普通电机加编码器(编码器的详解,教你学会普通电机到“伪伺服”的转换)
Posted
篇首语:没有完美的个人,只有完美的团队!本文由小常识网(cha138.com)小编为大家整理,主要介绍了普通电机加编码器(编码器的详解,教你学会普通电机到“伪伺服”的转换)相关的知识,希望对你有一定的参考价值。
普通电机加编码器(编码器的详解,教你学会普通电机到“伪伺服”的转换)
电机的定位精度从高到低可以分为:伺服电机、步进电机、普通三相电机,我们知道伺服电机的精度是非常高的,它与普通电机有什么区别或者有什么特殊功能,简答来说两点:1脉冲控制、2编码器脉冲反馈。

伺服电机
形象点说脉冲控制就是把一圈360°分为好多脉冲,驱动器发多少脉冲就走多少角度,而编码器就像眼睛一样一直在盯着电机,电机转多少,它就能看到有多少个脉冲,刚好形成闭环,所谓的闭环就是信息的反馈,意思就是有命令的发送、有返回信息,例如,我要求电机转180°,驱动器发送5000个,电机使能启动,此时编码器就开始在数着脉冲,等从0数到了5000,就返回一个停止命令,电机立刻停止,这就是简单的闭环控制。而步进电机与伺服的区别就是它光有发送命令的功能,由于不带编码器没有反馈信息就是光发送脉冲指令,可以看出步进电机是一个开环控制,发多少个脉冲开始就转,至于到低转多少,它是不知道;普通电机两者都没有就是一个“大撒手”,一通电就旋转,停电就停止,如何能让普通电机像伺服电机一样进行信息反馈,需要添加编码器,所以编码器很重要,今天我们就说下这个“眼睛”
编码器工作原理
编码器脉冲输出
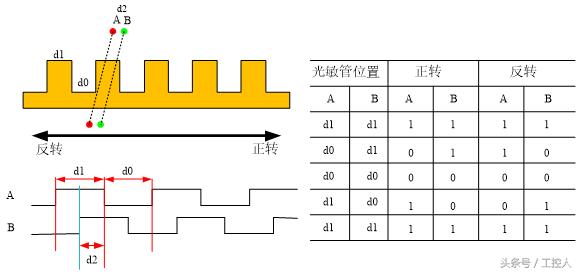
这里我们以增量式光电旋转编码器为例说明脉冲输出为ABZ三相,为了方便说明,将圆形光栅盘拉成矩形的,AB为两个距离相差d2的光敏管,一个角度码盘的光栅距离为d0和d1,AB光敏管在d1有输出。
正转时候
1开始时候AB都位于d1位置,此时AB都有输1;
2随着轴的转动,A位于d0范围,B扔位于d1范围,此时A输出0,B输出1;
3轴继续旋转,A和B都位于d0范围,AB都输出0;
4轴继续旋转,A位于d1范围,B扔处于d0范围,此时A输出1,B输出0;
5轴继续旋转,AB都位于d1范围,输出都为1;
6输出按照步骤1~5循环
反转时候
1开始时候AB都位于d1位置,此时AB都有输1;
2随着轴的转动,B位于d0范围,A还位于d1范围,此时A输出1,B输出0;
3轴继续旋转,A和B都位于d0范围,AB都输出0;
4轴继续旋转,A位于d0范围,B扔处于d1范围,此时A输出0,B输出1;
5轴继续旋转,AB都位于d1范围,输出都为1;
6输出按照步骤1~5循环
可以看出正转和反转的时候,AB的状态输出是不一样的,通过比较就能轻易分辨编码器旋转方向,一般使用手册说是AB相位差90°或90±45°,意思是一样的,此时的360°可以理解为d0+d1总长度,相差的90°就是(d1+d0)/4,也就是AB的距离d2。
再来说说它是怎么计算脉冲的,一个圆形光栅盘均分成n个,旋转时,A和B从位置d0到d1,AB通输出一次就检测到一个脉冲,旋转一圈A和B的输出脉冲量是一样的,只不过检测时候谁前谁后的问题。这里我们在PLC程序中监控下编码器单相输出以及上述脉冲过程,采用欧姆龙E6B2-CWZ6C, A相接X0,B相接X1,采用高速单相计数器C235计A相输出,C236计B相输出:
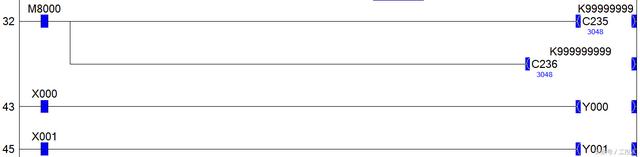
单相计数器C235、C236
采用双相计数器C251:

