机器人上下料程序(DELMIA软件物流仿真:机器人输送带上下料虚拟仿真操作方法)
Posted
篇首语:人生处万类,知识最为贤。本文由小常识网(cha138.com)小编为大家整理,主要介绍了机器人上下料程序(DELMIA软件物流仿真:机器人输送带上下料虚拟仿真操作方法)相关的知识,希望对你有一定的参考价值。
机器人上下料程序(DELMIA软件物流仿真:机器人输送带上下料虚拟仿真操作方法)
概述
在工厂物流输送线上,为了降低人力成本、减少设备停机时间、提高自动化程度,很多情况下都是使用机器人进行上下物料。从本质上来讲,机器人上下料工艺就是一种物料的搬运操作,但是应用在不同的领域就会有不同的工艺要求。那么在使用DELMIA软件进行机器人输送带上下料虚拟仿真过程中也就同样需要对机器人物料搬运进行工艺调整,以便于能够与输送带物料输送工艺结合在一起,最终实现物料的连续上料、输送、下料工艺流程。本期,就来为大家介绍一下,在DELMIA软件中机器人输送带上下料虚拟仿真的操作方法。
机器人工作站布局
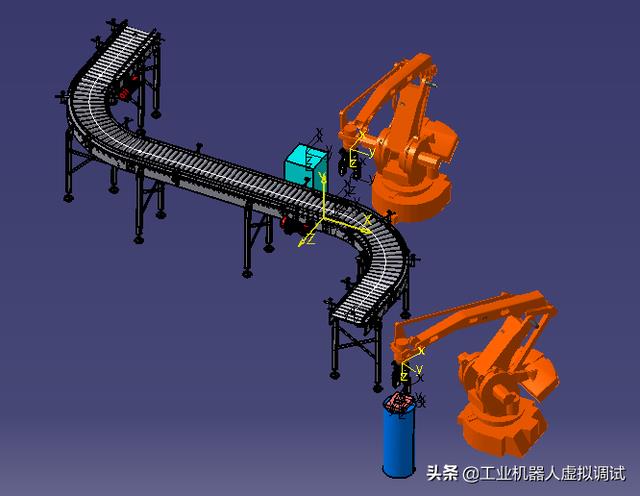
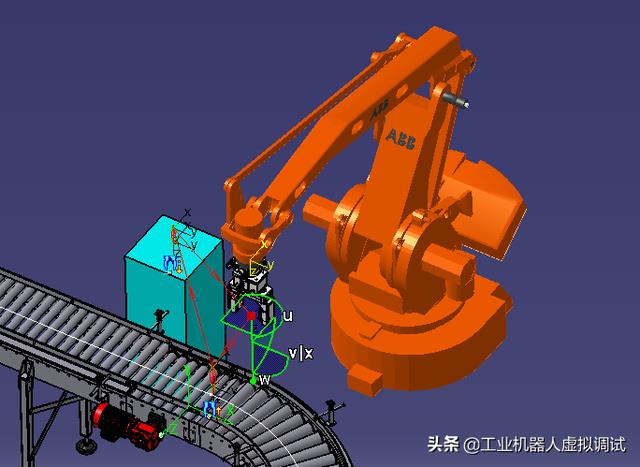
在DELMIA软件中进入“Resource Layout”模块,在上一期的曲线输送带物料输送案例的仿真环境中添加工作站资源,包含2台搬运机器人IRB 640、1个简易上料台(蓝色圆柱体)、1个简易放料台(青色长方体)、2个物料抓手工具,并对这些仿真资源进行简单的布局。
将物料抓手工具安装到机器人上,把输送物料放置到简易上料台上,然后分别在简易上料台物料放置位置、输送带物料输送起点位置、输送带物料输送终点位置、简易放料台物料放置位置,创建机器人抓取与放置物料的工艺坐标系。
上料机器人示教编程
将DELMIA软件切换到“Device Task Definition”模块,首先使用上方Simulation工具条中的“Save Initial State”命令保存当前工作站布局为初始状态。
