昆虫的仿生学的例子(仿生学再次立功四个机械臂伸出数万个小钢爪,征服所有行星表面)
Posted
篇首语:万事须己运,他得非我贤。本文由小常识网(cha138.com)小编为大家整理,主要介绍了昆虫的仿生学的例子(仿生学再次立功四个机械臂伸出数万个小钢爪,征服所有行星表面)相关的知识,希望对你有一定的参考价值。
昆虫的仿生学的例子(仿生学再次立功四个机械臂伸出数万个小钢爪,征服所有行星表面)
出品:太空伊卡洛斯
编者按:LEMUR机器人已经进化出三代,NASA希望这类机器人在未来探索太空中可以派上用场。以第三代LEMUR机器人为例,已进化为4足,每个肢体上分布着16个手指式吸盘,每个吸盘上还有数百个小钢钩,这使得它能够依靠人工智能完美地避开前行道路上的阻碍,适用于在崖壁上工作。
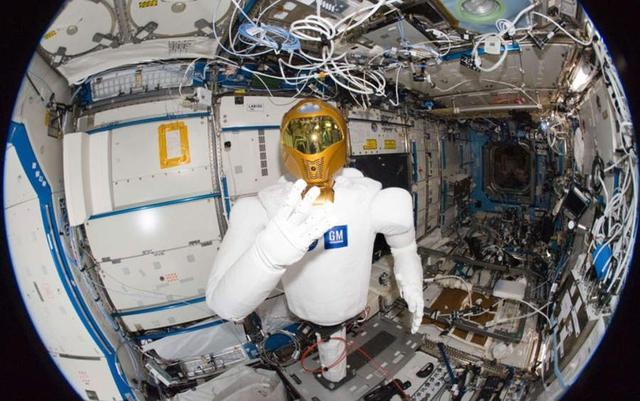
毫无疑问,NASA在无人机器人系统领域处于比较领先的位置,比如登陆火星的好奇号、机遇号等,都是行星勘测领域的机器人代表作。各种着陆器、行星际探测器也是如此,它们遍布太阳系各个角落,在国际空间站上,还有Robonaut 2类人形机器帮助宇航员进行各种科研活动。未来,NASA希望未来机器人能承担更多的任务,不仅能穿越平原和陨石坑,还能进一步去探索悬崖、极地冰盖和其他目前还未能到达的地方。

这一切的前提就是今天的主角,LEMUR机器人,该平台正在NASA的喷气推进实验室研发。LEMUR机器人全称叫做多足短途全能机械,在20年前就已经开始研发,第一代LEMUR机器人可在桁架结构上行走,并定点作业,适用于国际空间站,拥有6足结构。笔者认为,第一代LEMUR有很大的局限性,只能在空间站上使用,但仍然符合NASA所定义的多足配置。