双相双计数C251
两者区别是, 单相单计数只计数不自动识别旋转方向,正反转计数不自动增减, 如果不进行设置默认增计数, 而双相双计数会自动根据旋转方向对计数进行增或减计数例如正转增计数, 反转减计数。
编码器定位功能
上述我们说了编码器如何对脉冲进行计数, 将角度位移转成直线位移来实现定位功能, 在说编码器定位功能时, 先说下较早时候或精度要求不高的场合采用接近开关实现定位的方法, 虽然精度不高, 但原理确实一样的。
1接近开关定位
我们以下图来说明,电机带动6mm螺纹距的丝杆进行移动,把一个圆盘均分成6快齿轮似的,这样的话,电机每转一圈,接近开关会检测到6个信号,每个信号代表1mm,这样就实现了简单的定位功能。编码器与这个检测齿轮功能一样,也是检测信号的, 只不过它的精度要比它高多了, 这个齿轮是一圈6个脉冲信号,每个脉冲代表1mm,编码器2000P/R的就是一圈2000个脉冲信号, 每个脉冲代表6/2000mm, 伺服电机的编码器更高, 例如17位的160000脉冲每转。

接近开关定位
2编码器定位
和接近开关定位原理一样如下图:

编码器定位
这样讲编码器与电机主轴通过联轴器进行连接, 编码器就获得电机旋转的信号进行反馈, 通过PLC控制器来完成数据监控就可以达到闭环控制, 普通三相电机+ 编码器实现“伪伺服”的效果。
下面通过PLC程序检测高速计数器对脉冲的计数过程:
相关参考
...可领取138G伺服与机器人专属及电控资料!三菱伺服电机编码器怎么零点调整专伺服电机编码器零点调整只有生产厂家有自己的技术,外人很难知道,这牵扯到核心技术,就算有些人能调,但是肯定不准。而且需要专门的仪器配...
三菱伺服电机编码器怎么零点调整专伺服电机编码器零点调整只有生产厂家有自己的技术,外人很难知道,这牵扯到核心技术,就算有些人能调,但是肯定不准。而且需要专门的仪器配合调整。徒手调整是装不好一个绝对编码器...
...。当然,如果单纯看性能,确实差一些,倒不是它不能安编码器,而是它只有在低转速情况下才有较大转矩,高转速时丢转矩就很明显了。所以,我们要根据实际的项目要求选择最恰当
步进伺服电机维修(「干货分享」伺服、步进、变频三大控制要点详解)
...成电磁场,转子在此磁场的作用下转动,同时电机自带的编码器反馈信号给驱动器,驱动器根据反馈值与目标值进行比较,调整转子转动的角度。伺服电机的精度决定于编码器的精度(线数)。2.伺服系统的组成及分类【组成】...
特种电机的种类和应用(「干货分享」伺服、步进、变频三大控制要点详解)
...成电磁场,转子在此磁场的作用下转动,同时电机自带的编码器反馈信号给驱动器,驱动器根据反馈值与目标值进行比较,调整转子转动的角度。伺服电机的精度决定于编码器的精度(线数)。2.伺服系统的组成及分类【组成】...
特种电机的种类和应用(「干货分享」伺服、步进、变频三大控制要点详解)
...成电磁场,转子在此磁场的作用下转动,同时电机自带的编码器反馈信号给驱动器,驱动器根据反馈值与目标值进行比较,调整转子转动的角度。伺服电机的精度决定于编码器的精度(线数)。2.伺服系统的组成及分类【组成】...
...是区别。两者不是一个概念。伺服电机可以是普通电机+编码器+伺服驱动器。靠伺服驱动器控制消除电机的滑差。所以无论有没有负载都很准确的达到所要的转速或位置。同步电机在空载下可能同步,但负载超过一定量的时候就...
...成电磁场,转子在此磁场的作用下转动,同时电机自带的编码器反馈信号给驱动器,驱动器根据反馈值与目标值进行比较,调整转子转动的角度。伺服电机的精度决定于编码器的精度(线数)。2伺服系统的组成及分类组成:伺...
...成电磁场,转子在此磁场的作用下转动,同时电机自带的编码器反馈信号给驱动器,驱动器根据反馈值与目标值进行比较,调整转子转动的角度。伺服电机的精度决定于编码器的精度(线数)。2伺服系统的组成及分类组成:伺...
松下伺服位置模式下扭矩多大(伺服、步进、变频三大控制要点详解)
...成电磁场,转子在此磁场的作用下转动,同时电机自带的编码器反馈信号给驱动器,驱动器根据反馈值与目标值进行比较,调整转子转动的角度。伺服电机的精度决定于编码器的精度(线数)。2伺服系统的组成及分类组成:伺...