然后使用“Teach a device”命令为上料机器人示教编程,包括机器人上料轨迹示教、机器人抓取与放置物料指令添加。上料机器人示教编程操作过程可参考前几期发布过的文章《DELMIA软件:机器人搬运仿真》,示教完成后的机器人操作程序如下图所示。
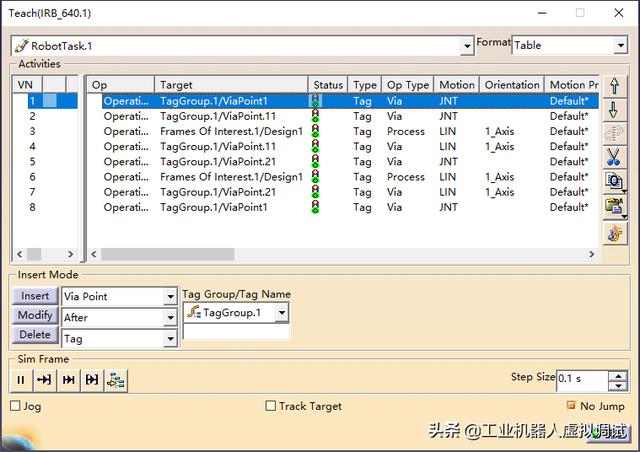
机器人上料运行轨迹、抓取与放置物料指令添加位置如下图红色指向线条所示。
下料机器人示教编程
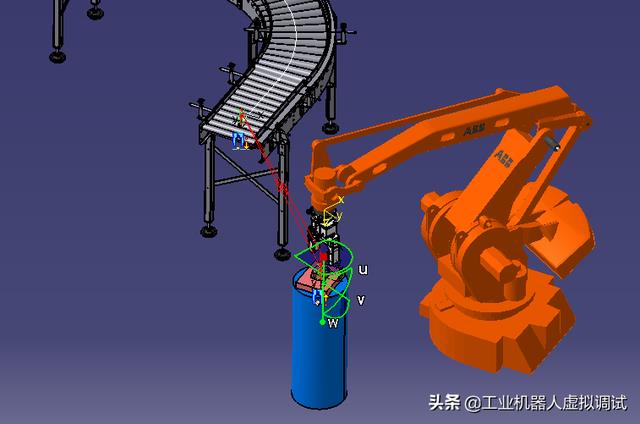
下料机器人示教编程过程与上料机器人示教编程过程类似,也是直接使用创建好的工艺点作为机器人的轨迹点位,不同的是下料机器人示教编程时没有物料数模可以抓取与放置,示教完成后的机器人操作程序如下图所示。
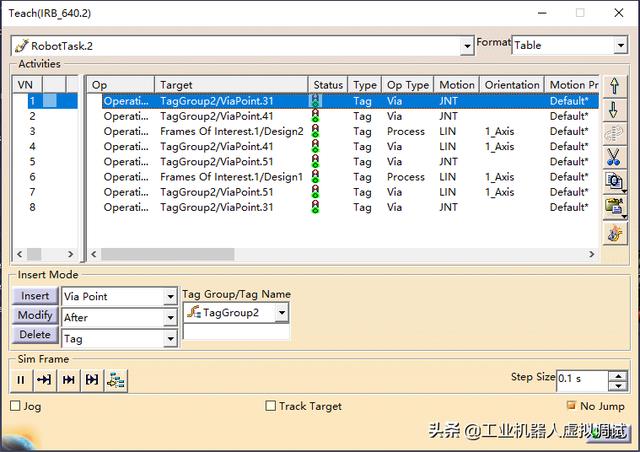
机器人下料运行轨迹、抓取与放置物料指令添加位置如下图红色指向线条所示。
机器人工作站工艺设定
能够把输送带输送物料与机器人上下料连接起来的关键就是对工作站中的工艺设定,工艺设定详细操作步骤可以查看早期发布过的文章《DELMIA软件:机器人工作站中基于Process的设备任务调用》、《DELMIA软件:机器人工作站中基于I/O信号的设备任务调用》。
切换到DELMIA软件的“Workcell Sequencing”模块,同样的首先使用上方Simulation工具条中的“Save Initial State”命令保存当前布局为初始状态。
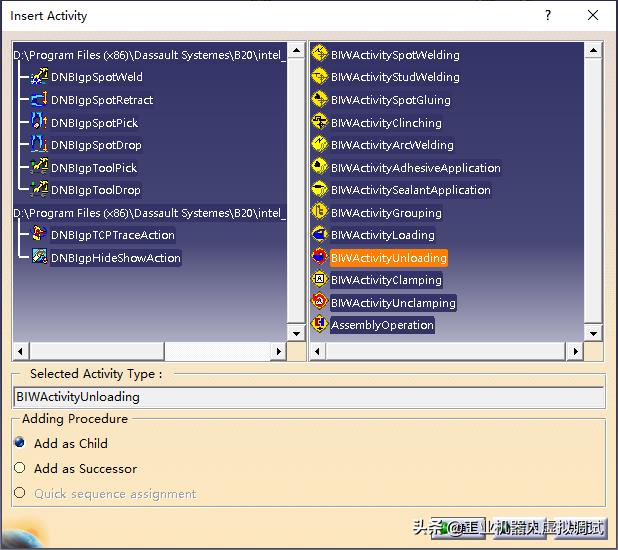
然后,使用“Insert Activity”命令为工作站添加机器人上料工艺节点,工艺节点可以自定义,也可以在工艺资源库中选择,本例中选择“BIWActivityUnLoading”作为机器人上料工艺节点。
使用“Assign a resource”命令,为机器人上料工艺节点分配资源,即把上料机器人资源关联到机器人上料工艺节点BIWActivityUnLoading中。
