旋转减速机图片(偏心摆动型减速机,机器人关节一样能用)
Posted
篇首语:不读书的人,思想就会停止。本文由小常识网(cha138.com)小编为大家整理,主要介绍了旋转减速机图片(偏心摆动型减速机,机器人关节一样能用)相关的知识,希望对你有一定的参考价值。
旋转减速机图片(偏心摆动型减速机,机器人关节一样能用)
偏心摆动型减速机

具有内齿轮和内啮合于该内齿轮的同时进行摆动旋转的外 齿轮。内齿轮的内齿与外齿轮的外齿其齿数差设定为“1 个”,且呈外齿轮在内齿轮的内侧 摆动时取出根据该齿数差而产生的内齿轮与外齿轮的相对旋转的结构。这种偏心摆动型减 速机能够以 1 个级获得较高的减速比,而且,例如与平行轴型减速机等相比,侧隙较小。因 此,在机械手或机床等小型且要求较高定位精确度的工业用机械中被广泛采用。

然而,在近几年的工业用机械中,定位精确度的要求越来越高。因此,尤其在通过 多个工业用机械大量生产相同的部件或装置时,能够指出如下问题 :即便在各个工业用机 械上应用相同的控制程序,各个工业用机械中的位置精确度也会根据组装于各工业用机械 上的减速机的个体差异而不同,因此需要在开始运行之前进行调整工作。

总而言之,该问题由于因组装的减速机的个体差异而在多个工业用机械之间产生 个体差异,因此基本上要求提高所组装的减速机本身的制造精确度来减小各个减速机的个 体差异。然而,目前现有的组装于工业用机械的偏心摆动型减速机的制造精确度已经达到 相当高的水准,如果要进一步提高减速机的制造精确度,则导致减速机具有极高的成本。

机械手 ( 工业用机械 ) 的减速机组
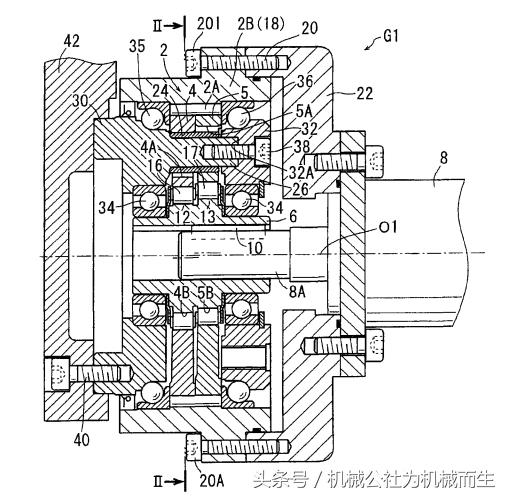
该减速机 G1 是中心曲柄式偏心摆动型减速机,具有内齿轮 2 和内啮合于该内齿轮 2 的同时摆动旋转的外齿轮 4、5。

减速机 G1 的输入轴 6 经键 10 与马达 8 的马达轴 8A 连结。该输入轴 6 一体地具 备用于摆动外齿轮 4、5 的偏心体 12、13。即,输入轴 6 作为配置于内齿轮 2 的轴心 O1 位置 的中心曲柄式偏心体轴发挥作用。偏心体 12、13 其外周相对于输入轴的轴心 ( 与 O1 相同 ) 偏心。偏心体 12、13 的偏心相位错开 180 度。在偏心体 12、13 的外周经偏心体轴承 16、17 组装所述外齿轮 4、5,该外齿轮分别内啮合于内齿轮 2。符号 4B、5B 为偏心体轴承 16、17 的 轴承孔。内齿轮 2 由构成内齿的圆柱状内齿销 2A 和具有支承该内齿销 2A 的销槽 2C 的内齿 轮主体 2B 构成。内齿轮 2 的内齿轮主体 2B 与外壳 18 成为一体,经第 1 ~第 16 螺栓 20A ~ 20P( 参照图 2) 与机械手 ( 省略整体图示 ) 的第 1 臂 22 连结。第 1 臂 22 支承马达 8。,内齿轮 2 的内齿数量为“60 个”,外齿轮 4、5 的外齿数量为“59 个”,内齿轮 2 的内齿数量比外齿轮 4、5 的外齿数量仅多 1 个。另外,齿数差不限定于 1 个, 也可为 2 个以上。外齿轮 4、5 上贯穿并形成有多个 ( 在该实施方式中为 6 个 ) 内销孔 4A、 5A,覆盖滑动促进部件 24 的内销 ( 销部件 )26 留有间隙地嵌合该内销孔 4A、5A。