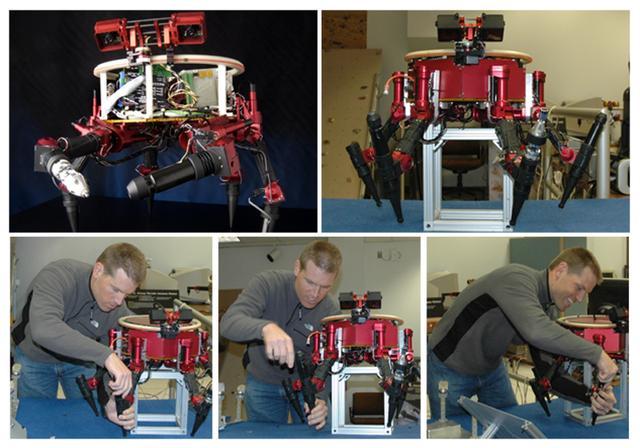

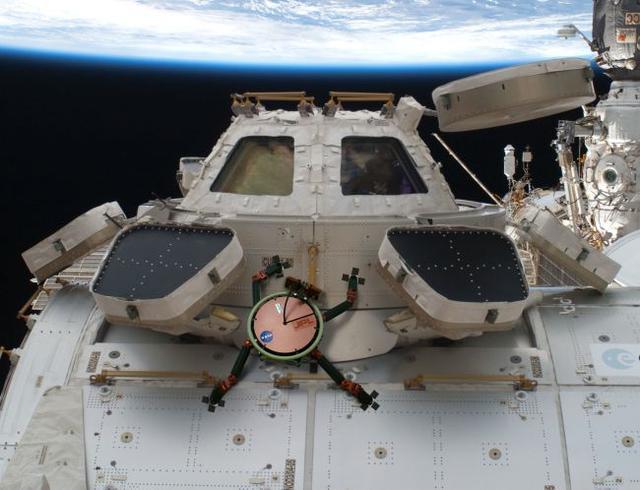
第二代LEMUR机器人在高度上有很大的变化,形似甲虫,LEMURIIa型号后四肢有相同的自由度,可实现站立、爬行,两个前肢可作为机械臂使用,俨然是个机械昆虫的造型,也是仿生学的又一个应用。LEMURIIb将两个前肢去掉,变成了四足爬行状,与螃蟹比较相似,这是一种侧重于攀爬的机器人。攀爬系统涉及到末端传感器、微操控制、关节设计等,因此我们可以看到LEMURIIb在国际空间站外表面进行爬行。不论是垂直面还是悬崖峭壁,LEMURIIb都可以得心应手。LEMURIIb在过去几年已经在空间站上执行任务,作为一个修理机器人使用,如果要想在行星表面自由行走,则需要一种可行走、攀爬和爬行能力的机器人,这样才能胜任在火星或者其他太阳系卫星寻找生命的工作。
第三代LEMUR机器人已经进化了很多,通过图片可以看到,第三代LEMUR进化为4足,每个肢体上分布着16个手指式吸盘,每个吸盘上还有数百个小钢钩,这使得它能够依靠人工智能完美地避开前行道路上的阻碍,适用于在崖壁上工作。在悬崖上作业期间,第三代LEMUR借助一整套科学仪器能够搜索并采集到古代化石的样本。这种能力将给行星表面的生物探测带来很大便利,因为它可以采集到古代湖泊中的沉积物,其中蕴藏着生命的证据。而这也是目前好奇号火星车在盖尔陨石坑的夏普山所做的工作。好奇号之所以没有获得更大的成就,很可能就受限于地貌,只能在平原上行驶,无法爬行进入悬崖峭壁。
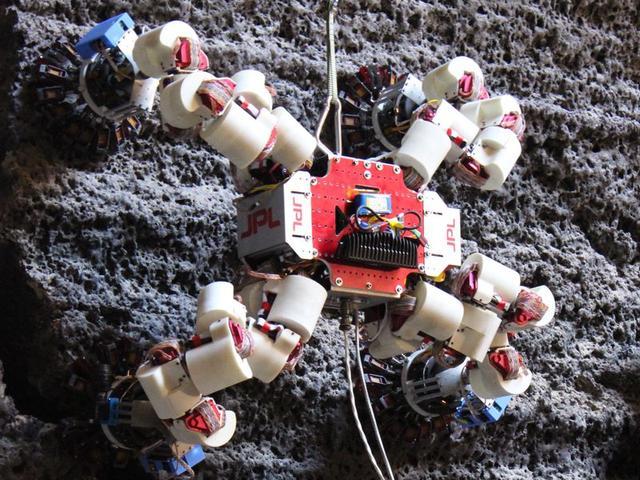

第三代LEMUR也进化出了冰蠕虫模式,NASA希望这类机器人在未来探索太空中可以派上用场。第三代LEMUR冰蠕虫版本可在诸如木卫二的冰山上活动,或者在冥王星上的氮冰悬崖上移动。该平台的设计参考了仿生学原理,依靠自身重量和伸展的四肢在冰冷的表面移动,堪称行星壁虎。
在攀爬冰山采集样本时,冰蠕虫将其中一个肢体钻入冰山保持稳定,同时可以通过人工智能进行导航来选择最佳的前进路线。冰蠕虫版本已经在南极冰川和圣海伦冰洞内进行了测试,未来这类机器人将很可能被用于探寻地外生命,比如,前往土星和木星的冰冷卫星考察它们是否有生命迹象。
相关参考