在Resource Program工具条中,使用“Set an Active Task”命令,将机器人上料运行程序添加到工艺资源节点BIWActivityUnLoading中。
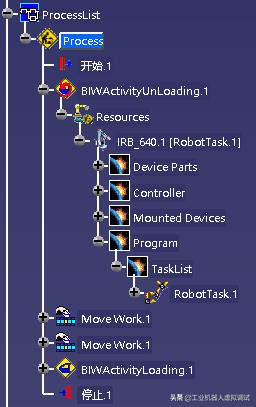
重复上述步骤,为下料机器人添加下料工艺节点BIWActivityLoading,并将机器人资源、机器人下料任务分别与下料工艺节点关联起来。
左侧工具条中使用“Open PERT Chart”命令,打开工艺设定操作窗口。将工艺节点按照物流输送工艺流程进行排序,本例工艺流程:开始→机器人上料→物料直线输送→物料曲线输送→机器人下料→停止。
工艺流程排序完成后,使用左侧工具条中的“Link the selected activities”命令,将工艺节点按照从左向右的顺序连接起来。

关闭Open PERT Chart窗口,返回机器人工作站仿真工作界面,至此,机器人工作站工艺设定完成。当然,为了工艺流程与真实的工作站更加的接近,也可以在工艺流程之间添加I/O信号,以准确监控上下游工艺之间的切换。
机器人工作站仿真运行
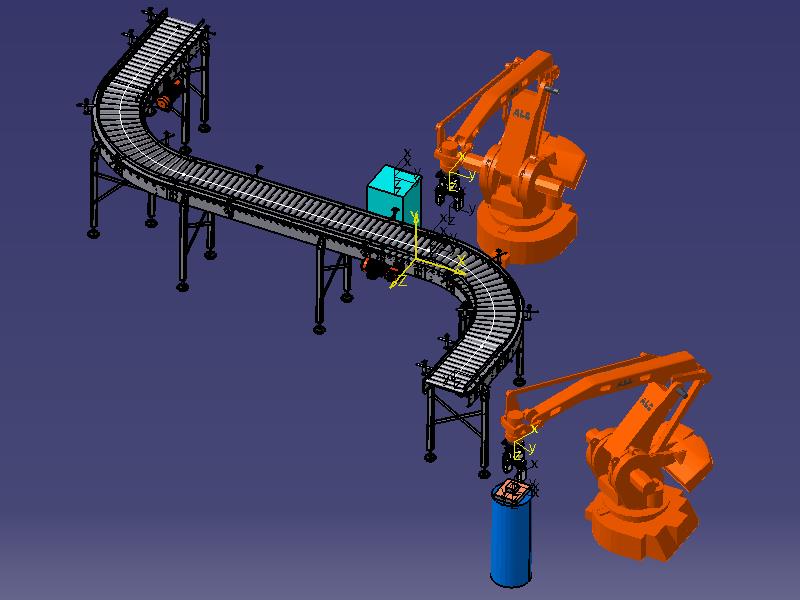
在DELMIA软件的“Workcell Sequencing”模块中,使用“Process Simulation”命令以真实的运行状态对上下料机器人工作站仿真运行,仿真运行效果如下动态图所示,可以看到上料机器人从简易上料台将物料搬运到输送带上输送起点位置处,然后物料在输送带上从起点输送到终点,最后下料机器人将物料从输送带输送终点位置处搬运到简易物料放置台上。
The End
上一篇:DELMIA软件物流仿真:带曲线转角输送带输送物料的仿真操作方法
相关参考
法兰加工专用机床(Robotstudio软件:机床上下料工作站机器人主逻辑编写与仿真运行)
前一期介绍了机器人数控机床上下料例行程序的编写,但是,也只是编写了机器人的运动程序,并没有进行信号逻辑控制程序的编写。本期,就来为大家介绍一下工作站信号控制逻辑的编写。概述机器人例行程序的控制逻辑主要...
