怎么区分角度大小(复数和相量)
Posted
篇首语:精神的浩瀚,想象的活跃,心灵的勤奋,就是天才。本文由小常识网(cha138.com)小编为大家整理,主要介绍了怎么区分角度大小(复数和相量)相关的知识,希望对你有一定的参考价值。
怎么区分角度大小(复数和相量)
电气工程中用于将电阻、电流或直流电压加在一起的数学使用所谓的实数
但实数并不是我们需要使用的唯一一种数字,尤其是在处理与频率相关的正弦源和向量时。除了使用普通数或实数外,还引入了复数以允许使用负数的平方根√ -1来求解复杂方程。
在电气工程中,这种类型的数字称为“虚数”,为了区分虚数和实数,使用字母“ j ”,在电气工程中通常称为j 运算符。因此字母“ j ”放在实数前面表示其虚数运算。
虚数的示例有:j3、j12、j100等。复数由两个不同但非常相关的部分组成,一个“实数”加上一个“虚数”。
复数表示参考两个不同轴的二维复数或 s 平面中的点。水平轴称为“实轴”,垂直轴称为“虚轴”。复数的实部和虚部分别缩写为 Re(z) 和 Im(z)。
由实数(有源分量)和虚数(无功分量)组成的复数可以按照与使用初等代数分析直流电路完全相同的方式添加、减去和使用。
数学中用于虚数加法或减法的规则和定律与实数相同,j2 + j4 = j6 等。唯一的区别在于乘法,因为两个虚数相乘会变成负实数。实数也可以被认为是一个复数,但虚部为零,标记为 j0。
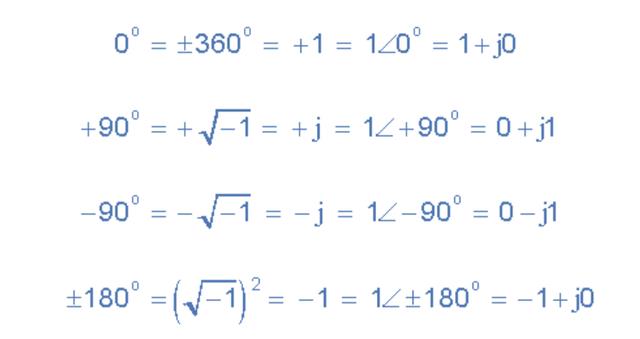
j运算符的值恰好等于√ -1,因此“ j ”、( j x j ) 的连续乘法将导致j具有以下值-1、-j和+1。由于 j 运算符通常用于表示向量的逆时针旋转,因此“ j ”、j 2、 j 3等的每次连续乘法或幂将迫使向量逆时针旋转 90 o的固定角度方向如下图。同样,如果向量相乘的结果是 -j 运算符则相移将为-90 °,即顺时针旋转。