外齿轮 4、5 的轴向两侧配置有第 1、第 2 轮架体 30、32,经轴承 34 支承输入轴 6,并 且经主轴承 35、36 支承于外壳 18。所述内销 26 与其中的第 1 轮架体 30 成为一体,并经螺 栓 38 与第 2 轮架体 32 的凹部 32A 连结,从而连结该第 1、第 2 轮架体 30、32。第 1 轮架体 30 经螺栓 40 与机械手的第 2 臂 42 连结。

简单说明减速机 G1 的减速作用,若输入轴 6 通过马达 8 的旋转而旋转,则偏心体 12、13 一体地旋转,外齿轮 4、5 经偏心体轴承 16、17 摆动。若这样,外齿轮 4、5 与内齿轮 2 的啮合位置逐渐偏离,偏心体 12、13 每旋转 1 圈,外齿轮 4、5 相对于内齿轮 2 仅相对旋转 ( 自转 ) 相当于齿数差“1”的“1/59”齿量。
该自转成分经内销 26 传递于第 1、第 2 轮架体 30、32,从而传递于经螺栓 40 与第 1 轮架体 30 连结的第 2 臂 42。内齿轮主体 2B 经第 1 ~第 16 螺栓 20A ~ 20P 与第 1 臂 22 连结,因此结果通过输入轴 6( 偏心体 12、13) 旋转,使第 2 臂 42 相对于第 1 臂 22 以“1/59” 的减速比减速旋转。
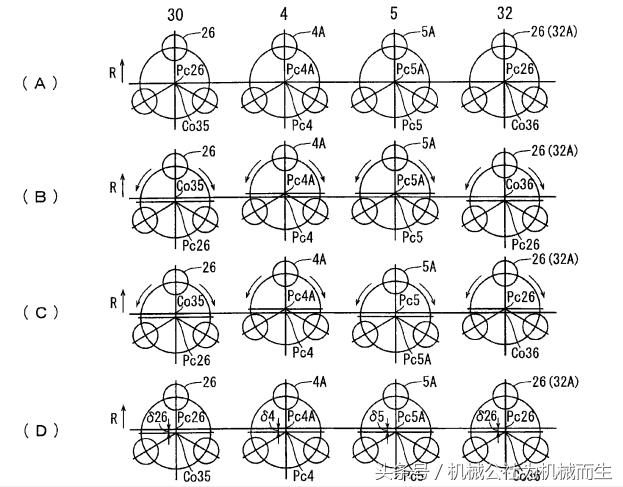
方便起见,对同一种的部件使用与之前的实施方式相同的 符号来进行说明。在该实施方式中,在制造内齿轮 2 的阶段 ( 安装外齿轮 4、5 之前的阶段 ) 实际检查由内齿轮 2 的原节圆 Pr2 相对于正圆形节圆 Pr2c 的制造误差 δPr2。具体而言, 在多处测量内齿轮 2 的内径,并确定长轴方向 L2、短轴方向 S2。内齿轮 2 的原节圆 Pr2 是 内齿轮主体 2B 的销槽 2C 的原节圆,最好为正圆形,但实际上因制造误差不会成为正圆形而 成为椭圆形。
其结果,组装于销槽 2C 内的内齿销 2A 的原节圆也成为椭圆。现在,例如已明 确原来应成为如以图 4(B) 的虚线所示的正圆形节圆 Pr2c 的内齿轮 2 的原节圆 Pr2 形成为 如实线所示的长轴方向 L2 及短轴方向 S2 所存在的椭圆形。
【机械公社】致力于提供机械的行业技术 ,为行业人士建立和拓展全技术能力提供技术服务,是机械行业一个跨屏技术互动应用系统。更多行业技术请关注信 机械公社圈


相关参考