。具有结构紧凑、噪音低、重量轻、体积小、零间隙、传动平稳可靠、输出精度高等优点,传动比和传动效率高达93%以上。

2、通过随动板、第一、第二交叉滚柱、差动变速器实现自动调整输入轴(偏心轴)的运动与偏心量完全吻合,使减速机的传动滚珠和差动变速器的轨迹完全吻合,从而实现减速机输出平稳,机械磨损率低,消除了原减速机S形摆线槽或十字滑块的设计缺陷。特别适用于关节机器人的有关功能作业。

【机械公社】致力于提供机械的行业技术 ,更多行业技术请关注 机械公社圈

机械公社——为机械而生
相关参考
派克直流驱动器(工业机器人为什么用哈默纳科Harmonic Drive高精度精密减速机)
现今5轴6轴工业机器人的灵活度令人叹为观止,如此多的关机还能够做到运动和指令的精确传输,各部位紧密配合可靠地完成工序任务,在重复执行相同的动作时能保证工艺质量,工业机器人需要很高的定位精度和重复定位精度...
派克直流驱动器(工业机器人为什么用哈默纳科Harmonic Drive高精度精密减速机)
现今5轴6轴工业机器人的灵活度令人叹为观止,如此多的关机还能够做到运动和指令的精确传输,各部位紧密配合可靠地完成工序任务,在重复执行相同的动作时能保证工艺质量,工业机器人需要很高的定位精度和重复定位精度...
滚子轴承和滚珠轴承(减速器行业专题报告:对比Atlas看人形机器人商业化可能性)
...邱世梁、田子砚)1分析波士顿动力Atlas高成本来源看人形机器人商业化可能性波士顿动力Atlas机器人出色的运动性能为未来商用服务型人形机器人树立标杆。波士顿动力Atlas展现了全球最前沿的人形机器人科研进度,可以跑酷、...
滚子轴承和滚珠轴承(减速器行业专题报告:对比Atlas看人形机器人商业化可能性)
...邱世梁、田子砚)1分析波士顿动力Atlas高成本来源看人形机器人商业化可能性波士顿动力Atlas机器人出色的运动性能为未来商用服务型人形机器人树立标杆。波士顿动力Atlas展现了全球最前沿的人形机器人科研进度,可以跑酷、...
液压回转减速机马达(谐波减速器行业研究:多元需求藏变局,国产突围尤可期)
...来两个问题:电机直接输出的扭矩较小,无法承受负载;机器人关节转动不需要电机那样的高转速。因此,通常需要在电机的输出端安装减速器,从而降低转速,提升扭矩。同时在电机转动精度受限
液压回转减速机马达(谐波减速器行业研究:多元需求藏变局,国产突围尤可期)
...来两个问题:电机直接输出的扭矩较小,无法承受负载;机器人关节转动不需要电机那样的高转速。因此,通常需要在电机的输出端安装减速器,从而降低转速,提升扭矩。同时在电机转动精度受限
步进电机加减速越小(28BYJ-48步进电机介绍、驱动及编程)
...进电机在自动控制系统中应用广泛。3D打印机,写字机,机器人中都能见到它们的身影,高精度,高可靠的步进电机通常较贵。今天我们就先来介绍一种DIY小制作中常用的,并且便宜的不能再便宜的步进电机——28BYJ-48步进电机...
新式减速机(解码专精特新|智同科技:让工业机器人“关节”更灵活)
...小企业及北京市专精特新“小巨人”企业。公司主营工业机器人关节用高精密CRV减速机研发制造,减速机是机器人核心零部件,对工业机器人性能有着极大的影响。智同科技团队。受访者供图“第一次拜访并邀请张跃明教授共同...
机械手腕机构简图(2019郑州机床展|工业机器人四大新型的驱动方式)
工业机器人的传动 工业机器人的传动装置与一般机械的传动装置的选用和计算大致相同。但工业机器人的传动系统要求结构紧凑、重量轻、转动惯量和体积小,要求消除传动间隙,提高其运动和位置精度。工业机器人传动装置除齿...
滚珠丝杆商(机器人伺服电机行业研究:机器人关节动力源,看好国产厂商崛起)
(报告出品方:申万宏源研究)1.电机行业概览:万亿级市场,细分领域众多1.1电机技术:技术原理共通,延展性较强电机一般指电动机,亦称“马达”,可将电能转换为机械能,为用电器或各种机械提供驱动力,在现代工业和...