j 运算符的矢量旋转
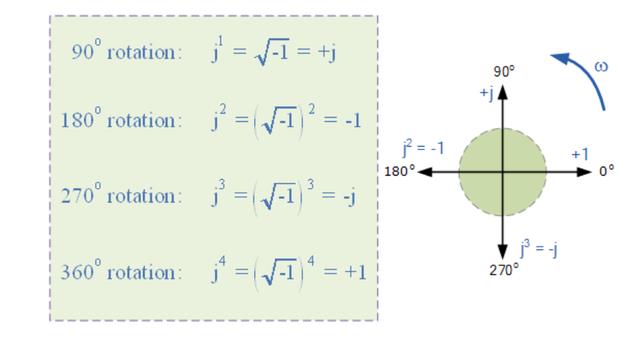
因此,将一个虚数乘以j 2会将矢量逆时针旋转 180 o,乘以j 3将其旋转 270 o,乘以j 4将其旋转 360 o或回到其原始位置。乘以j 10或乘以j 30将导致向量逆时针旋转适当的量。在每次连续旋转中,矢量的大小始终保持不变。
在电气工程中,有不同的方法可以用图形或数学方式表示复数。一种使用余弦和正弦规则的方法称为Cartesian或Rectangular Form。
使用矩形形式的复数
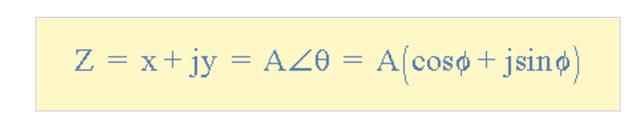
在上一个关于Phasors的教程中,我们看到复数由实部和虚部表示,其一般形式为:
- 在哪里:
- Z – 是表示向量的复数
- x – 是实部或活动组件
- y – 是虚部或反应分量
- j – 由√ -1 定义
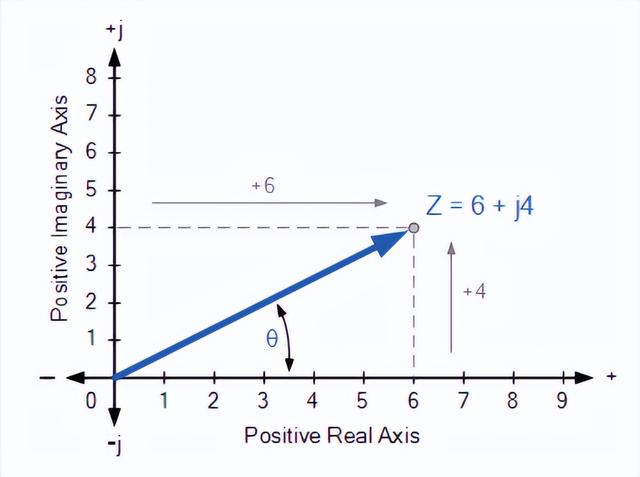
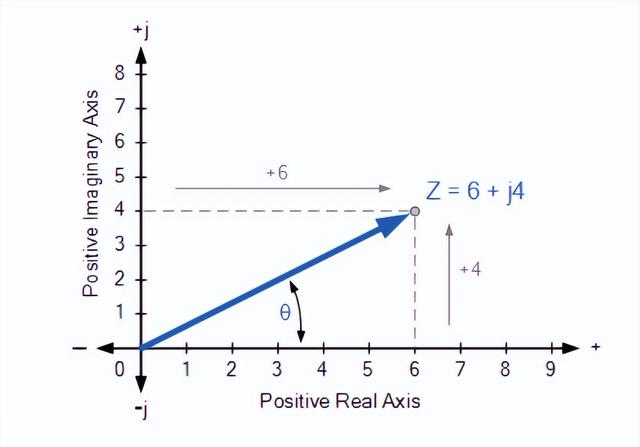
在矩形形式中,复数可以表示为称为复数或s平面的二维平面上的一个点。因此,例如,Z = 6 + j4表示一个点,其坐标表示水平实轴上的 6 和垂直虚轴上的 4,如图所示。
使用复数或 s 平面的复数
但由于矩形复数的实部和虚部既可以是正数也可以是负数,那么实轴和虚轴也必须同时向正和负方向延伸。然后这会产生一个具有四个象限的复平面,称为Argand 图,如下所示。
四象限阿甘图
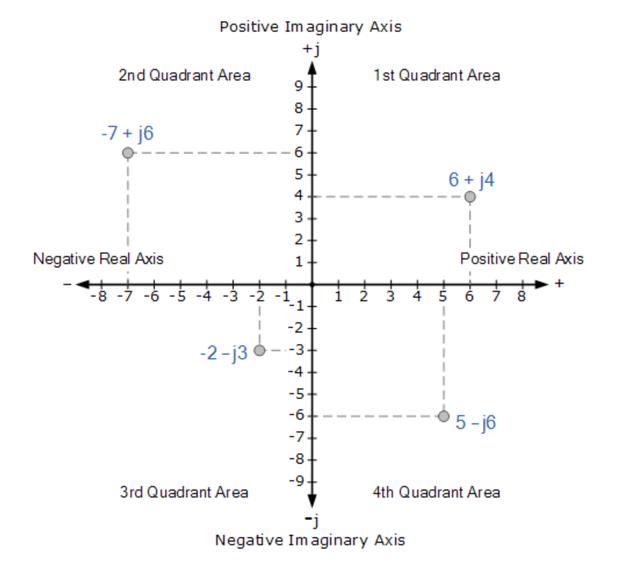
在 Argand 图上,水平轴表示垂直虚轴右侧的所有正实数和垂直虚轴左侧的所有负实数。所有正虚数都表示在水平轴上方,而所有负虚数都在水平实轴下方。然后,这会生成一个二维复平面,其中有四个不同的象限,分别标记为QI、QII、QIII和QIV。