机器人上下料(ROBOGUIDE软件机床上下料虚拟仿真:机器人机床上下料配置与编程)
概述机床上下料是工业机器人较为广泛的一种应用,尤其是与数控机床相互配合,共同完成工件加工,可实现全程无人参与。几个月之前写过一系列ROBOGUIDE软件机床上下料虚拟仿真的文章,但是由于种种原因文章只更新到了数控...
数控车床上下料(ROBOGUIDE软件机床上下料虚拟仿真:机器人机床上下料配置与编程)
概述机床上下料是工业机器人较为广泛的一种应用,尤其是与数控机床相互配合,共同完成工件加工,可实现全程无人参与。几个月之前写过一系列ROBOGUIDE软件机床上下料虚拟仿真的文章,但是由于种种原因文章只更新到了数控...
机器人焊枪(DELMIA软件教程之机器人工具自动切换工作站焊枪支架配置与插入)
上一期为大家介绍了机器人工具自动切换工作站中快换法兰的配置与安装方法,本期再来为大家介绍一下机器人焊枪支架的配置与插入方法。一、焊枪安装参考坐标系添加1.在“装配模块”中打开机器人点焊焊枪支架,然后使用...
机器人工作站(Roboguide软件:并联机器人仿真工作站机器人控制系统创建)
并联机器人以其运行速度快、重复精度高,已经被广泛应用于食品加工、医药、3C产品制造行业中进行高速拾取工作。Roboguide作为一款机器人仿真软件,除了对串联机器人进行仿真以外,是否可以对并联机器人进行仿真呢?答案...
abb机器人是瑞典通用电气布朗-博韦里旗下的。ABB是世界顶级的机器人制造商之一。他们以生产创新、可靠和智能的工业机器人、机器人工作单元和软件而闻名。流行的ABB机器人包括6640和IRB2400。虽然它们起源于瑞士,但ABB的业务...
张紧辊的张力是根据什么设定的(数字孪生 之 机器仿真|卷料仿真)
...系统的纸、纺织品、金属箔和塑料薄膜等卷材进行建模,仿真不同卷料速度和卷料厚度下的机器性能,帮助管理张力,优化卷筒速度和减少卷筒打滑,提升机器系统的性能,并且能够将卷料机器3-D可视化。卷料库包括压辊、浮动...
往复给料机生产(Robotstudio教程:自动给料装置机械装置创建)
前两期为大家介绍了机器人机床上下料仿真工作站中关于数控机床运动机构的创建,本期开始将为大家介绍自动给料装置运动机构的创建。一、自动给料装置数模处理1.自动给料装置用于对存放的工件进行自动投放,并将工件进...
随着机器人处理越来越复杂的任务,使用硬件原型开发机器人变得不切实际、危险或不可能。机器人专家越来越多地转向仿真,以获取有价值的数据,用于为其机器人设计硬件和软件组件,以及测试和验证其控制算法。模拟具有...
什么是上下料机器人?新兴工业时代,上下料机器人能满足“快速/大批量加工节拍”、“节省人力成本”、“提高生产效率”等要求,成为越来越多工厂的理想选择。上下料机器人系统具有高效率和高稳定性,结构简单更易于维...