机器人上下料(ROBOGUIDE软件机床上下料虚拟仿真:机器人机床上下料配置与编程)
Posted
篇首语:少年辛苦终身事,莫向光阴惰寸功。本文由小常识网(cha138.com)小编为大家整理,主要介绍了机器人上下料(ROBOGUIDE软件机床上下料虚拟仿真:机器人机床上下料配置与编程)相关的知识,希望对你有一定的参考价值。
机器人上下料(ROBOGUIDE软件机床上下料虚拟仿真:机器人机床上下料配置与编程)
概述
机床上下料是工业机器人较为广泛的一种应用,尤其是与数控机床相互配合,共同完成工件加工,可实现全程无人参与。
几个月之前写过一系列ROBOGUIDE软件机床上下料虚拟仿真的文章,但是由于种种原因文章只更新到了数控铣床运动机构的制作。时隔几个月,决定把最后的机器人机床上下料的内容也更新了,也为这个系列画上一个完满的句号。

数控机床属性配置
数控机床在虚拟仿真时,除了机床的仿真动作属性配置外(已在《ROBOGUIDE软件机床上下料仿真:数控铣床运动机构制作》文章中介绍),还有机器人上下料的属性配置。
数控铣床上放置工件的机构是铣床的工作台,在运行过程中机器人将工件放置到工作台上,铣刀完成铣削加工后,再由机器人将工件从工作台上取下,最后完成铣床上下料任务。这个过程中,数控铣床与工件发生关系的机构只有工作台,因此这里要配置的也是机床工作台的属性参数。
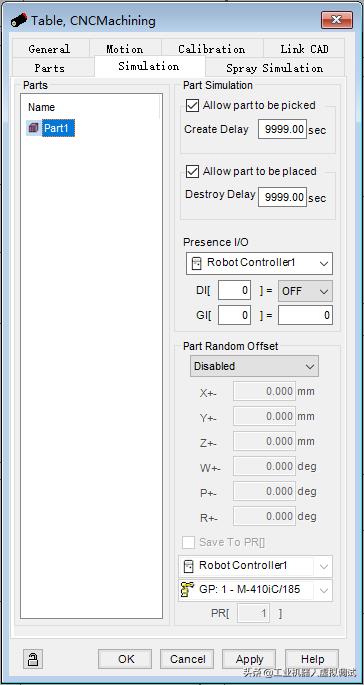
左侧浏览树中,在数控机床下双击机床的工作台文件Table,打开工作台属性配置对话框。切换到Parts功能选项卡中,按如下所示配置相关属性参数:
Parts:勾选Part1,点击Apply按钮,工件被安装到工作台上。
Part Offset:勾选Edit Part Offset,输入坐标值(0,0,100,-180,0,-90),调整工件在工作台上的安装位置和安装角度。
取消勾选“Visible at Teach Time”与“Visible at Run Time”选项,使得工件在机器人示教编程和仿真运行时均不显示。
全部属性参数配置完成后,再次点击Apply按钮。

切换到Simulation功能选项卡中,确认Part Simulation属性区域中 “Allow part to be picked”和“Allow part to be placed”选项已勾选,即保证工件在机床工作台上允许被机器人抓取和放置,点击OK按钮。
机器人仿真程序编写
ROBOGUIDE软件中机器人抓取与放置工件的仿真动作是通过编写仿真程序实现的,机床上下料机器人共有两个抓取与放置工件的过程:一、从上料工位(本例为输送带)抓取工件,然后将工件放置到机床的工作台上;二、从机床工作台上抓取工件,然后将工件放置到下料工位(本例为物料托盘)上。因此,这里需要创建四个仿真程序。
左侧浏览树中点选用于机床上下料的机器人控制器(如Robot Controller2),然后在“Teach”下拉菜单中点击“Add Simulation Program”,输入仿真程序名称,打开仿真程序编辑器对话框。
按照机器人的工作顺序分别创建仿真程序,在仿真程序编辑器中点击“Inst”按钮,添加仿真程序指令,并设置指令参数,详细设置如下所示:
程序名称:PICK_FROM_CNV,机器人从输送带上抓取工件仿真程序。
仿真程序指令:Pickup,机器人抓取工件仿真程序指令。
Pickup:Part1,抓取工件Part1。
From:Conveyer:Link1,从输送带上抓取工件。
With:GP:1-UT:1(Eoat1),将抓取到的工件安装到机器人的末端工具上,本例为吸盘工具。