上面的 Argand 图也可用于将旋转相量表示为复平面中的一个点,其半径由相量的大小给出,每 2π/ω 秒围绕它画一个完整的圆。
然后我们可以进一步扩展这个想法,以显示旋转 90度的极坐标和矩形形式的复数的定义。
复数也可以有“零”实部或虚部,例如:Z = 6 + j0或Z = 0 + j4。在这种情况下,点直接绘制在实轴或虚轴上。此外,可以使用简单的三角学计算复数的角度来计算直角三角形的角度,或者从正实轴开始围绕 Argand 图逆时针测量。
然后 0 和 90 o之间的角度将在第一象限 ( I ) 中,角度 ( θ )在第二象限 ( II ) 中的 90 和 180 o之间 。第三象限 ( III ) 包括 180 度到 270 度之间的角度,而完成整个圆的第四和最后一个象限 ( IV ) 包括 270 度到 360度 之间的角度,依此类推。在所有四个象限中,可以从以下位置找到相关角度:
tan -1 (虚部 ÷ 实部)
复数的加减法
复数的加法或减法可以以数学方式或以矩形形式以图形方式完成。另外,首先将实部相加形成和的实部,然后将虚部相加形成和的虚部,这个过程如下以两个复数A和B为例。
复杂的加减法
复数示例 No1
两个向量分别定义为A = 4 + j1和B = 2 + j3。以矩形 ( a + jb ) 形式和图形方式确定两个向量的和与差 作为 Argand 图。
数学加减法
添加
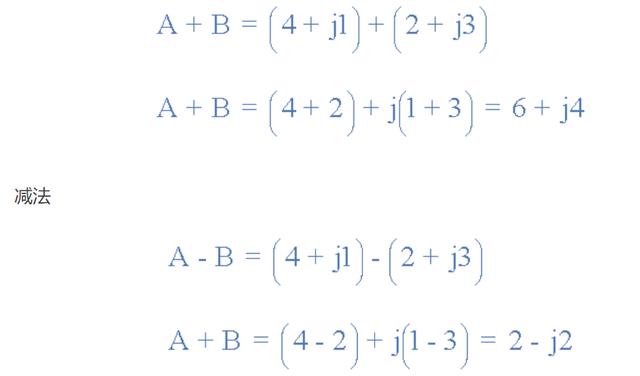
图形化加减法
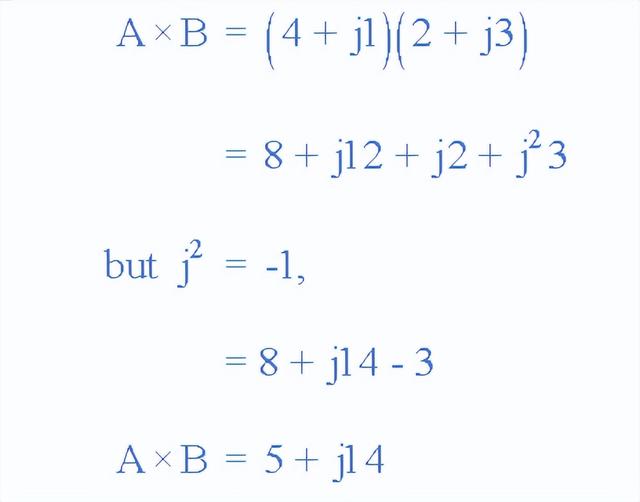
复数的乘法和除法
矩形形式的复数乘法遵循与普通代数或多或少相同的规则以及 j 运算符的连续乘法的一些附加规则,其中:j 2 = -1。因此,例如,将上面的两个向量A = 4 + j1和B = 2 + j3相乘将得到以下结果。
