平面窗口镜(经纬仪的安置与水平角观测,这可是测量最基础的知识了)
Posted
篇首语:书犹药也,善读可以医愚。本文由小常识网(cha138.com)小编为大家整理,主要介绍了平面窗口镜(经纬仪的安置与水平角观测,这可是测量最基础的知识了)相关的知识,希望对你有一定的参考价值。
平面窗口镜(经纬仪的安置与水平角观测,这可是测量最基础的知识了)
(1) 经纬仪的安置
内容——对中,整平。
使仪器竖轴位于过测站点的铅垂线上,水平度盘和横轴处于水平位置,竖盘位于铅垂平面内。
方法——垂球对中,光学对中 。
打开三脚架腿,调整长度使脚架高度适合于观测者高度,张开三角架,安置在测站上,架头大致水平。
取出经纬仪放置在三角架头上,仪器基座中心基本对齐三角架头的中心,旋紧连接螺旋。
1) 垂球对中法安置经纬仪
将垂球悬挂于连接螺旋中心的挂钩上,调整垂球线长度使垂球尖略高于测站点。
粗对中与粗平:平移三脚架,使垂球尖大致对准测站点中心,将三脚架的脚尖踩入土中。
精对中:稍微旋松连接螺旋,双手扶住仪器基座,在架头上移动仪器,使垂球尖准确对准测站点,旋紧连接螺旋。垂球对中误差应小于±3mm。
精确整平:旋转脚螺旋,在相互垂直的两个方向使照准部管水准气泡居中。


2) 使用光学对中法安置经纬仪
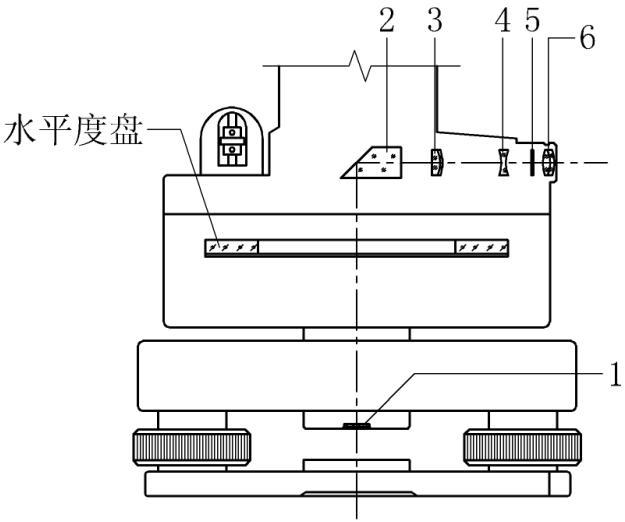
光学对中器的结构。
粗对中——手握三角架,眼睛观察光学对中器,移动三脚架,对中标志基本对准测站点中心,脚尖踩入土中。
精对中——旋转脚螺旋对中,使对中误差<±1mm。
粗平——伸缩脚架腿,使圆水准气泡居中。
精平——转动照准部,旋转脚螺旋,使管水准气泡在相互垂直的两个方向居中。
精平操作会略微破坏已完成的对中关系。
再次精对中——旋松连接螺旋,眼睛观察光学对中器,平移仪器基座(注意,不要有旋转运动),使对中标志准确对准测站点中心,拧紧连接螺旋。
旋转照准部,在相互垂直两方向检查管水准气泡居中情况,否则从再次精对中开始重复操作。
(2) 瞄准和读数
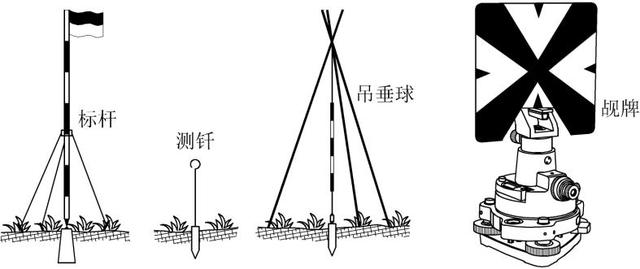
测角照准标志
竖立于测点的标杆、测钎、用三根竹杆悬吊垂球线或觇牌。
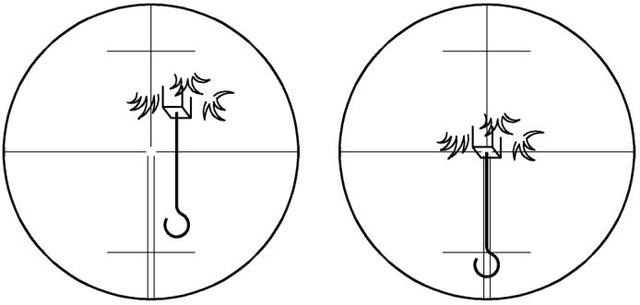
水平角测量,望远镜十字丝竖丝瞄准照准标志。
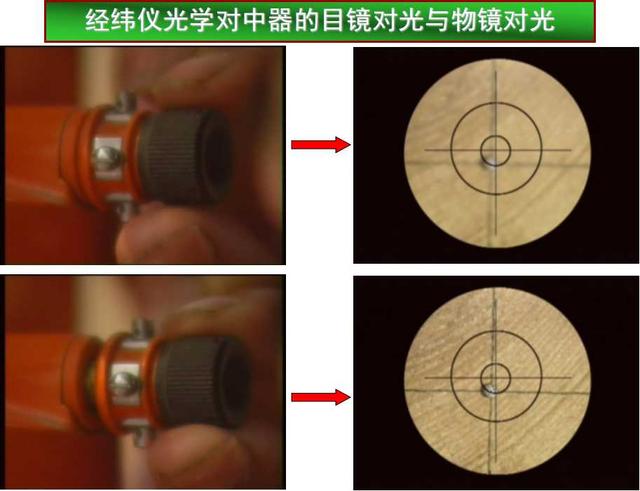
① 目镜对光——望远镜对向明亮背景,
转动目镜使十字丝清晰 ;
② 粗瞄目标——望远镜上的粗瞄器瞄准目标 ,
水平、垂直制动;
③ 精瞄目标——从望远镜观察,