程序名称:DROP_TO_CNCM,机器人放置工件到数控机床工作台仿真程序。
仿真程序指令:Drop,机器人放置工件仿真程序指令。
Drop:Part1,放置工件Part1。
From:GP:1-UT:1(Eoat1),从机器人末端工具上拆除工件。
On:CNCMachining:Table,将工件放置到数控机床工作台上。

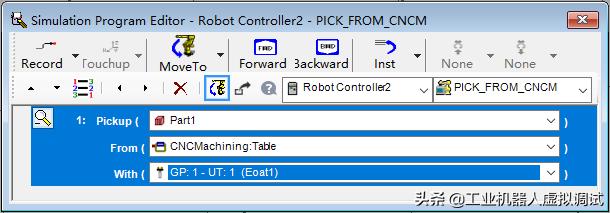
程序名称:PICK_FROM_CNCM,机器人从数控机床工作台上抓取工件仿真程序。
仿真程序指令:Pickup。
Pickup:Part1。
From:CNCMachining:Table,从数控机床工作台上抓取工件。
With:GP:1-UT:1(Eoat1)。
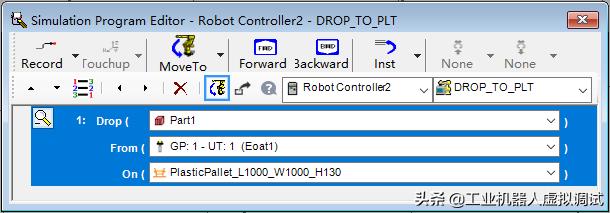
程序名称:DROP_TO_PLT,机器人放置工件到物料托盘仿真程序。
仿真程序指令:Drop。
Drop:Part1。
From:GP:1-UT:1(Eoat1)。
On:PlasticPallet_L1000_W1000_H130,将工件放置到物料托盘上。
机器人机床上下料示教编程
按照机床上下料的工作流程编写机器人程序,可以在之前的输送带上下料机器人程序中直接做修改,相关内容可参见文章《ROBOGUIDE软件:机器人输送带上下料虚拟仿真操作方法》。
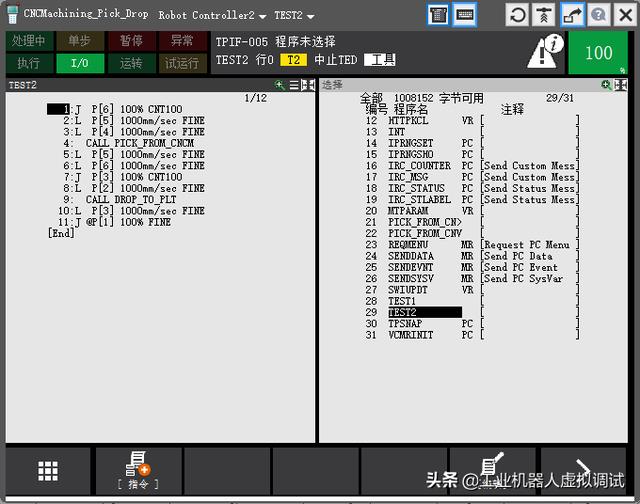
机床上下料机器人主程序为TEST1。

主程序TEST1的剩余部分程序。

机器人初始化子程序INT,主要控制数控机床的各个运动机构返回零点位置。

TEST2是机器人从数控机床上抓取工件,并将工件放置到物料托盘上。
机器人生产线仿真运行
点击“Test-Run”菜单,在其下拉菜单中选择“Run Configuration”,打开仿真运行配置对话框。在对话框中确认所有的机器人控制器均设置为“Run”,即激活仿真运行,点击OK按钮。

左侧浏览树中两台机器人都选择主程序后,就可以仿真运行了,仿真运行效果如下方动态图所示。可以看到两台机器人互相配合,共同完成了工件的输送与机床上下料工作。

关于输送带物料输送和机器人输送带上料虚拟仿真相关内容,可以参见之前发布过的文章《ROBOGUIDE软件:机器人产线输送带输送物料虚拟仿真操作》和《ROBOGUIDE软件:机器人输送带上料虚拟仿真操作方法》。
The End
上一篇:ROBOGUIDE软件:机器人安全围栏批量自动生成功能介绍与使用方法
相关参考