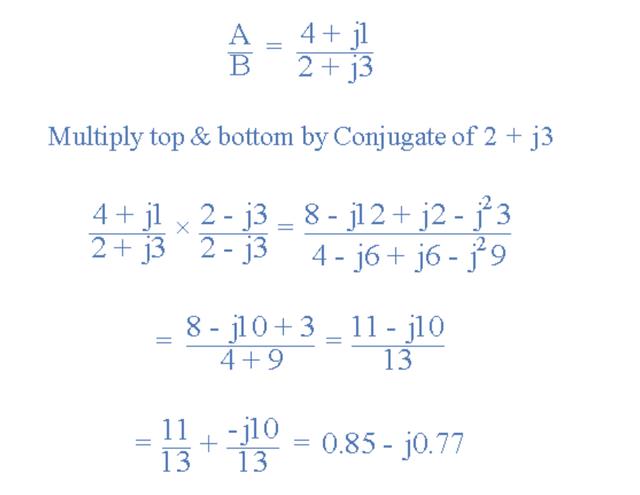
在数学上,矩形形式的复数除法执行起来有点困难,因为它需要使用分母共轭函数将方程的分母转换为实数。这被称为“合理化”。那么复数的除法最好使用“极坐标形式”进行,我们稍后会看到。但是,作为矩形形式的示例,让我们找到向量A除以向量B的值。
复共轭
通过仅反转复数虚数的代数符号,同时保持实数的代数符号相同,并识别 z 的复共轭,使用符号 z 来找到复共轭,或简单的复数共轭。例如,z = 6 + j4的共轭是z = 6 – j4 ,同样z = 6 – j4的共轭是z = 6 + j4。
复数共轭的 Argand 图上的点在实轴上的水平位置与原始复数相同,但垂直位置相反。因此,复共轭可以被认为是复数的反映。下面的例子显示了一个复数6 + j4及其在复平面上的共轭。
共轭复数
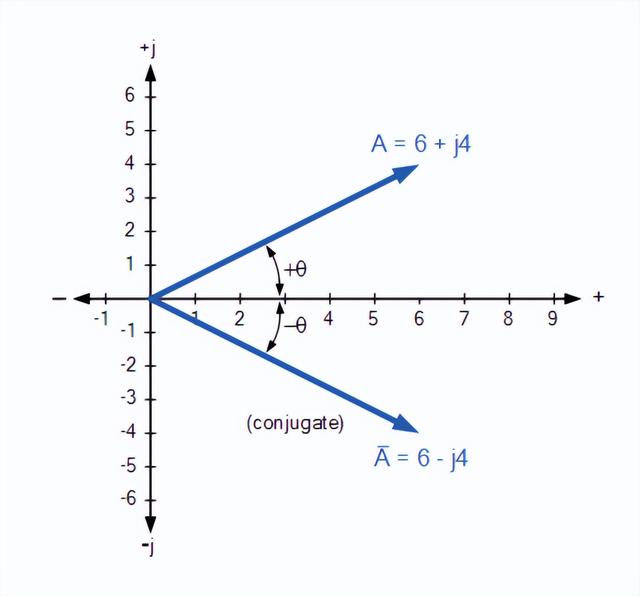
正如我们在上面看到的,复数及其复共轭的总和将始终是实数。然后,复数及其共轭的加法仅给出实数或活性成分的结果,而它们的减法仅给出虚数或活性成分。复数的共轭是电气工程中使用矩形形式确定交流电路视在功率的重要元素。
使用极坐标形式的复数
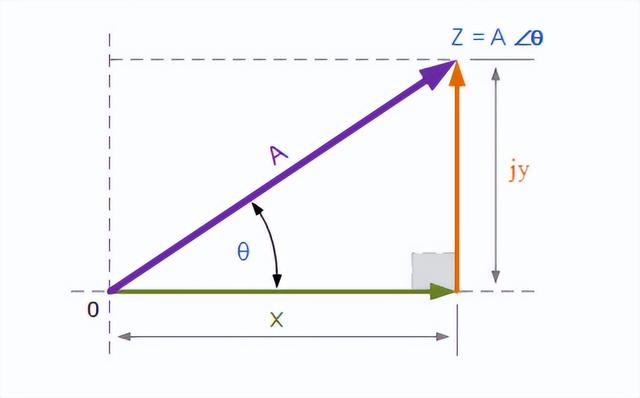
与在复平面上绘制点的矩形形式不同,复数的极坐标形式是根据其大小和角度编写的。因此,极坐标形式向量表示为: Z = A∠±θ,其中:Z是极坐标形式的复数,A是向量的幅值或模数,θ是其角度或A的自变量,可以是正面或负面。点的大小和角度仍然与上面的矩形相同,这次以极坐标形式,点的位置以“三角形”表示,如下所示。
复数的极坐标形式表示