旋转水平、垂直微动螺旋。
④ 读数——打开度盘照明反光镜,调整开度和方向,
照亮读数窗口。
相关参考
经纬仪的检验和校正经纬仪应满足的条件根据观测水平角的原理,要测出水平角的准确数值,经纬仪的水平度盘必须处于水平位置;望远镜上下转动时,其视准轴所旋转的视准面应为一垂直平面。为了保证上述要求,经纬仪各轴...
...域广,作业效率快,单人即可测量,不受通视限制。3、经纬仪:测量水平角和竖直角的测量仪器,分为光学经纬仪和电子经纬仪两种,常用
经纬仪是一种根据测角原理设计的测量水平角和竖直角的测量仪器,分为光学经纬仪和电子经纬仪两种,最常用的是电子经纬仪。经纬仪是望远镜的机械部分,使望远镜能指向不同方向。经纬仪具有两条互相垂直的转轴,以调校...
经纬仪是一种根据测角原理设计的测量水平角和竖直角的测量仪器,分为光学经纬仪和电子经纬仪两种,最常用的是电子经纬仪。经纬仪是望远镜的机械部分,使望远镜能指向不同方向。经纬仪具有两条互相垂直的转轴,以调校...
...知识、测量误差基础理论知识;专业知识:精密水准仪、经纬仪、全站仪(光电测距仪)及平板的基本性能、构造及使用,控制与施工测量,建筑物变形观测,地形测绘;相关知识:施工测量的法规与管理,高科技在施工测量中的应...
建筑水平仪使用方法图解(建筑老师傅教你正确使用水准仪、经纬仪、全站仪)
高程测量是测绘地形图的基本工作之一,另外大量的工程、建筑施工也必须量测地面高程,利用水准仪进行水准测量是精密测量高程的主要方法。一、水准仪器组合:1.望远镜2.调整手轮3.圆水准器4.微调手轮5.水平制动手轮6.管水...
...具的检定与检验为达到正确的符合精度要求的测量成果,经纬仪、水平仪、
方箱平尺角(西安市仪器校准_第三方计量检测机构13712659101)
校准项目:量块、平晶、干涉仪、测长仪、经纬仪、水准仪、测厚仪、坐标测长机、光学计、投影仪、影像测绘仪、万能工具显微镜、电动轮廓仪、气动量仪、偏摆仪、测微仪、液塑限测定仪、直角尺检定仪、百分表检定仪、千...
水平仪如何调水平(5分钟学会水准仪不仅让你会操作,还得懂原理)
...)的高程。2.水准测量观测方法(1)高差法:在M、N两点间安置水准仪,在M、N两点分别竖立水准尺,利用水准移的水平视线分别读取M点、N点上的读数a、b,则两点的高差为a:后视读数(后视观测读数);b:前视读数(前视观测读数)...
...)的高程。2.水准测量观测方法(1)高差法:在M、N两点间安置水准仪,在M、N两点分别竖立水准尺,利用水准移的水平视线分别读取M点、N点上的读数a、b,则两点的高差为a:后视读数(后视观测读数);b:前视读数(