由于点的极坐标表示基于三角形,我们可以使用三角形的简单几何学,尤其是三角学和三角形的毕达哥拉斯定理来求出复数的大小和角度。正如我们在学校记得的那样,三角学处理三角形的边与角之间的关系,因此我们可以将边之间的关系描述为:
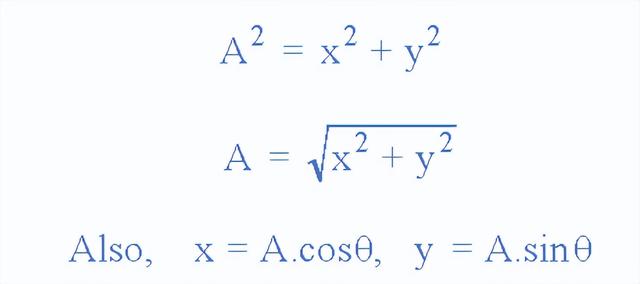
再次使用三角学, A的角度θ给出如下
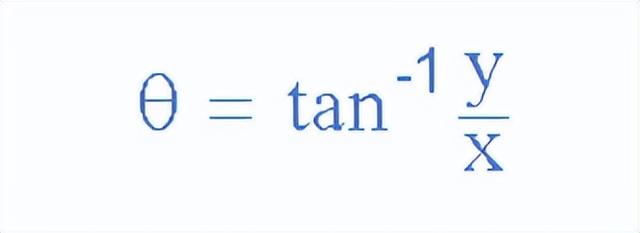
然后在 Polar 形式中, A的长度及其角度表示复数而不是点。同样在极坐标形式中,复数的共轭具有相同的幅度或模数,它是变化的角度的符号,因此例如6 ∠30 o的共轭将是6 ∠– 30 o。
在矩形形式和极坐标形式之间转换
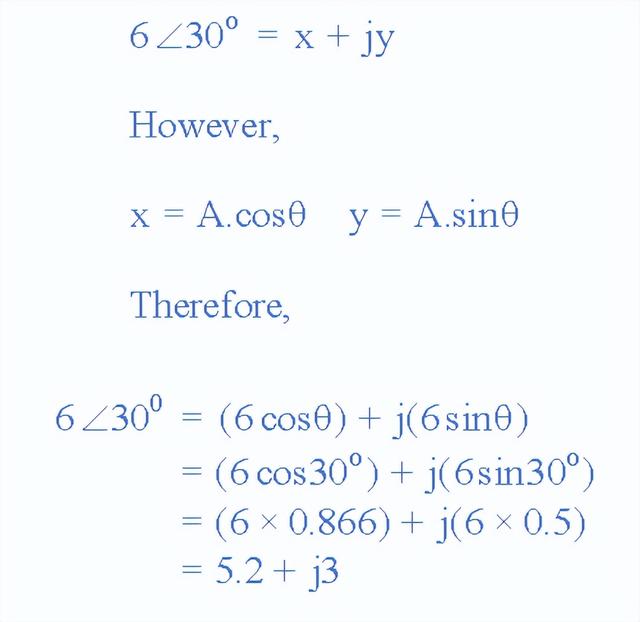
在矩形形式中,我们可以用直角坐标表示一个向量,水平轴是它的实轴,垂直轴是它的虚轴或 j 分量。在极坐标形式中,这些实轴和虚轴简单地用“ A∠θ ”表示。然后使用我们上面的例子,矩形和极坐标之间的关系可以定义为。
将极坐标形式转换为矩形形式,( P→R )
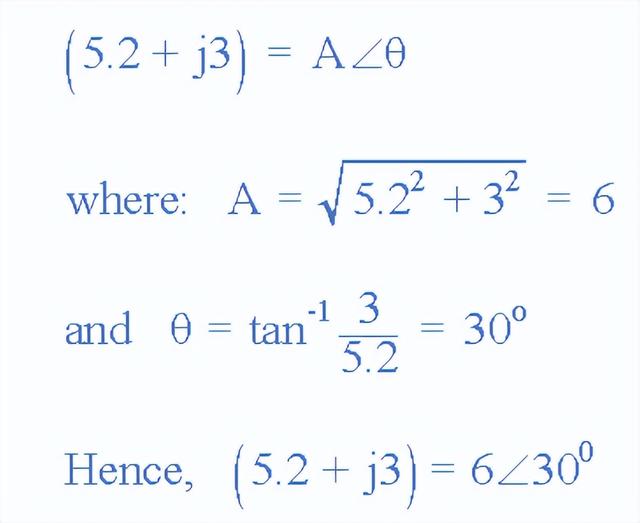
我们还可以从矩形形式转换回极坐标形式,如下所示。
将矩形形式转换为极坐标形式,( R→P )
极坐标形式的乘法和除法
正如我们在上面看到的,矩形形式最适合加减复数,但极坐标形式通常更适合乘法和除法。要将两个极坐标形式的向量相乘,我们必须首先将两个模数或幅度相乘,然后将它们的角度相加。
极坐标形式的乘法

将6 ∠30 o和8 ∠– 45 o以极坐标形式相乘得到。

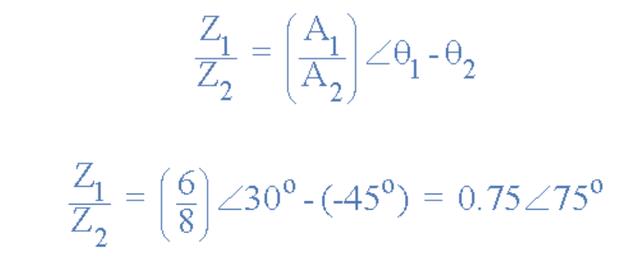
极地形式的分裂
同样,要将两个极坐标形式的向量相除,我们必须除以两个模数,然后减去它们的角度,如图所示。
幸运的是,今天的现代科学计算器内置了数学函数(请查看您的书),可以轻松地将直角坐标转换为极坐标形式 ( R → P ) 以及从极坐标形式转换回直角坐标形式 ( R → P )。
使用指数形式的复数
到目前为止,我们已经考虑了矩形形式( a + jb ) 和极坐标形式( A ∠±θ )中的复数。但是还有第三种表示复数的方法,它类似于对应于正弦波的长度(幅度)和相位角的极坐标形式,但使用自然对数的底数 e = 2.718 281 .. 来找到复数的值。这第三种方法称为指数形式。
指数形式使用直角三角形的正弦 ( sin ) 和余弦 ( cos ) 值的三角函数将复指数定义为复平面中的旋转点。用于查找点位置的指数形式基于Euler's Identity,以瑞士数学家 Leonhard Euler 的名字命名,给出如下:
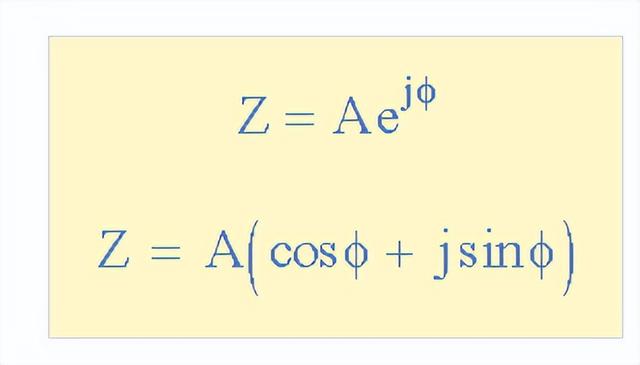
那么欧拉恒等式可以用下面的复平面旋转相量图来表示。
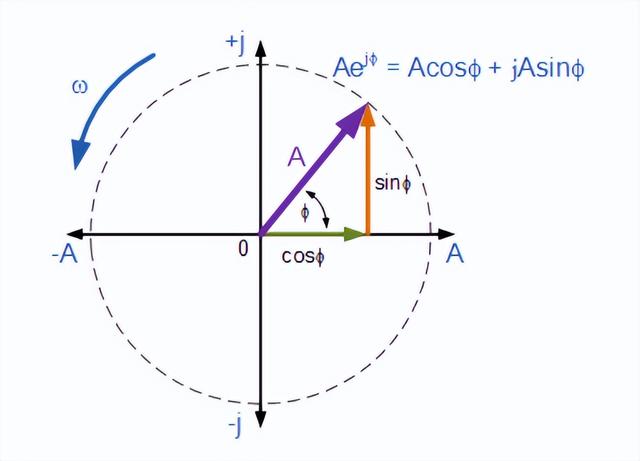
我们可以看到欧拉恒等式与上面的极坐标形式非常相似,它向我们展示了一个数,例如A e jθ,其大小为 1 也是一个复数。我们不仅可以轻松地将指数形式的复数转换为极坐标形式,例如:2 e j30 = 2∠30 , 10 e j120 = 10∠120或-6 e j90 = -6∠90,而且欧拉恒等式还给出我们提供了一种将复数从指数形式转换为矩形形式的方法。然后给出定义复数时指数、极坐标和矩形形式之间的关系。
复数形式
相量符号
到目前为止,我们已经研究了使用复数来表示旋转矢量或静止矢量的不同方法,以在复平面上定义一个点。相量表示法是构造一个复数的过程,该复数具有给定正弦波形的振幅和相位角。
然后,有时称为相量符号或相量变换,将正弦函数的实部:A (t) = A m cos(ωt ± Φ)从时域转移到复数域,也称为频域. 例如:
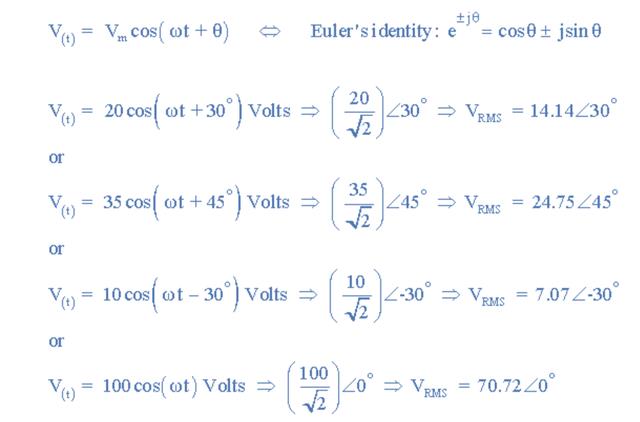
请注意,√ 2将最大幅度转换为有效值或 RMS 值,相位角以弧度 ( ω )给出 。
复数总结
然后总结本教程关于复数和复数在电气工程中的使用。
- 复数由两个不同的数组成,一个实数加上一个虚数。
- 通过使用 j 运算符将虚数与实数区分开来。
- 前面带有字母“ j ”的数字将其标识为复平面中的虚数。
- 根据定义,j-算子j ≡ √ -1
- 虚数和实数一样可以加、减、乘、除。
- “ j ”乘以“ j ”得到j 2 = -1
- 在矩形形式中,复数由复平面上空间中的一个点表示。
- 在极坐标形式中,复数由一条线表示,线的长度为振幅和相位角。
- 在指数形式中,复数由一条线和相应的角度表示,该角度使用自然对数的底。
- 复数可以用以下三种方式之一表示:Z = x + jy » 矩形Z = A ∠Φ » 极坐标形式Z = A e jΦ » 指数形式
- 欧拉恒等式可用于将复数从指数形式转换为矩形形式。
在包括本教程在内的之前的教程中,我们已经看到我们可以使用相量来表示正弦波形,并且它们的幅度和相位角可以写成复数的形式。我们还看到,复数可以用直角坐标、极坐标或指数形式表示,每个复数代数形式之间的转换包括加、减、乘、除。
在接下来的几个与交流串联电路中的相量关系相关的教程中,我们将研究一些常见的无源电路元件的阻抗,并绘制流过元件的电流和施加在其上的电压的相量图,从交流开始反抗。
相关参考
正负角度怎么区分(这个基础知识很有料聊聊四轮定位的那点事儿(一))
四轮定位是汽车售后业务中最常见的保养项目之一,是汽修人应该具备的基本技能;许多路边小轮胎店,都能打出“买轮胎送定位”的口号,把四轮定位当做“赠品”;一些汽修人认为“四轮定位就是把数据调绿了”。四轮定位...
1、女性的胸围分上胸围和下胸围,一般来说,罩杯的大小=上胸围-下胸围,通过上下胸围的尺寸差来确定罩杯型号。2、A杯,9~11cm;B杯,11.5~13.5cm;C杯,14~16cm;D杯,16~20cm;E杯,20~22.5cm;F杯,22.5cm。3、A罩杯:首先A罩杯大家都知...
海滩贝壳(贝壳是怎么成为货币的,如何区分面值大小,海边捡贝壳能发财么)
吃货眼中的贝壳:清水半锅、青葱几段、盐糖适量、大火煮沸、小火收汁。完美,又是硬菜。▲海贝美食但其实小小的贝壳改变过中国,甚至改变过世界。当然并不是因为它好吃。难道是因为它好看?真的!▲贝壳,古人满足虚...
海滩贝壳(贝壳是怎么成为货币的,如何区分面值大小,海边捡贝壳能发财么)
吃货眼中的贝壳:清水半锅、青葱几段、盐糖适量、大火煮沸、小火收汁。完美,又是硬菜。▲海贝美食但其实小小的贝壳改变过中国,甚至改变过世界。当然并不是因为它好吃。难道是因为它好看?真的!▲贝壳,古人满足虚...
弯箍机角度时大时小(钢筋加工弯箍机4-12mm螺纹钢全自动钢筋箍筋板筋一体机)
海汇机床12S钢筋弯箍机生产厂家12S全自动钢筋弯箍机全自动钢筋箍筋板筋一体机钢筋弯箍机有高产,优质,高效,生态,安全生产的特点,实现了高效生产和可持续化发展,提高了工业科学普及和工业现代化水平,设施工业作为...
...以上音节的单词中,才会涉及到重读音节和非重读音节的区分。 开音节又分为了绝对开音节和相对开音节两种,单个元音字母后面没有辅音字母的重读音节称为绝对开音节。 个元音字母后面加单个辅音字母,再加一个不...
不锈钢弯头与碳钢弯头最主要的区别是在于材质的不同,罡正小编将与您分享不同两种材质都具备什么样的特点。不锈钢弯头可保持长时间不腐蚀、不生锈,按照标准可生产出45°、90°、180°弯头。碳钢弯头是改变碳钢管道上管...
步进电机和伺服电机外观区别(干货|教你快速区分伺服电机与步进电机)
要想区分,先得搞懂两种之间的区别。先说工作原理:步进电机是一种将电脉冲转化为角位移的执行机构。当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度,它的旋转是以固定的角度一步...
明基投影仪怎么调大小(明基即将推出新款智能投影仪GV11 具有135度角度调节功能)
明基将于11月21日在日本发售具备135度角度调整、也可以进行天花板投影的智能移动投影仪“GV11”。价格是开放的,但预计在59800日元左右(含税),约合人民币3058元。GV11与2021年10月发售的以往机型“GV30”一样,搭载135度角度...
氨氮中毒的症状特征池鱼氨氮中毒是池塘非离子氮浓度过高,超过鱼类最高重量耐受能力时,使鱼尖生长缓慢甚至发生急性死亡。1、池塘氨氮中毒多发生在连续晴天,并多在午后;2、发生氨氮中毒的池塘,鱼先是呼吸急促,乱...